SONAR Based Obstacle Avoidance Robot
I implement a SONAR like system to provide autonomy to an old RC robot.
Devices & Components
Arduino Uno Rev3
Jumper wires (generic)
SG90 Micro-servo motor
HC-05 Bluetooth Module
Ultrasonic Sensor - HC-SR04 (Generic)
Solderless Breadboard Half Size
Project description
Code
Processing IDE Code
processing
This code was not originally made by me. Full credits to How To Mechatronics
1import processing.serial.*; // imports library for serial communication 2import java.awt.event.KeyEvent; // imports library for reading the data from the serial port 3import java.io.IOException; 4Serial myPort; // defines Object Serial 5// defubes variables 6String angle=""; 7String distance=""; 8String data=""; 9String noObject; 10float pixsDistance; 11int iAngle, iDistance; 12int index1=0; 13int index2=0; 14PFont orcFont; 15void setup() { 16 17 size (1920, 1080); // ***CHANGE THIS TO YOUR SCREEN RESOLUTION*** 18 smooth(); 19 myPort = new Serial(this,"COM4", 9600); // starts the serial communication 20 myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance. 21 orcFont = loadFont("OCRAExtended-30.vlw"); 22 23 delay(1000); 24} 25void draw() { 26 27 fill(98,245,31); 28 textFont(orcFont); 29 // simulating motion blur and slow fade of the moving line 30 noStroke(); 31 fill(0,4); 32 rect(0, 0, width, height-height*0.065); 33 34 fill(98,245,31); // green color 35 // calls the functions for drawing the radar 36 drawRadar(); 37 drawLine(); 38 drawObject(); 39 drawText(); 40} 41void serialEvent (Serial myPort) { // starts reading data from the Serial Port 42 // reads the data from the Serial Port up to the character '.' and puts it into the String variable "data". 43 data = myPort.readStringUntil('.'); 44 data = data.substring(0,data.length()-1); 45 46 index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1" 47 angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port 48 distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance 49 50 // converts the String variables into Integer 51 iAngle = int(angle); 52 iDistance = int(distance); 53} 54void drawRadar() { 55 pushMatrix(); 56 translate(width/2,height-height*0.074); // moves the starting coordinats to new location 57 noFill(); 58 strokeWeight(2); 59 stroke(98,245,31); 60 // draws the arc lines 61 arc(0,0,(width-width*0.0625),(width-width*0.0625),PI,TWO_PI); 62 arc(0,0,(width-width*0.27),(width-width*0.27),PI,TWO_PI); 63 arc(0,0,(width-width*0.479),(width-width*0.479),PI,TWO_PI); 64 arc(0,0,(width-width*0.687),(width-width*0.687),PI,TWO_PI); 65 // draws the angle lines 66 line(-width/2,0,width/2,0); 67 line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30))); 68 line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60))); 69 line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90))); 70 line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120))); 71 line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150))); 72 line((-width/2)*cos(radians(30)),0,width/2,0); 73 popMatrix(); 74} 75void drawObject() { 76 pushMatrix(); 77 translate(width/2,height-height*0.074); // moves the starting coordinats to new location 78 strokeWeight(9); 79 stroke(255,10,10); // red color 80 pixsDistance = iDistance*((height-height*0.1666)*0.025); // covers the distance from the sensor from cm to pixels 81 // limiting the range to 40 cms 82 if(iDistance<15){ 83 // draws the object according to the angle and the distance 84 line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),(width-width*0.505)*cos(radians(iAngle)),-(width-width*0.505)*sin(radians(iAngle))); 85 } 86 popMatrix(); 87} 88void drawLine() { 89 pushMatrix(); 90 strokeWeight(9); 91 stroke(30,250,60); 92 translate(width/2,height-height*0.074); // moves the starting coordinats to new location 93 line(0,0,(height-height*0.12)*cos(radians(iAngle)),-(height-height*0.12)*sin(radians(iAngle))); // draws the line according to the angle 94 popMatrix(); 95} 96void drawText() { // draws the texts on the screen 97 98 pushMatrix(); 99 if(iDistance>10) { 100 noObject = "Out of Range"; 101 } 102 else { 103 noObject = "In Range"; 104 } 105 fill(0,0,0); 106 noStroke(); 107 rect(0, height-height*0.0648, width, height); 108 fill(98,245,31); 109 textSize(25); 110 111 text("10cm",width-width*0.3854,height-height*0.0833); 112 text("20cm",width-width*0.281,height-height*0.0833); 113 text("30cm",width-width*0.177,height-height*0.0833); 114 text("40cm",width-width*0.0729,height-height*0.0833); 115 textSize(40); 116 text("Object: " + noObject, width-width*0.875, height-height*0.0277); 117 text("Angle: " + iAngle +" °", width-width*0.48, height-height*0.0277); 118 text("Distance: ", width-width*0.26, height-height*0.0277); 119 if(iDistance<10) { 120 text(" " + iDistance +" cm", width-width*0.225, height-height*0.0277); 121 } 122 textSize(25); 123 fill(98,245,60); 124 translate((width-width*0.4994)+width/2*cos(radians(30)),(height-height*0.0907)-width/2*sin(radians(30))); 125 rotate(-radians(-60)); 126 text("30°",0,0); 127 resetMatrix(); 128 translate((width-width*0.503)+width/2*cos(radians(60)),(height-height*0.0888)-width/2*sin(radians(60))); 129 rotate(-radians(-30)); 130 text("60°",0,0); 131 resetMatrix(); 132 translate((width-width*0.507)+width/2*cos(radians(90)),(height-height*0.0833)-width/2*sin(radians(90))); 133 rotate(radians(0)); 134 text("90°",0,0); 135 resetMatrix(); 136 translate(width-width*0.513+width/2*cos(radians(120)),(height-height*0.07129)-width/2*sin(radians(120))); 137 rotate(radians(-30)); 138 text("120°",0,0); 139 resetMatrix(); 140 translate((width-width*0.5104)+width/2*cos(radians(150)),(height-height*0.0574)-width/2*sin(radians(150))); 141 rotate(radians(-60)); 142 text("150°",0,0); 143 popMatrix(); 144}
Processing IDE Code
processing
This code was not originally made by me. Full credits to How To Mechatronics
1import processing.serial.*; // imports library for serial communication 2import 3 java.awt.event.KeyEvent; // imports library for reading the data from the serial 4 port 5import java.io.IOException; 6Serial myPort; // defines Object Serial 7// 8 defubes variables 9String angle=""; 10String distance=""; 11String data=""; 12String 13 noObject; 14float pixsDistance; 15int iAngle, iDistance; 16int index1=0; 17int 18 index2=0; 19PFont orcFont; 20void setup() { 21 22 size (1920, 1080); // ***CHANGE 23 THIS TO YOUR SCREEN RESOLUTION*** 24 smooth(); 25 myPort = new Serial(this,"COM4", 26 9600); // starts the serial communication 27 myPort.bufferUntil('.'); // reads 28 the data from the serial port up to the character '.'. So actually it reads this: 29 angle,distance. 30 orcFont = loadFont("OCRAExtended-30.vlw"); 31 32 delay(1000); 33} 34void 35 draw() { 36 37 fill(98,245,31); 38 textFont(orcFont); 39 // simulating 40 motion blur and slow fade of the moving line 41 noStroke(); 42 fill(0,4); 43 44 rect(0, 0, width, height-height*0.065); 45 46 fill(98,245,31); // green 47 color 48 // calls the functions for drawing the radar 49 drawRadar(); 50 drawLine(); 51 52 drawObject(); 53 drawText(); 54} 55void serialEvent (Serial myPort) { // starts 56 reading data from the Serial Port 57 // reads the data from the Serial Port up 58 to the character '.' and puts it into the String variable "data". 59 data = 60 myPort.readStringUntil('.'); 61 data = data.substring(0,data.length()-1); 62 63 64 index1 = data.indexOf(","); // find the character ',' and puts it into 65 the variable "index1" 66 angle= data.substring(0, index1); // read the data 67 from position "0" to position of the variable index1 or thats the value of the 68 angle the Arduino Board sent into the Serial Port 69 distance= data.substring(index1+1, 70 data.length()); // read the data from position "index1" to the end of the data 71 pr thats the value of the distance 72 73 // converts the String variables into 74 Integer 75 iAngle = int(angle); 76 iDistance = int(distance); 77} 78void drawRadar() 79 { 80 pushMatrix(); 81 translate(width/2,height-height*0.074); // moves the starting 82 coordinats to new location 83 noFill(); 84 strokeWeight(2); 85 stroke(98,245,31); 86 87 // draws the arc lines 88 arc(0,0,(width-width*0.0625),(width-width*0.0625),PI,TWO_PI); 89 90 arc(0,0,(width-width*0.27),(width-width*0.27),PI,TWO_PI); 91 arc(0,0,(width-width*0.479),(width-width*0.479),PI,TWO_PI); 92 93 arc(0,0,(width-width*0.687),(width-width*0.687),PI,TWO_PI); 94 // draws the 95 angle lines 96 line(-width/2,0,width/2,0); 97 line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30))); 98 99 line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60))); 100 line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90))); 101 102 line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120))); 103 line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150))); 104 105 line((-width/2)*cos(radians(30)),0,width/2,0); 106 popMatrix(); 107} 108void 109 drawObject() { 110 pushMatrix(); 111 translate(width/2,height-height*0.074); // 112 moves the starting coordinats to new location 113 strokeWeight(9); 114 stroke(255,10,10); 115 // red color 116 pixsDistance = iDistance*((height-height*0.1666)*0.025); // covers 117 the distance from the sensor from cm to pixels 118 // limiting the range to 40 119 cms 120 if(iDistance<15){ 121 // draws the object according to the angle and 122 the distance 123 line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),(width-width*0.505)*cos(radians(iAngle)),-(width-width*0.505)*sin(radians(iAngle))); 124 125 } 126 popMatrix(); 127} 128void drawLine() { 129 pushMatrix(); 130 strokeWeight(9); 131 132 stroke(30,250,60); 133 translate(width/2,height-height*0.074); // moves the starting 134 coordinats to new location 135 line(0,0,(height-height*0.12)*cos(radians(iAngle)),-(height-height*0.12)*sin(radians(iAngle))); 136 // draws the line according to the angle 137 popMatrix(); 138} 139void drawText() 140 { // draws the texts on the screen 141 142 pushMatrix(); 143 if(iDistance>10) 144 { 145 noObject = "Out of Range"; 146 } 147 else { 148 noObject = "In Range"; 149 150 } 151 fill(0,0,0); 152 noStroke(); 153 rect(0, height-height*0.0648, width, 154 height); 155 fill(98,245,31); 156 textSize(25); 157 158 text("10cm",width-width*0.3854,height-height*0.0833); 159 160 text("20cm",width-width*0.281,height-height*0.0833); 161 text("30cm",width-width*0.177,height-height*0.0833); 162 163 text("40cm",width-width*0.0729,height-height*0.0833); 164 textSize(40); 165 166 text("Object: " + noObject, width-width*0.875, height-height*0.0277); 167 text("Angle: 168 " + iAngle +" °", width-width*0.48, height-height*0.0277); 169 text("Distance: 170 ", width-width*0.26, height-height*0.0277); 171 if(iDistance<10) { 172 text(" 173 " + iDistance +" cm", width-width*0.225, height-height*0.0277); 174 } 175 176 textSize(25); 177 fill(98,245,60); 178 translate((width-width*0.4994)+width/2*cos(radians(30)),(height-height*0.0907)-width/2*sin(radians(30))); 179 180 rotate(-radians(-60)); 181 text("30°",0,0); 182 resetMatrix(); 183 translate((width-width*0.503)+width/2*cos(radians(60)),(height-height*0.0888)-width/2*sin(radians(60))); 184 185 rotate(-radians(-30)); 186 text("60°",0,0); 187 resetMatrix(); 188 translate((width-width*0.507)+width/2*cos(radians(90)),(height-height*0.0833)-width/2*sin(radians(90))); 189 190 rotate(radians(0)); 191 text("90°",0,0); 192 resetMatrix(); 193 translate(width-width*0.513+width/2*cos(radians(120)),(height-height*0.07129)-width/2*sin(radians(120))); 194 195 rotate(radians(-30)); 196 text("120°",0,0); 197 resetMatrix(); 198 translate((width-width*0.5104)+width/2*cos(radians(150)),(height-height*0.0574)-width/2*sin(radians(150))); 199 200 rotate(radians(-60)); 201 text("150°",0,0); 202 popMatrix(); 203}
Full Code (ARDUINO IDE)
c_cpp
NOTE: I didn't originally plan to share this code, so it's a little messy. You should still be able to get a general understanding of how the system works
1#include <Servo.h> 2 3 4// ULTRASONIC SENSOR 5const int trigPin = 7; //Define Trig pin 6const int echoPin = 6; //Define Echo pin 7 8//ARRAYS 9static float dist_table[82]; 10static float pos_table[82]; 11int face_here = 0; 12 13//SERVO 14Servo servo; 15 16//74HC595 PINS 17int outputEnablePin = 12;//Pin connected to Output enable of 74HC595 18int dataPin = 11; //Pin connected to DS of 74HC595 19int latchPin = 10;//Pin connected to ST_CP of 74HC595 20int clockPin = 9;//Pin connected to SH_CP of 74HC595 21 22//REGISTER ADDRESSES and CONTROL 23byte FWD = 0x46; //Foward 24byte BCK = 0x8A; //Backwards 25byte L = 0x4A; //Left 26byte R = 0x86; //Right 27byte CLEAR = 0x3; //Clear Register 28 29byte data; 30int delayTime; 31 32int PWM=250; 33 34 35void setup() { 36 pinMode(trigPin, OUTPUT); 37 pinMode(echoPin, INPUT); 38 39 pinMode(dataPin, OUTPUT); 40 pinMode(clockPin, OUTPUT); 41 pinMode(latchPin, OUTPUT); 42 pinMode(outputEnablePin, OUTPUT); 43 44 servo.attach(8); 45 Serial.begin(9600); 46 servo.write(87); 47 48 Clear_Reg(); 49 50 //START SEQUENCE 51 delay(10000); 52 SonarscanA(); 53 delay(50); 54 servo.write(87); 55 delay(50); 56 Positioning(); 57 delay(50); 58 Short_Exploration(); 59 60} 61 62 63void loop() {} 64 65//Distance Measurments 66float UltrasonicMeasuring () { 67 float duration, distance; 68 digitalWrite(trigPin, LOW); //Start low for 2 milliseconds 69 delayMicroseconds(2); 70 digitalWrite(trigPin, HIGH); //Sonic burst of 8 cycles for 10 milliseconds 71 delayMicroseconds(10); 72 digitalWrite(trigPin, LOW); 73 duration = pulseIn(echoPin, HIGH); 74 distance = (duration * .0343) / 2; 75 return distance; 76} 77 78//SCAN Process 79float*SonarscanA() { 80 float distance; 81 float distA; 82 float distB; 83 int pos = 10; 84 int p = 20; 85 int i = 0; 86 int j = 0; 87 int prev = 0; 88 int check; 89 int RD; 90 servo.write(10); 91 delay(50); 92 93 for (pos = 10; pos <= 170; pos += 2) { 94 servo.write(pos); 95 Serial.print(pos); 96 Serial.print(","); 97 delayMicroseconds(50); 98 distA = UltrasonicMeasuring (); 99 delay(p); 100 distB = UltrasonicMeasuring (); 101 delay(p); 102 distance = (distA + distB) / 2; 103 104 RD = round(distance); 105 Serial.print(RD); 106 Serial.print("."); 107 108 dist_table[i] = distance; 109 pos_table[i] = pos; 110 i = i + 1; 111 } 112 for (pos = 170; pos >= 10; pos -= 2) { 113 servo.write(pos); 114 Serial.print(pos); 115 Serial.print(","); 116 delayMicroseconds(50); 117 distA = UltrasonicMeasuring (); 118 delay(p); 119 distB = UltrasonicMeasuring (); 120 delay(p); 121 distance = (distA + distB) / 2; 122 123 RD = round(distance); 124 Serial.print(RD); 125 Serial.print("."); 126 127 dist_table[81 - j] = (dist_table[81 - j] + distance) / 2; 128 j = j + 1; 129 } 130 131 for (int c = 0; c < 81; c++) { 132 check = dist_table[c]; 133 if (check >= prev) { 134 face_here = pos_table[c]; 135 prev = check; 136 } 137 } 138 return face_here; 139} 140 141//Determin direction to face after scan 142void Positioning() { 143 if (face_here >= 0 && face_here <= 19) { 144 data = R; 145 delayTime = 510; 146 Register(); 147 } 148 if (face_here >= 20 && face_here <= 39) { 149 data = R; 150 delayTime = 410; 151 Register(); 152 } 153 if (face_here >= 40 && face_here <= 59) { 154 data = R; 155 delayTime = 310; 156 Register(); 157 } 158 if (face_here >= 60 && face_here <= 79) { 159 data = R; 160 delayTime = 160; 161 Register(); 162 } 163 if (face_here >= 80 && face_here <= 99) { 164 data = FWD; 165 delayTime = 100; 166 Register(); 167 } 168 if (face_here >= 100 && face_here <= 119) { 169 data = L; 170 delayTime = 160; 171 Register(); 172 } 173 if (face_here >= 120 && face_here <= 139) { 174 data = L; 175 delayTime = 310; 176 Register(); 177 } 178 if (face_here >= 140 && face_here <= 159) { 179 data = L; 180 delayTime = 410; 181 Register(); 182 } 183 if (face_here >= 160 && face_here <= 179) { 184 data = L; 185 delayTime = 510; 186 Register(); 187 } 188} 189 190 191//Register 192void shiftWrite(int desiredPin, boolean desiredState) { 193 bitWrite(data, desiredPin, desiredState); 194 shiftOut(dataPin, clockPin, MSBFIRST, data); 195 digitalWrite(latchPin, HIGH); 196 digitalWrite(latchPin, LOW); 197} 198 199void Register() 200{ 201 int index; 202 setpwm(PWM); 203 for (index = 0; index <= 7; index++) { 204 shiftWrite(index, HIGH); 205 delay(delayTime); 206 shiftWrite(index, LOW); 207 } 208} 209 210//TEST EXPLORATION 211void Short_Exploration() { 212 int thresh = 15; //Sensor distance threshold 213 float distance; 214 int finish = 0; 215 int RD; 216 int pos = 90; 217 while (finish < 10) { //As a test the robot completes 10 turns before stopping 218 Serial.print(pos); 219 Serial.print(","); 220 distance = UltrasonicMeasuring (); 221 RD = round(distance); 222 Serial.print(RD); 223 Serial.print("."); 224 if (distance < thresh) { 225 Clear_Reg(); 226 Decide_Direction(); 227 finish = finish + 1; 228 } 229 else { 230 Move_FWD(); 231 } 232 } 233} 234 235//MOVE FOWARD Function 236void Move_FWD() { 237 data = FWD; 238 digitalWrite(latchPin, 0); 239 shiftOut(dataPin, clockPin, data); 240 digitalWrite(latchPin, 1); 241} 242 243//Shifting bits into the register 244void shiftOut(int myDataPin, int myClockPin, byte myDataOut) { 245 int i = 0; 246 int pinState; 247 pinMode(myClockPin, OUTPUT); 248 pinMode(myDataPin, OUTPUT); 249 digitalWrite(myDataPin, 0); 250 digitalWrite(myClockPin, 0); 251 for (i = 7; i >= 0; i--) { 252 digitalWrite(myClockPin, 0); 253 if ( myDataOut & (1 << i) ) { 254 pinState = 1; 255 } 256 else { 257 pinState = 0; 258 } 259 digitalWrite(myDataPin, pinState); 260 digitalWrite(myClockPin, 1); 261 digitalWrite(myDataPin, 0); 262 } 263 digitalWrite(myClockPin, 0); 264} 265 266// Direction Decision 267float Decide_Direction() { 268 float distA, distB; 269 float Left, Right; 270 float Turn; 271 int RD; 272 int l = 130; 273 int r = 50; 274 servo.write(130); 275 Serial.print(l); 276 Serial.print(","); 277 delay(350); 278 distA = UltrasonicMeasuring (); 279 delay(20); 280 distB = UltrasonicMeasuring (); 281 Left = (distA + distB) / 2; 282 283 RD = round(Left); 284 Serial.print(RD); 285 Serial.print("."); 286 287 servo.write(50); 288 Serial.print(r); 289 Serial.print(","); 290 delay(350); 291 distA = UltrasonicMeasuring (); 292 delay(20); 293 distB = UltrasonicMeasuring (); 294 Right = (distA + distB) / 2; 295 296 RD = round(Right); 297 Serial.print(RD); 298 Serial.print("."); 299 300 servo.write(87); 301 302 if (Left > Right) { 303 data = L; 304 delayTime = 350; 305 Register(); 306 } 307 if (Right > Left) { 308 data = R; 309 delayTime = 350; 310 Register(); 311 } 312} 313 314//CLAR REGISTER 315void Clear_Reg() { 316 data = CLEAR; 317 delayTime = 150; 318 Register(); 319} 320 321 322//PWM setup 323void setpwm(byte pwm) // 0 to 255 324{ 325 analogWrite(outputEnablePin, 255-pwm); 326}
Downloadable files
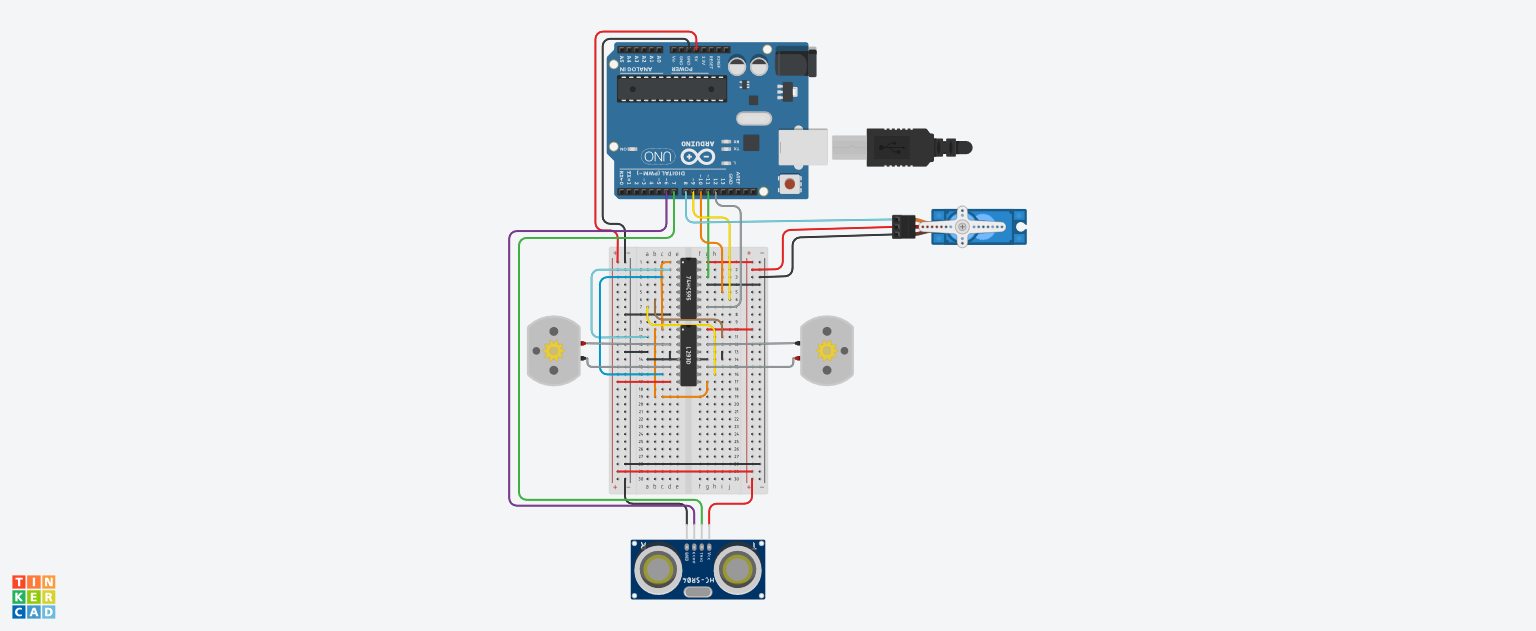
Basic Schematic
Note: Certain components are not shown as they were specific to this project. I find it more beneficial to all to see and understand the concepts behind the motor control and sornar system.
Basic Schematic
Basic Schematic
Note: Certain components are not shown as they were specific to this project. I find it more beneficial to all to see and understand the concepts behind the motor control and sornar system.
Basic Schematic
Comments
Only logged in users can leave comments