Omnibot with BLE (Arduino GIGA & ESP32)
This project showcases the integration of BLE Bluetooth communication between the Arduino GIGA and ESP32 for the wireless control of an OmniBot.
Devices & Components
1
Arduino GIGA R1 WiFi
1
40 colored female-female jumper wires
2
Arduino Motor Shield Rev3
1
3WD Smart Robot Car Chassis Kit
1
ESP32 C6 DevKitC-1 N8
1
Push Button
1
Battery Shield
1
18650 Battery Shield V3 For Raspberry Pi WEMOS For Arduino Micro USB Type-A USB Output Diy Kit
Hardware & Tools
1
drill, screwdriver, soldering iron
Software & Tools
Arduino IDE
Project description
Code
Controller
cpp
This code is for the controller.
1// Make sure to install esp32 by Espressif Systems in Boards Manager 2// Uninstall ArduinoBLE by Arduino in Library Manager if installed 3// Or other libraries that have files named BLEDevice.h, BLEUtils.h, BLEServer.h 4 5// Bluetooth server module 6#include <BLEDevice.h> 7#include <BLEUtils.h> 8#include <BLEServer.h> 9 10// See the following for generating UUIDs: 11// https://www.uuidgenerator.net/ 12#define SERVICE_UUID "3ac8b22d-fcb0-49df-a499-d12d04b1181b" 13#define CHARACTERISTIC_UUID "48a8ebfb-5895-485a-825d-1b6cee20664d" 14 15// Define joystick pins 16const int buttonPin = 4; // Button connected to GPIO 4 17const int yPin = 5; // X-axis connected to GPIO 5 18const int xPin = 6; // Y-axis connected to GPIO 6 19 20BLECharacteristic *pCharacteristic; 21 22void setup() { 23 // Initialize serial communication 24 Serial.begin(115200); 25 26 // Initialize Bluetooth 27 Serial.println("Starting BLE work!"); 28 BLEDevice::init("ESP32_Controller"); // Create the BLE Device 29 BLEServer *pServer = BLEDevice::createServer(); 30 BLEService *pService = pServer->createService(SERVICE_UUID); 31 32 pCharacteristic = pService->createCharacteristic( 33 CHARACTERISTIC_UUID, 34 BLECharacteristic::PROPERTY_READ | 35 BLECharacteristic::PROPERTY_NOTIFY // Allow notifications 36 ); 37 38 pCharacteristic->setValue("1600,1600,1"); // Initial dummy value 39 pService->start(); 40 41 BLEAdvertising *pAdvertising = BLEDevice::getAdvertising(); 42 pAdvertising->addServiceUUID(SERVICE_UUID); 43 pAdvertising->setScanResponse(true); 44 pAdvertising->setMinPreferred(0x06); // functions that help with iPhone connections issue 45 pAdvertising->setMinPreferred(0x12); 46 BLEDevice::startAdvertising(); 47 48 Serial.println("BLE ready. Now broadcasting!"); 49 // Set button pin as input with pullup resistor 50 pinMode(buttonPin, INPUT_PULLUP); 51} 52 53void loop() { 54 // Read X and Y values (0 - 4095 on ESP32) 55 int xValue = analogRead(xPin); 56 int yValue = analogRead(yPin); 57 // Read button state (0 when pressed, 1 when released) 58 int buttonState = digitalRead(buttonPin); 59 60 // Format data: "x,y,button" 61 String data = String(xValue) + "," + String(yValue) + "," + String(buttonState); 62 63 // Send data via BLE 64 pCharacteristic->setValue(data.c_str()); 65 pCharacteristic->notify(); 66 67 // Debug output 68 Serial.println(data); 69 delay(20); // Reduce if more responsiveness needed 70 71}
Omnibot
cpp
This code is for the robot.
1// Now install ArduinoBLE by Arduino in Library Manager 2#include <RPC.h> // Library for M4 chip 3#include <ArduinoBLE.h> // Bluetooth Library 4 5int xValue = 0, yValue = 0, buttonState = 0; 6int Xspeed = 0, Yspeed = 0; 7 8// Presets for switch 1 to change direction 9volatile bool SW1; 10volatile bool state1 = 0; // 0 = CCW, 1 = CW 11volatile bool preSW1 = 0; // preset = 1 to start at CW 12 13// Motor pins 14const int in1 = 22, in2 = 23, PWM1 = 2; //motor 1 15const int in3 = 24, in4 = 25, PWM2 = 3; //motor 2 16const int in5 = 26, in6 = 27, PWM3 = 4; //motor 3 17 18// Bluetooth setup 19const char* peripheralName = "ESP32_Controller"; 20const char* characteristicUUID = "48a8ebfb-5895-485a-825d-1b6cee20664d"; 21 22BLEDevice peripheral; 23BLECharacteristic joystickCharacteristic; 24 25void setup() { 26 RPC.begin(); // Boots M4 27 Serial.begin(115200); // Initialize serial communication 28 29 // Motor pin config 30 pinMode(PWM1, OUTPUT); pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); 31 pinMode(PWM2, OUTPUT); pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); 32 pinMode(PWM3, OUTPUT); pinMode(in5, OUTPUT); pinMode(in6, OUTPUT); 33 34 pinMode(8, INPUT_PULLUP); // Direction toggle switch 35 // Initialize BLE 36 if (!BLE.begin()) { 37 Serial.println("Failed to start BLE!"); 38 while (1); 39 } 40 41 BLE.scan(); // Start scanning for peripheral 42} 43 44void loop() { 45 46 if (!peripheral || !peripheral.connected()) { 47 peripheral = BLE.available(); 48 49 if (peripheral && peripheral.localName() == peripheralName) { 50 BLE.stopScan(); 51 Serial.print("Connecting to "); 52 Serial.println(peripheral.localName()); 53 54 if (peripheral.connect()) { 55 Serial.println("Connected to joystick!"); 56 57 if (peripheral.discoverAttributes()) { 58 joystickCharacteristic = peripheral.characteristic(characteristicUUID); 59 60 if (joystickCharacteristic) { 61 joystickCharacteristic.subscribe(); // Enable notifications 62 Serial.println("Subscribed to joystick data."); 63 } 64 } 65 } else { 66 Serial.println("Failed to connect."); 67 BLE.scan(); // Retry 68 } 69 } 70 return; 71 } 72 73 // Check for new joystick data 74 if (joystickCharacteristic.valueUpdated()) { 75 int len = joystickCharacteristic.valueLength(); 76 uint8_t buffer[len + 1]; 77 joystickCharacteristic.readValue(buffer, len); 78 buffer[len] = '\0'; // Null-terminate 79 80 String value = String((char*)buffer); 81 // Serial.print("Received: "); Serial.println(value); 82 83 sscanf(value.c_str(), "%d,%d,%d", &xValue, &yValue, &buttonState); 84 } 85 86 87 if (xValue >= 1570) { 88 digitalWrite(in1, HIGH); digitalWrite(in2, LOW); // Forward 89 digitalWrite(in3, HIGH); digitalWrite(in4, LOW); 90 Xspeed = map(xValue, 1570, 3217, 0, 255); 91 analogWrite(PWM1, Xspeed); 92 analogWrite(PWM2, Xspeed); 93 } 94 else if (xValue <= 1560) { 95 digitalWrite(in1, LOW); digitalWrite(in2, HIGH); // Backward 96 digitalWrite(in3, LOW); digitalWrite(in4, HIGH); 97 Xspeed = map(xValue, 1560, 0, 0, 255); 98 analogWrite(PWM1, Xspeed); 99 analogWrite(PWM2, Xspeed); 100 } 101 else { 102 digitalWrite(in1, HIGH); digitalWrite(in2, HIGH); // Brake 103 digitalWrite(in3, HIGH); digitalWrite(in4, HIGH); 104 Xspeed = 0; 105 analogWrite(PWM1, Xspeed); 106 analogWrite(PWM2, Xspeed); 107 } 108 109 // Direction control 110 111 if (yValue >= 1650){ 112 digitalWrite(in5, LOW); digitalWrite(in6, HIGH); 113 Yspeed = map(yValue, 1650, 4095, 0, 255); 114 analogWrite(PWM3, Yspeed); 115 } 116 else if (yValue <= 1630){ 117 digitalWrite(in5, HIGH); digitalWrite(in6, LOW); 118 Yspeed = map(yValue, 1630, 0, 0, 255); 119 analogWrite(PWM3, Yspeed); 120 } else { 121 digitalWrite(in5, HIGH); digitalWrite(in6, HIGH); 122 Yspeed = 0; 123 analogWrite(PWM3, Yspeed); 124 } 125 126 Serial.print("Received: "); Serial.print(xValue); Serial.print(","); Serial.println(Xspeed); 127}
Documentation
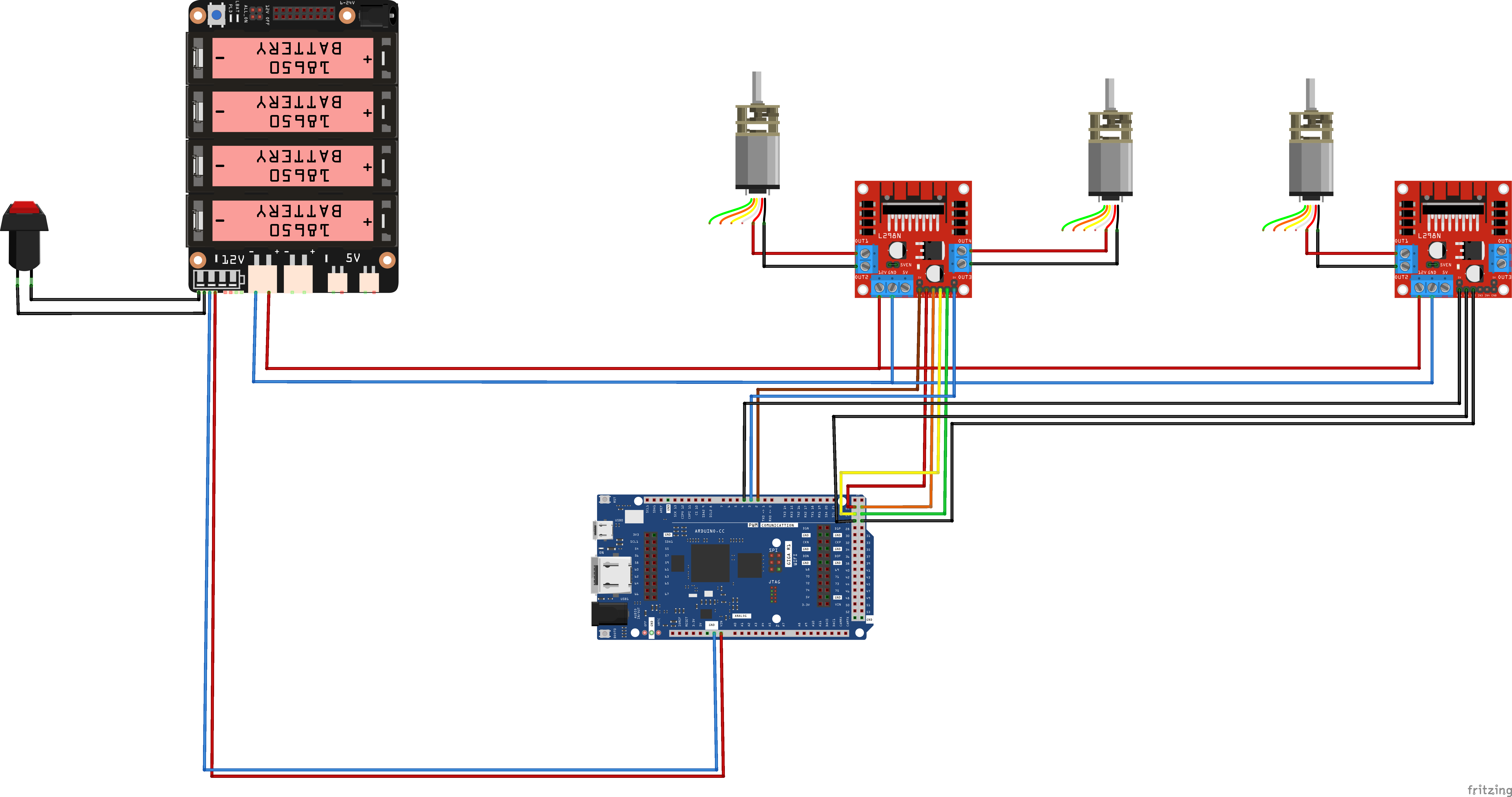
Omnibot Wiring
This is the simple wiring setup for Omnibot.
OmniBot.png
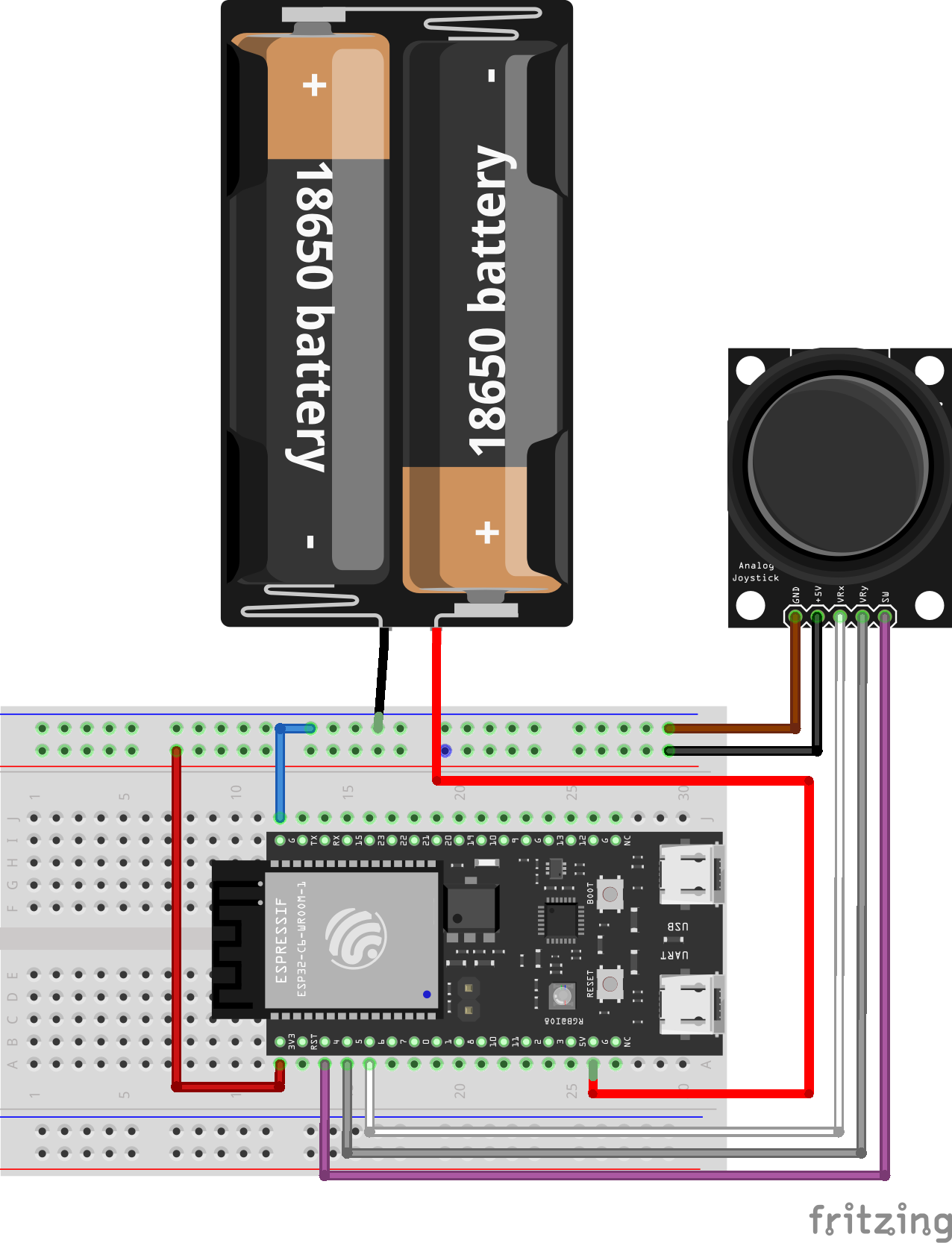
Controller
For power, use 5V pins from the battery shield.
OmniController.png
Comments
Only logged in users can leave comments