Devices & Components
1
Arduino Uno Rev3
1
Dual H-Bridge motor drivers L298
10
Jumper wires (generic)
Hardware & Tools
1
Hot glue gun (generic)
1
Soldering iron (generic)
Software & Tools
Arduino IDE
Project description
Code
liner.ino
arduino
Downloadable files
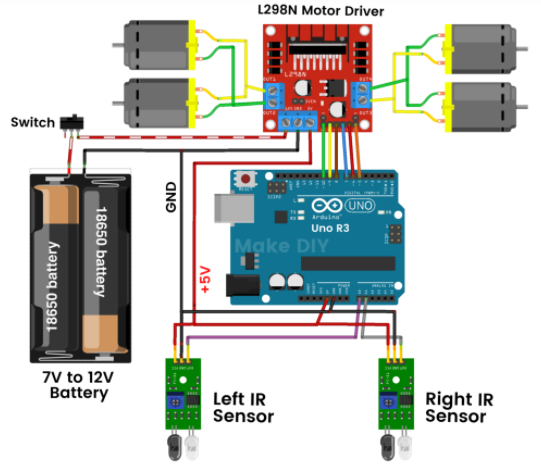
schematics
follow the diagram
schematics
schematics
follow the diagram
schematics
Comments
Only logged in users can leave comments