Talk to the Hand: ASL Gesture Recognition Glove
Creating a functional glove to bridge the communication gap between hearing and non-hearing individuals!
Devices & Components
1
Bluetooth Low Energy 4.0 Module - HM-10
1
Grove - 6-Axis Accelerometer & Gyroscope
1
Breadboard - 400 contacts
1
USB 2.0 Cable Type A/B
1
40 colored male-female jumper wires
1
Box 525 1% precision resistors - 17 values
1
Arduino Uno Rev3
1
40 colored male-male jumper wires
1
40 colored female-female jumper wires
1
Black Gloves
1
foam sheet
Software & Tools
Arduino IDE
1
DSD Tech
Project description
Code
cpp
Code can be adjusted to personal preferences
1//#include <Dabble.h> 2 #include <SoftwareSerial.h> 3#include <Adafruit_MPU6050.h> 4#include <Adafruit_Sensor.h> 5#include <Wire.h> 6Adafruit_MPU6050 mpu; 7 8 9// Define Bluetooth module pins 10SoftwareSerial BTSerial(10, 11); // RX | TX (Arduino pins) 11 12 13// Define the analog pins for each flex sensor 14const int flexSensor1 = A0; 15const int flexSensor2 = A1; 16const int flexSensor3 = A2; 17const int flexSensor4 = A3; 18const int flexSensor5 = A4; 19 20 21//char Incoming_value[] = "abc"; 22 23 24 25 26// Thresholds for identifying movements 27const int thresholdLow = 200; 28const int thresholdHigh = 220; 29 30 31 32 33// Variable to hold current mode (0 = Letter Mode, 1 = Number Mode) 34int currentMode = 0; 35 36 37 38 39void setup() { 40 // Start the serial communication 41 Serial.begin(9600); 42 BTSerial.begin(9600); 43 pinMode(2, INPUT_PULLUP); // Pin 2 for mode switch (connect a button) 44 45 46 // Try to initialize! 47 if (!mpu.begin()) { 48 Serial.println("Failed to find MPU6050 chip"); 49 while (1) { 50 delay(10); 51 } 52 } 53 54 55 // set accelerometer range to +-8G 56 mpu.setAccelerometerRange(MPU6050_RANGE_8_G); 57 58 59 // set gyro range to +- 500 deg/s 60 mpu.setGyroRange(MPU6050_RANGE_500_DEG); 61 62 63 // set filter bandwidth to 21 Hz 64 mpu.setFilterBandwidth(MPU6050_BAND_21_HZ); 65 66 67 68 69 if (currentMode == 0) { 70 BTSerial.println("Word Mode"); 71 } else { 72 BTSerial.println("Number Mode"); 73 } 74} 75 76 77 78 79 80 81 82 83void loop() { 84 // Read button to toggle between letter and number mode 85 //if (digitalRead(2) == LOW) { // Assuming button press is LOW 86 //currentMode = !currentMode; // Toggle between 0 (letters) and 1 (numbers) 87 //delay(1300); // Debounce delay 88 //} 89 90 91 92 93//if (BTSerial.available()>0){ 94 String Incoming_value = BTSerial.readString(); 95 Serial.println("Incoming value is :"); 96 Serial.println(Incoming_value); 97 Serial.println("\n"); 98//} 99 100 101 102 103 // Read values from each flex sensor 104 int sensorValue1 = analogRead(flexSensor1); 105 int sensorValue2 = analogRead(flexSensor2); 106 int sensorValue3 = analogRead(flexSensor3); 107 int sensorValue4 = analogRead(flexSensor4); 108 int sensorValue5 = analogRead(flexSensor5); 109 110 111 112 113 114 115 116 117 // Print raw sensor values for debugging 118 Serial.print("Sensor 1: "); 119 Serial.print(sensorValue1); 120 Serial.print(" | Sensor 2: "); 121 Serial.print(sensorValue2); 122 Serial.print(" | Sensor 3: "); 123 Serial.print(sensorValue3); 124 Serial.print(" | Sensor 4: "); 125 Serial.print(sensorValue4); 126 Serial.print(" | Sensor 5: "); 127 Serial.println(sensorValue5); 128 129 // Call a function to identify gestures and print the result 130 if (currentMode == 0) { 131 Serial.println("Letter Mode"); 132 identifyLetters(sensorValue1, sensorValue2, sensorValue3, sensorValue4, sensorValue5); 133 } else { 134 Serial.println("Number Mode"); 135 identifyNumbers(sensorValue1, sensorValue2, sensorValue3, sensorValue4, sensorValue5); 136 } 137 138 139//Reading the motion sensor 140 sensors_event_t a, g, temp; 141 mpu.getEvent(&a, &g, &temp); 142 Serial.print("Acceleration X: "); 143Serial.print(a.acceleration.x); 144Serial.print(", Y: "); 145Serial.print(a.acceleration.y); 146Serial.print(", Z: "); 147Serial.print(a.acceleration.z); 148Serial.println(" m/s^2"); 149 150 151 152 153 154 155 156 157 // Delay to avoid overwhelming the Serial Monitor 158 delay(5000); 159} 160 161 162 163 164 165 166 167 168void identifyLetters(int val1, int val2, int val3, int val4, int val5) { 169 if (val1 > thresholdHigh && val2 > thresholdHigh && val3 < thresholdLow && val4 < thresholdLow && val5 < thresholdLow) { 170 Serial.println("G"); 171 BTSerial.println("G"); 172 } 173 else if (val1 > thresholdHigh && val2 > thresholdHigh && val3 > thresholdHigh && val4 < thresholdLow && val5 < thresholdLow) { 174 Serial.println("Hi"); 175 BTSerial.println("Hi"); 176 } 177 else if (val1 < thresholdLow && val2 < thresholdLow && val3 < thresholdLow && val4 < thresholdLow && val5 > thresholdHigh) { 178 Serial.println("I"); 179 BTSerial.println("I"); 180 } 181 else if (val1 < thresholdLow && val2 < thresholdLow && val3 < thresholdLow && val4 < thresholdLow && val5 < thresholdLow) { 182 Serial.println("S"); 183 BTSerial.println("S"); 184 } else { 185 Serial.println("Unknown Letter"); 186 BTSerial.println("Unknown Letter"); 187 } 188} 189 190 191 192 193 194 195 196 197void identifyNumbers(int val1, int val2, int val3, int val4, int val5) { 198 if (val1 < thresholdLow && val2 < thresholdLow && val3 < thresholdLow && val4 < thresholdLow && val5 < thresholdLow) { 199 Serial.println("0"); 200 BTSerial.println("0"); 201 } 202 else if (val1 < thresholdLow && val2 > thresholdHigh && val3 < thresholdLow && val4 < thresholdLow && val5 < thresholdLow) { 203 Serial.println("1"); 204 BTSerial.println("1"); 205 } 206 else if (val1 < thresholdLow && val2 > thresholdHigh && val3 > thresholdHigh && val4 < thresholdLow && val5 < thresholdLow) { 207 Serial.println("2"); 208 BTSerial.println("2"); 209 } 210 else if (val1 > thresholdHigh && val2 > thresholdHigh && val3 > thresholdHigh && val4 < thresholdLow && val5 < thresholdLow) { 211 Serial.println("3"); 212 BTSerial.println("3"); 213 } 214 else if (val1 < thresholdLow && val2 > thresholdHigh && val3 > thresholdHigh && val4 > thresholdHigh && val5 > thresholdHigh) { 215 Serial.println("4"); 216 BTSerial.println("4"); 217 } 218 else if (val1 > thresholdHigh && val2 > thresholdHigh && val3 > thresholdHigh && val4 > thresholdHigh && val5 > thresholdHigh) { 219 Serial.println("5"); 220 BTSerial.println("5"); 221 } else { 222 Serial.println("Unknown Number"); 223 BTSerial.println("Unknown Number"); 224 } 225} 226 227 228 229 230 231 232============================ 233 234 235float valX = a.acceleration.x; 236float valY = a.acceleration.y; 237float valZ = a.acceleration.z;
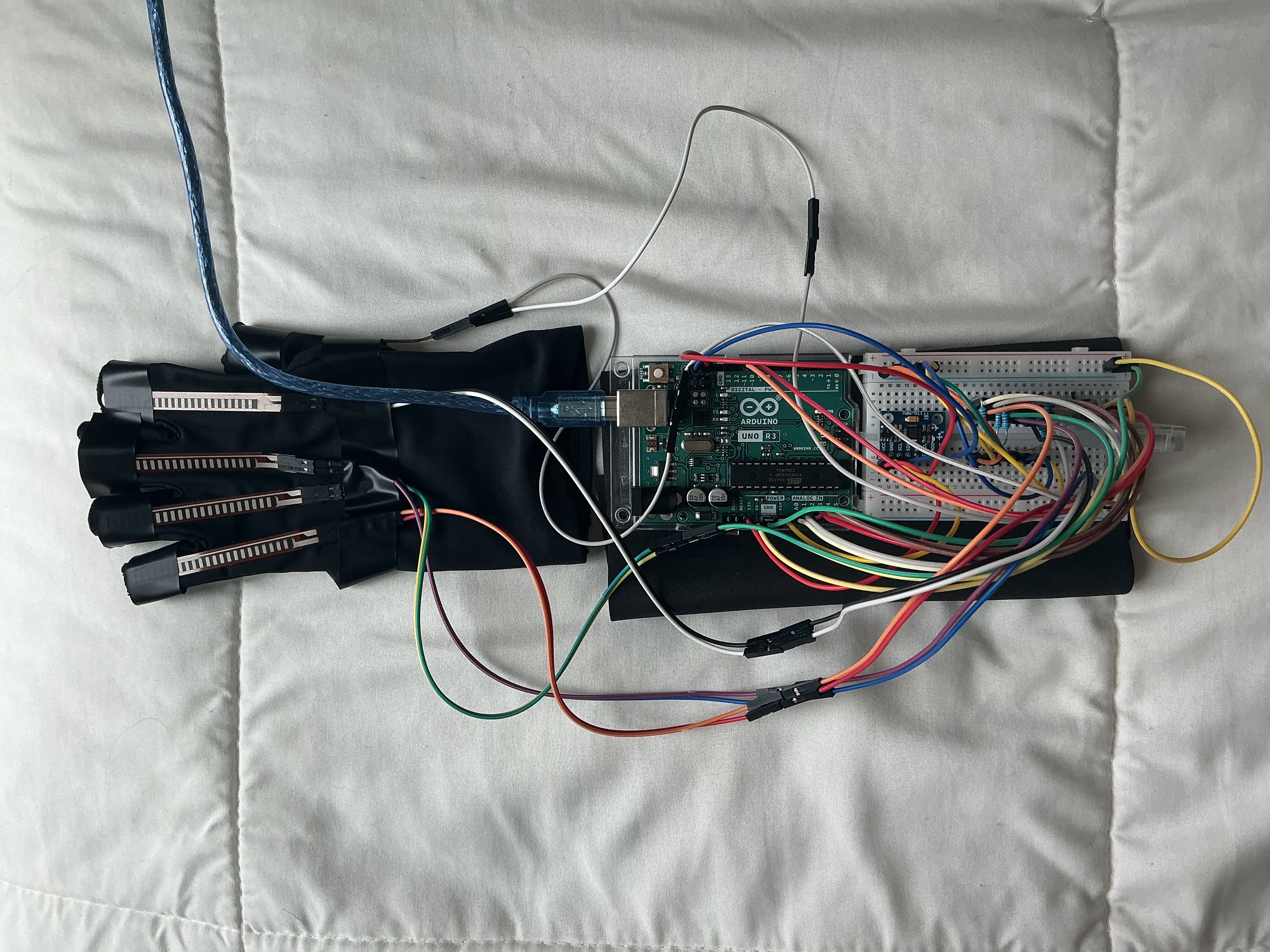
Documentation
IMG_5681
IMG_5681.jpeg
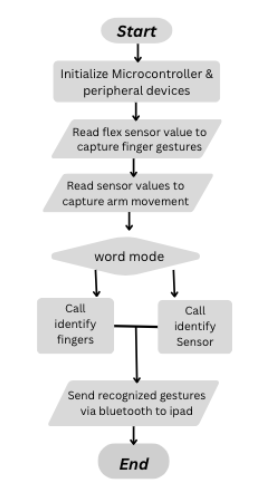
Flowchart
Flowchart showing sequence of translation
Screenshot (3).png
Comments
Only logged in users can leave comments