Easy Light Tracking Device
Light tracking made easy with Arduino
Devices & Components
Arduino Nano
Resistor 10k ohm
SG90 Micro-servo motor
Photo resistor
Jumper wires (generic)
Hardware & Tools
3D Printer (generic)
Soldering iron (generic)
Project description
Code
Source code
arduino
This is the source code for this tutorial
1/** 2 Author: Kevin Chen AKA Stonez56 3 My Blog to see more tutorials: https://stonez56.blogspot.com 4 YouTube channel:https://www.youtube.com/channel/UCLdNauvVOrss3fF8LJXrtAw 5 6 Program function flow 7 1. Reading four light sensor values 8 2. Average top two(Top left, Top right), bottom two(Bottom left, Bottom right) 9 3. Average left two(Top left, Bottom left), right two (Top right, Bottom right) 10 4. Compare 4 averaged value and make servo mave toward the biggest number side 11 12 v0 Light traking Gimbal base to get readings 13 v1 Write servo code in and move servo accordingly 14 15 | 16 Top left | Top right 17 -----------------+---------------------- 18 Bottom left | Bottom right 19 | 20*/ 21#include <Servo.h> 22Servo servo1_x; 23Servo servo2_y; 24 25//Light Sensor Pin definitions 26const uint8_t light_top_left_PIN = A6; 27const uint8_t light_bottom_left_PIN = A5; 28const uint8_t light_top_rigth_PIN = A2; 29const uint8_t light_bottom_right_PIN = A1; 30//Potentiometer pin 31const int potPIN = A0; 32//Servo pins 33const int servo1_x_pin = 2; 34const int servo2_y_pin = 4; 35 36 37//User define variables 38// Gimbal movement tolerance 50~255 39byte gimbal_movement_tolerance = 100; 40//Photo sensor max reading times for average (for more accuracy) 41byte max_reading = 10; 42// define original servo angle 43uint8_t originalAngle = 92; 44uint8_t x_last = originalAngle; // X last postion 45uint8_t y_last = originalAngle; // Y last postion 46uint8_t moveSpeed = 10; //How fast show this Servo move 47uint8_t maxSpeed = 50; //Max speed 48uint8_t minSpeed = 1; 49uint8_t y_minAngle = 1; //Mimum angle 50uint8_t y_maxAngle = 180; //Maximum angle 51uint8_t x_minAngle = 90; //Mimum angle 52uint8_t x_maxAngle = 180; //Maximum angle 53 54void setup() { 55 Serial.begin(57600); 56 57 pinMode(light_top_left_PIN, INPUT); 58 pinMode(light_bottom_left_PIN, INPUT); 59 pinMode(light_top_rigth_PIN, INPUT); 60 pinMode(light_bottom_right_PIN, INPUT); 61 62 servo1_x.attach(servo1_x_pin); 63 servo1_x.write(originalAngle); //move servo to defined angle 64 servo2_y.attach(servo2_y_pin); 65 servo2_y.write(originalAngle); //move servo to defined angle 66 67 pinMode(LED_BUILTIN, OUTPUT); 68 digitalWrite(LED_BUILTIN, LOW); 69 70} 71 72void loop() { 73 char moveTowards = ' '; 74 75 76 int potValue = analogRead(potPIN); 77 Serial.print(F("potValue: ")); 78 Serial.println(potValue); 79 moveSpeed = map(potValue, 0, 500, minSpeed, maxSpeed); 80 Serial.print(F("moveSpeed: ")); 81 Serial.println(moveSpeed); 82 moveTowards = getFacingToward(); //find out which side to move 83 84 85// Serial.print(F("moveTowards: ")); 86// Serial.println(moveTowards); 87 moveServo(moveTowards); 88 89 delay(80); 90} 91 92void moveServo(char moveTowards) { 93 94 95 //previous position were stored in x_last, y_last 96 switch (moveTowards) { 97 case 'T': //Move towards top 98 if (x_last - moveSpeed < x_minAngle) { 99 x_last = x_minAngle; 100 servo1_x.write(x_last); 101 } else { 102 x_last -= moveSpeed; 103 servo1_x.write(x_last); 104 } 105 break; 106 case 'B': //Move towards bottom 107 if (x_last + moveSpeed > x_maxAngle) { 108 x_last = x_maxAngle; 109 servo1_x.write(x_last); 110 } else { 111 x_last += moveSpeed; 112 servo1_x.write(x_last); 113 } 114 break; 115 case 'L': //Move towards left 116 if (y_last - moveSpeed < y_minAngle) { 117 y_last = y_minAngle; 118 servo2_y.write(y_last); 119 } else { 120 y_last -= moveSpeed; 121 servo2_y.write(y_last); 122 } 123 break; 124 case 'R': 125 if (y_last + moveSpeed > y_maxAngle) { 126 y_last = y_maxAngle; 127 servo2_y.write(y_last); 128 } else { 129 y_last += moveSpeed; 130 servo2_y.write(y_last); 131 } 132 break; 133 default: 134 //Don't move servo 135 break; 136 } 137 138} 139 140/** 141 This fuction get reading max_reading times and return average 142 if it sees an 0, it will skip it 143*/ 144int averageReading(int PIN, byte max_reading) { 145 int total = 0; 146 int current = 0; 147 148 for (byte i = 0; i <= max_reading; i++) { 149 current = analogRead(PIN); 150 if (current == 0) { 151 current = analogRead(PIN); 152 } 153 total += current; 154 } 155 156 return total / (max_reading); 157} 158 159/** 160 161 162 Parameters: N/A 163 Return: char; T, B, R, L to indicate the moving directoin 164 '-' means not moving at all 165*/ 166char getFacingToward() { 167 //1. Read each pin max_reading times 168 169 int top_left = averageReading(light_top_left_PIN, max_reading); 170 int bottom_left = averageReading(light_bottom_left_PIN, max_reading); 171 int top_right = averageReading(light_top_rigth_PIN, max_reading); 172 int bottom_right = averageReading(light_bottom_right_PIN, max_reading * 3); 173 174 //Show photo sensor readings... 175 Serial.print(F("Top left-A6: ")); 176 Serial.println(top_left); 177 Serial.print(F("Bottom left-A5: ")); 178 Serial.println(bottom_left); 179 Serial.print(F("Top right-A2: ")); 180 Serial.println(top_right); 181 Serial.print(F("Bottom rightA1: ")); 182 Serial.println(bottom_right); 183 184 //2. Get max value sides(two averaged, see above) 185 byte go_direction[4] = {0, 0, 0, 0}; 186 int toward[4] = {0, 0, 0, 0}; //Top, Bottom, Left, Right 187 toward[0] = (top_left + top_right) / 2 ; 188 toward[1] = (bottom_left + bottom_right) / 2 ; 189 toward[2] = (top_left + bottom_left) / 2; 190 toward[3] = (top_right + bottom_right) / 2; 191 192 //3. Add all side and average, 193 // if each side is within the tolerance then don't move Gimbal 194 // average = toward[0] +...toward[3] 195 // average - toward[0] .... toward[3], if all within gimbal_movement_tolerance, then no move 196 int total_toward = 0; 197 total_toward += toward[0]; 198 total_toward += toward[1]; 199 total_toward += toward[2]; 200 total_toward += toward[3]; 201 //get average 202 int total_average = total_toward / 4; //4 sides 203 Serial.print(F("total_average:")); 204 Serial.println(total_average); 205 // if each side is within the tolerance then don't move Gimbal 206 boolean shouldMove = false; 207 //else move the gimbal 208 if (total_average - toward[0] > gimbal_movement_tolerance) shouldMove = true; 209 if (total_average - toward[1] > gimbal_movement_tolerance) shouldMove = true; 210 if (total_average - toward[2] > gimbal_movement_tolerance) shouldMove = true; 211 if (total_average - toward[3] > gimbal_movement_tolerance) shouldMove = true; 212 213 Serial.print(F("toward 0 TOP : ")); 214 Serial.println(toward[0]); 215 Serial.print(F("toward 1 BOTTOM: ")); 216 Serial.println(toward[1]); 217 Serial.print(F("toward 2 LEFT: ")); 218 Serial.println(toward[2]); 219 Serial.print(F("toward 3 RIGHT: ")); 220 Serial.println(toward[3]); 221 222 //Find the biggest number to decide which side to go, 223 // but if four values are quite similar, send '-' back to indicate not moving 224 char facing = ' ' ; 225 if (shouldMove) { 226 int max_ = 0; 227 if (toward[0] > max_) { 228 max_ = toward[0]; 229 facing = 'T'; 230 } 231 if (toward[1] > max_) { 232 max_ = toward[1]; 233 facing = 'B'; 234 } 235 if (toward[2] > max_) { 236 max_ = toward[2]; 237 facing = 'L'; 238 } 239 if (toward[3] > max_) { 240 max_ = toward[3]; 241 facing = 'R'; 242 } 243 } else { 244 facing = '-'; //no need to move 245 } 246 // Serial.print(F("shouldMove: ")); 247 // Serial.println(shouldMove); 248 return facing; 249}
Source code
arduino
This is the source code for this tutorial
1/** 2 Author: Kevin Chen AKA Stonez56 3 My Blog to see more tutorials: 4 https://stonez56.blogspot.com 5 YouTube channel:https://www.youtube.com/channel/UCLdNauvVOrss3fF8LJXrtAw 6 7 8 Program function flow 9 1. Reading four light sensor values 10 2. 11 Average top two(Top left, Top right), bottom two(Bottom left, Bottom right) 12 13 3. Average left two(Top left, Bottom left), right two (Top right, Bottom right) 14 15 4. Compare 4 averaged value and make servo mave toward the biggest number side 16 17 18 v0 Light traking Gimbal base to get readings 19 v1 Write servo code 20 in and move servo accordingly 21 22 | 23 Top left 24 | Top right 25 -----------------+---------------------- 26 Bottom 27 left | Bottom right 28 | 29*/ 30#include <Servo.h> 31Servo 32 servo1_x; 33Servo servo2_y; 34 35//Light Sensor Pin definitions 36const uint8_t 37 light_top_left_PIN = A6; 38const uint8_t light_bottom_left_PIN = A5; 39const 40 uint8_t light_top_rigth_PIN = A2; 41const uint8_t light_bottom_right_PIN = A1; 42//Potentiometer 43 pin 44const int potPIN = A0; 45//Servo pins 46const int servo1_x_pin = 2; 47const 48 int servo2_y_pin = 4; 49 50 51//User define variables 52// Gimbal movement 53 tolerance 50~255 54byte gimbal_movement_tolerance = 100; 55//Photo sensor max 56 reading times for average (for more accuracy) 57byte max_reading = 10; 58// define 59 original servo angle 60uint8_t originalAngle = 92; 61uint8_t x_last = originalAngle; 62 // X last postion 63uint8_t y_last = originalAngle; // Y last postion 64uint8_t 65 moveSpeed = 10; //How fast show this Servo move 66uint8_t maxSpeed = 50; //Max 67 speed 68uint8_t minSpeed = 1; 69uint8_t y_minAngle = 1; //Mimum angle 70uint8_t 71 y_maxAngle = 180; //Maximum angle 72uint8_t x_minAngle = 90; //Mimum angle 73uint8_t 74 x_maxAngle = 180; //Maximum angle 75 76void setup() { 77 Serial.begin(57600); 78 79 80 pinMode(light_top_left_PIN, INPUT); 81 pinMode(light_bottom_left_PIN, INPUT); 82 83 pinMode(light_top_rigth_PIN, INPUT); 84 pinMode(light_bottom_right_PIN, INPUT); 85 86 87 servo1_x.attach(servo1_x_pin); 88 servo1_x.write(originalAngle); //move 89 servo to defined angle 90 servo2_y.attach(servo2_y_pin); 91 servo2_y.write(originalAngle); 92 //move servo to defined angle 93 94 pinMode(LED_BUILTIN, OUTPUT); 95 digitalWrite(LED_BUILTIN, 96 LOW); 97 98} 99 100void loop() { 101 char moveTowards = ' '; 102 103 104 105 int potValue = analogRead(potPIN); 106 Serial.print(F("potValue: ")); 107 Serial.println(potValue); 108 109 moveSpeed = map(potValue, 0, 500, minSpeed, maxSpeed); 110 Serial.print(F("moveSpeed: 111 ")); 112 Serial.println(moveSpeed); 113 moveTowards = getFacingToward(); //find 114 out which side to move 115 116 117// Serial.print(F("moveTowards: ")); 118// 119 Serial.println(moveTowards); 120 moveServo(moveTowards); 121 122 delay(80); 123} 124 125 126void moveServo(char moveTowards) { 127 128 129 //previous position were stored 130 in x_last, y_last 131 switch (moveTowards) { 132 case 'T': //Move towards top 133 134 if (x_last - moveSpeed < x_minAngle) { 135 x_last = x_minAngle; 136 137 servo1_x.write(x_last); 138 } else { 139 x_last -= moveSpeed; 140 141 servo1_x.write(x_last); 142 } 143 break; 144 case 'B': //Move 145 towards bottom 146 if (x_last + moveSpeed > x_maxAngle) { 147 x_last 148 = x_maxAngle; 149 servo1_x.write(x_last); 150 } else { 151 x_last 152 += moveSpeed; 153 servo1_x.write(x_last); 154 } 155 break; 156 157 case 'L': //Move towards left 158 if (y_last - moveSpeed < y_minAngle) 159 { 160 y_last = y_minAngle; 161 servo2_y.write(y_last); 162 } 163 else { 164 y_last -= moveSpeed; 165 servo2_y.write(y_last); 166 } 167 168 break; 169 case 'R': 170 if (y_last + moveSpeed > y_maxAngle) { 171 172 y_last = y_maxAngle; 173 servo2_y.write(y_last); 174 } else 175 { 176 y_last += moveSpeed; 177 servo2_y.write(y_last); 178 } 179 180 break; 181 default: 182 //Don't move servo 183 break; 184 } 185 186 187} 188 189/** 190 This fuction get reading max_reading times and return average 191 192 if it sees an 0, it will skip it 193*/ 194int averageReading(int PIN, byte max_reading) 195 { 196 int total = 0; 197 int current = 0; 198 199 for (byte i = 0; i <= max_reading; 200 i++) { 201 current = analogRead(PIN); 202 if (current == 0) { 203 current 204 = analogRead(PIN); 205 } 206 total += current; 207 } 208 209 return total 210 / (max_reading); 211} 212 213/** 214 215 216 Parameters: N/A 217 Return: 218 char; T, B, R, L to indicate the moving directoin 219 '-' 220 means not moving at all 221*/ 222char getFacingToward() { 223 //1. Read each pin 224 max_reading times 225 226 int top_left = averageReading(light_top_left_PIN, max_reading); 227 228 int bottom_left = averageReading(light_bottom_left_PIN, max_reading); 229 int 230 top_right = averageReading(light_top_rigth_PIN, max_reading); 231 int bottom_right 232 = averageReading(light_bottom_right_PIN, max_reading * 3); 233 234 //Show photo 235 sensor readings... 236 Serial.print(F("Top left-A6: ")); 237 Serial.println(top_left); 238 239 Serial.print(F("Bottom left-A5: ")); 240 Serial.println(bottom_left); 241 Serial.print(F("Top 242 right-A2: ")); 243 Serial.println(top_right); 244 Serial.print(F("Bottom rightA1: 245 ")); 246 Serial.println(bottom_right); 247 248 //2. Get max value sides(two 249 averaged, see above) 250 byte go_direction[4] = {0, 0, 0, 0}; 251 int toward[4] 252 = {0, 0, 0, 0}; //Top, Bottom, Left, Right 253 toward[0] = (top_left + top_right) 254 / 2 ; 255 toward[1] = (bottom_left + bottom_right) / 2 ; 256 toward[2] = (top_left 257 + bottom_left) / 2; 258 toward[3] = (top_right + bottom_right) / 2; 259 260 //3. 261 Add all side and average, 262 // if each side is within the tolerance then don't 263 move Gimbal 264 // average = toward[0] +...toward[3] 265 // average - toward[0] 266 .... toward[3], if all within gimbal_movement_tolerance, then no move 267 int total_toward 268 = 0; 269 total_toward += toward[0]; 270 total_toward += toward[1]; 271 total_toward 272 += toward[2]; 273 total_toward += toward[3]; 274 //get average 275 int total_average 276 = total_toward / 4; //4 sides 277 Serial.print(F("total_average:")); 278 Serial.println(total_average); 279 280 // if each side is within the tolerance then don't move Gimbal 281 boolean 282 shouldMove = false; 283 //else move the gimbal 284 if (total_average - toward[0] 285 > gimbal_movement_tolerance) shouldMove = true; 286 if (total_average - toward[1] 287 > gimbal_movement_tolerance) shouldMove = true; 288 if (total_average - toward[2] 289 > gimbal_movement_tolerance) shouldMove = true; 290 if (total_average - toward[3] 291 > gimbal_movement_tolerance) shouldMove = true; 292 293 Serial.print(F("toward 294 0 TOP : ")); 295 Serial.println(toward[0]); 296 Serial.print(F("toward 1 BOTTOM: 297 ")); 298 Serial.println(toward[1]); 299 Serial.print(F("toward 2 LEFT: ")); 300 301 Serial.println(toward[2]); 302 Serial.print(F("toward 3 RIGHT: ")); 303 Serial.println(toward[3]); 304 305 306 //Find the biggest number to decide which side to go, 307 // but if four 308 values are quite similar, send '-' back to indicate not moving 309 char facing 310 = ' ' ; 311 if (shouldMove) { 312 int max_ = 0; 313 if (toward[0] > max_) 314 { 315 max_ = toward[0]; 316 facing = 'T'; 317 } 318 if (toward[1] 319 > max_) { 320 max_ = toward[1]; 321 facing = 'B'; 322 } 323 if (toward[2] 324 > max_) { 325 max_ = toward[2]; 326 facing = 'L'; 327 } 328 if (toward[3] 329 > max_) { 330 max_ = toward[3]; 331 facing = 'R'; 332 } 333 } else 334 { 335 facing = '-'; //no need to move 336 } 337 // Serial.print(F("shouldMove: 338 ")); 339 // Serial.println(shouldMove); 340 return facing; 341}
Downloadable files
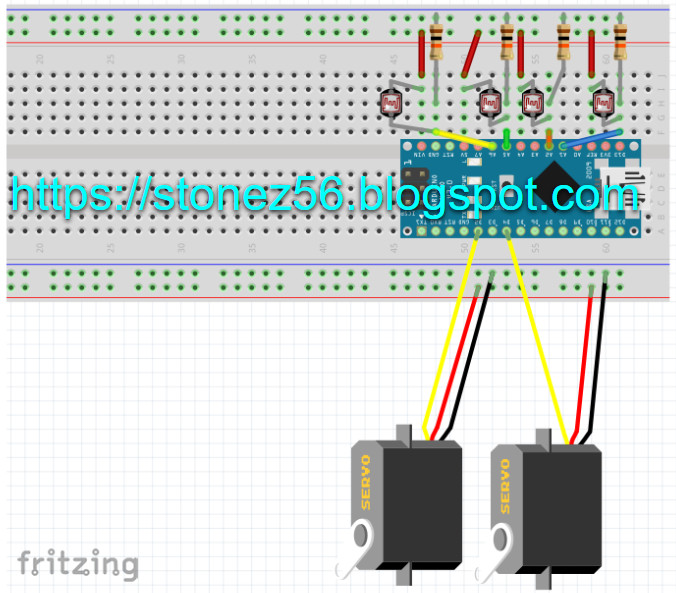
Schematic file
This is made with Fritzing
Schematic file
Documentation
3D SG90 Servo 2-axis Servo
This is the 3D file used in this example
https://www.thingiverse.com/thing:2892903?fbclid=IwAR3V7gCUuwR16AMj0QbHZZu0_hXa5w2EaHyFVb7AAzlzgd4ViHfj5boNqRs
3D SG90 Servo 2-axis Servo
This is the 3D file used in this example
https://www.thingiverse.com/thing:2892903?fbclid=IwAR3V7gCUuwR16AMj0QbHZZu0_hXa5w2EaHyFVb7AAzlzgd4ViHfj5boNqRs
Comments
Only logged in users can leave comments