Obstacle Avoiding Robot
An Obstacle Avoidance Robot is an intelligent robot, which can automatically sense and overcome obstacles on its path using Arduino UNO.
Devices & Components
1
Arduino Uno Rev3
4
DC motor (generic)
1
Ultrasonic Sensor - HC-SR04 (Generic)
1
SG90 Micro-servo motor
5
Jumper wires (generic)
1
SparkFun Ardumoto - Motor Driver Shield
3
9V battery (generic)
Software & Tools
Arduino IDE
Project description
Code
Code Used
c_cpp
1//ARDUINO OBSTACLE AVOIDING CAR// 2// Before uploading the code you have to install the necessary library// 3//AFMotor Library https://learn.adafruit.com/adafruit-motor-shield/library-install // 4//NewPing Library https://github.com/livetronic/Arduino-NewPing// 5//Servo Library https://github.com/arduino-libraries/Servo.git // 6// To Install the libraries go to sketch >> Include Library >> Add .ZIP File >> Select the Downloaded ZIP files From the Above links // 7 8 9#include <AFMotor.h> 10#include <NewPing.h> 11#include <Servo.h> 12 13#define TRIG_PIN A0 14#define ECHO_PIN A1 15#define MAX_DISTANCE 200 16#define MAX_SPEED 190 // sets speed of DC motors 17#define MAX_SPEED_OFFSET 20 18 19NewPing sonar(TRIG_PIN, ECHO_PIN, MAX_DISTANCE); 20 21AF_DCMotor motor1(1, MOTOR12_1KHZ); 22AF_DCMotor motor2(2, MOTOR12_1KHZ); 23AF_DCMotor motor3(3, MOTOR34_1KHZ); 24AF_DCMotor motor4(4, MOTOR34_1KHZ); 25Servo myservo; 26 27boolean goesForward=false; 28int distance = 100; 29int speedSet = 0; 30 31void setup() { 32 33 myservo.attach(10); 34 myservo.write(115); 35 delay(2000); 36 distance = readPing(); 37 delay(100); 38 distance = readPing(); 39 delay(100); 40 distance = readPing(); 41 delay(100); 42 distance = readPing(); 43 delay(100); 44} 45 46void loop() { 47 int distanceR = 0; 48 int distanceL = 0; 49 delay(40); 50 51 if(distance<=15) 52 { 53 moveStop(); 54 delay(100); 55 moveBackward(); 56 delay(300); 57 moveStop(); 58 delay(200); 59 distanceR = lookRight(); 60 delay(200); 61 distanceL = lookLeft(); 62 delay(200); 63 64 if(distanceR>=distanceL) 65 { 66 turnRight(); 67 moveStop(); 68 }else 69 { 70 turnLeft(); 71 moveStop(); 72 } 73 }else 74 { 75 moveForward(); 76 } 77 distance = readPing(); 78} 79 80int lookRight() 81{ 82 myservo.write(50); 83 delay(500); 84 int distance = readPing(); 85 delay(100); 86 myservo.write(115); 87 return distance; 88} 89 90int lookLeft() 91{ 92 myservo.write(170); 93 delay(500); 94 int distance = readPing(); 95 delay(100); 96 myservo.write(115); 97 return distance; 98 delay(100); 99} 100 101int readPing() { 102 delay(70); 103 int cm = sonar.ping_cm(); 104 if(cm==0) 105 { 106 cm = 250; 107 } 108 return cm; 109} 110 111void moveStop() { 112 motor1.run(RELEASE); 113 motor2.run(RELEASE); 114 motor3.run(RELEASE); 115 motor4.run(RELEASE); 116 } 117 118void moveForward() { 119 120 if(!goesForward) 121 { 122 goesForward=true; 123 motor1.run(FORWARD); 124 motor2.run(FORWARD); 125 motor3.run(FORWARD); 126 motor4.run(FORWARD); 127 for (speedSet = 0; speedSet < MAX_SPEED; speedSet +=2) // slowly bring the speed up to avoid loading down the batteries too quickly 128 { 129 motor1.setSpeed(speedSet); 130 motor2.setSpeed(speedSet); 131 motor3.setSpeed(speedSet); 132 motor4.setSpeed(speedSet); 133 delay(5); 134 } 135 } 136} 137 138void moveBackward() { 139 goesForward=false; 140 motor1.run(BACKWARD); 141 motor2.run(BACKWARD); 142 motor3.run(BACKWARD); 143 motor4.run(BACKWARD); 144 for (speedSet = 0; speedSet < MAX_SPEED; speedSet +=2) // slowly bring the speed up to avoid loading down the batteries too quickly 145 { 146 motor1.setSpeed(speedSet); 147 motor2.setSpeed(speedSet); 148 motor3.setSpeed(speedSet); 149 motor4.setSpeed(speedSet); 150 delay(5); 151 } 152} 153 154void turnRight() { 155 motor1.run(FORWARD); 156 motor2.run(FORWARD); 157 motor3.run(BACKWARD); 158 motor4.run(BACKWARD); 159 delay(500); 160 motor1.run(FORWARD); 161 motor2.run(FORWARD); 162 motor3.run(FORWARD); 163 motor4.run(FORWARD); 164} 165 166void turnLeft() { 167 motor1.run(BACKWARD); 168 motor2.run(BACKWARD); 169 motor3.run(FORWARD); 170 motor4.run(FORWARD); 171 delay(500); 172 motor1.run(FORWARD); 173 motor2.run(FORWARD); 174 motor3.run(FORWARD); 175 motor4.run(FORWARD); 176} 177
Downloadable files
Circuit Diagram
Circuit Diagram
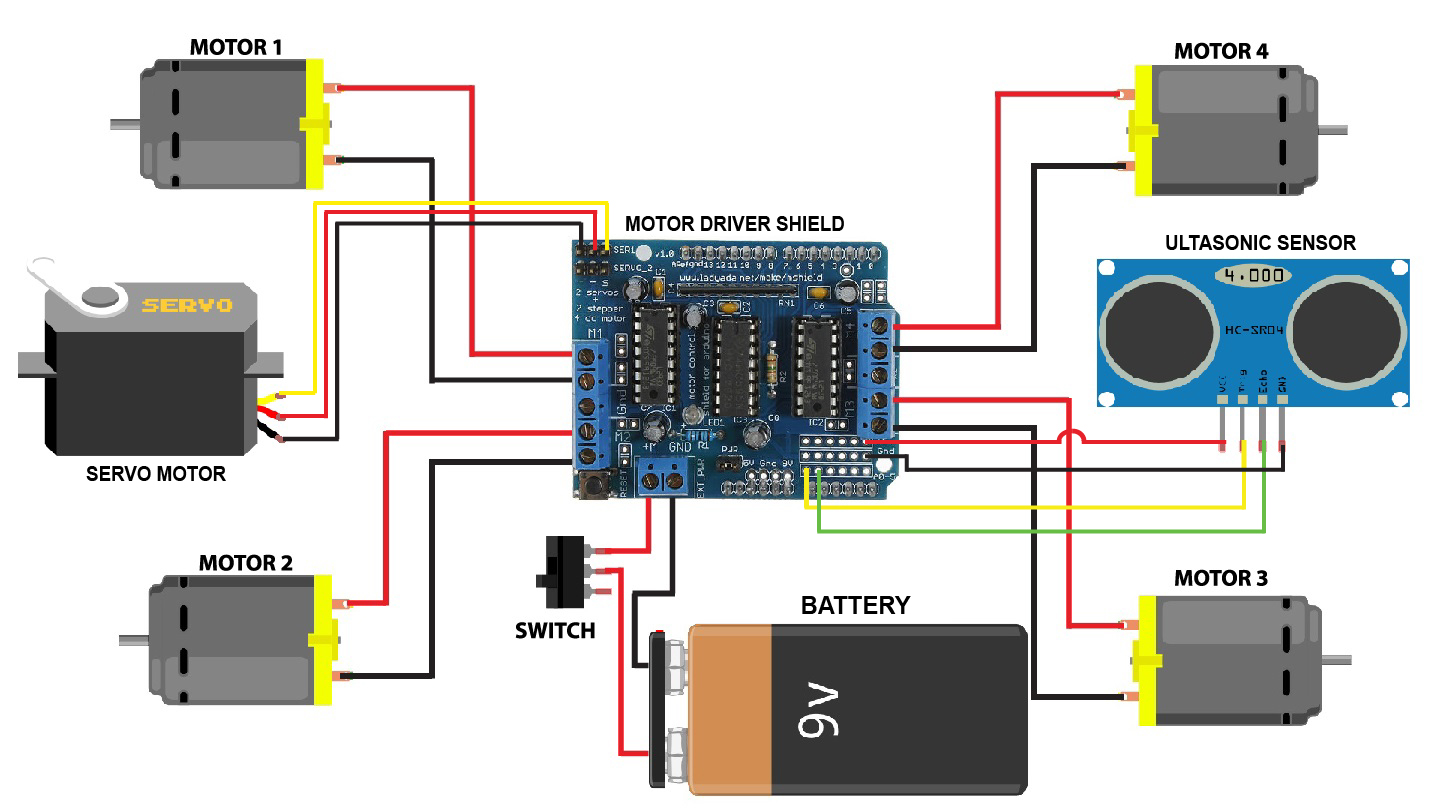
Circuit Diagram
Circuit Diagram
Comments
Only logged in users can leave comments