Connecting BlueBus Technology photocells to Arduino
Let Arduino pilot photocells and other home automation sensors connected via the BlueBus Technology.
Components and supplies
1
Resistor 1k ohm
1
Resistor 4.7 ohm
1
Arduino Mega 2560
1
Arduino UNO
1
Resistor 10k ohm
1
Breadboard (generic)
1
General Purpose Transistor PNP
1
Test Accessory, AC Power Adaptor
1
MOSFET Transistor, Switching
Apps and platforms
1
Arduino IDE
Project description
Code
bluebus.ino
c_cpp
INO file to open in the Arduino IDE
1/* Project: BlueBus 2 * Date : 2022-10-31 3 * Author : Serge 4 */ 5 6//============================================================================================ 7// BB module 8//============================================================================================ 9 10// OC2B, on MEGA2560 : PH6 = D9 11// OC2B, on UNO : PD3 = D3 12#if defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) 13#define OC2B 9 /* Arduino Mega */ 14#elif defined(__AVR_ATmega644P__) || defined(__AVR_ATmega644__) 15#define OC2B 14 /* Sanguino */ 16#else 17#define OC2B 3 /* Arduino Duemilanove, Diecimila, LilyPad, etc */ 18#endif 19 20// digitalWrite(OC2B, LOW); => MOSFET blocked => both bus lines pulled up to +Vin => 0V on the bus (active signal) 21#define BB_ACTIVE LOW // MOSFET blocked 22 23// digitalWrite(OC2B, HIGH); => MOSFET conducting => 1 bus line connected to GND => Vin on the Bus (idle) 24#define BB_IDLE HIGH // MOSFET conducting 25 26byte BB_in; // port number for reading the bus 27volatile byte BB_reco = 0; // trigger recognition phase 28byte BB_addr; // current addr being scanned 29 30#define BB_EVENTS 32 // max number of events waiting in the queue 31typedef struct { 32 byte evt; 33 unsigned long timestamp; 34 byte addr; 35 byte status; 36} BB_Event; 37volatile BB_Event BB_events[BB_EVENTS]; // event queue 38BB_Event BB_event; // one event 39volatile byte BB_event_in = 0; // index of next event to write to the queue 40volatile byte BB_event_out = 0; // index of next event to read from the queue 41 42// presence of devices on the bus, updated by the recognition phase 43byte BB_device[16] = { 44 false, true, false, false, false, false, false, false, // device #1 is always scanned 45 false, false, false, false, false, false, false, false, 46}; 47 48// last status of each device (0xff = no answer) 49byte BB_status[16] = { 50 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 51 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 52}; 53 54void BB_init(byte in); // initialize and use port "in" to read the bus status 55void BB_on(); // activate the bus, querying devices 56void BB_idle(); // power the bus, but don't query any device 57void BB_off(); // power off the bus 58void BB_recognition(); // initiate the recognition phase 59BB_Event* BB_event_pop(); // get next event 60void BB_event_push(byte reply); // add new event to queue (called by ISR) 61 62// called by ISR in case of status change on a device 63void BB_event_push(byte reply) { 64 byte status; 65 66 if (reply==0 || reply==0xff) { 67 status = 0xff; 68 } else { 69 status = ((reply ^ (reply>>4) ^ BB_addr) & 0b1111); 70 if (!BB_device[BB_addr]) { 71 BB_device[BB_addr] = true; 72 BB_status[BB_addr] = 0xff; 73 } 74 } 75 if (status != BB_status[BB_addr]) { 76 volatile BB_Event* e; 77 BB_status[BB_addr] = status; 78 e = &BB_events[BB_event_in]; 79 e->evt = true; 80 e->timestamp = micros(); 81 e->addr = BB_addr; 82 e->status = status; 83 if (BB_event_in>=BB_EVENTS-1) { 84 BB_event_in = 0; 85 } else { 86 BB_event_in++; 87 } 88 if (BB_event_in == BB_event_out) { 89 BB_event_pop(); 90 } 91 } 92} 93 94// get next event from the queue 95BB_Event* BB_event_pop() { 96 volatile BB_Event* out; 97 if (BB_event_in == BB_event_out) { 98 BB_event.evt = false; 99 } else { 100 out = &BB_events[BB_event_out]; 101 BB_event.evt = out->evt; 102 BB_event.timestamp = out->timestamp; 103 BB_event.addr = out->addr; 104 BB_event.status = out->status; 105 if (BB_event_out>=BB_EVENTS-1) { 106 BB_event_out = 0; 107 } else { 108 BB_event_out++; 109 } 110 } 111 return &BB_event; 112} 113 114void BB_init(byte in) { 115 116 BB_in = in; // port used for reading the bus 117 pinMode(OC2B, OUTPUT); 118 pinMode(BB_in, INPUT); 119 120 // no power on the bus 121 BB_off(); 122 123 // CPU clock is 16MHz (MEGA2560) 124 // CS2 = 0b101 = clock divided by 128 125 // TCNT incremented every 8µs (128/16M = 8µ) 126 TCCR2B &= 0xff ^ (_BV(CS22) | _BV(CS21) | _BV(CS20)) ; 127 TCCR2B |= _BV(CS22) | _BV(CS20) ; 128 129 // EXCLK = 0, internal clock 130 ASSR &= 0xff ^ _BV(EXCLK); 131 132 // AS2 = 0, asynchrone mode 133 ASSR &= 0xff ^ _BV(AS2); 134 135 // COM2A = COM2B = 00 : normal port operation 136 TCCR2A &= 0xff ^ (_BV(COM2A1) | _BV(COM2A0) | _BV(COM2B1) | _BV(COM2B0)); 137 138 // COM2B = 11 : inverted output (LOW at start, HIGH when OCR2B is reached 139#define BB_ACTIVATE_SIGNAL() TCCR2A |= _BV(COM2B1) | _BV(COM2B0); 140 141 // COM2B = 00 : normal port operation 142#define BB_DEACTIVATE_SIGNAL() TCCR2A &= 0xff ^ (_BV(COM2B1) | _BV(COM2B0)); 143 BB_DEACTIVATE_SIGNAL(); 144 145 // WGM2 = 0b111 => fast PWM mode, TOP=OCRA 146 TCCR2A |= (_BV(WGM21) | _BV(WGM20)); 147 TCCR2B |= _BV(WGM22); 148 149// |------------32ms-------------| |------------19-------| 150// |xxxxxxxx0-------16.9ms-------| |xxxxxxxx0-------10---| 151// |xxxxxxxx0yyyyyyyy0---1.8ms---| |xxxxxxxx0yyyyyyyy0-1-| 152// 153// 19-bit frame (8 bits + stop + 8 bits + stop + 1 idle bit) lasting 32ms => 1.68ms/bit => 210 ticks of 8µs 154// very little delay measured before the start of the first bit of yyyyyyyy, about 0.3ms (210/6=35 ticks) 155 156#define BB_FRAME 210 157 OCR2A = BB_FRAME; 158 159// _0.56_ __70__ 160// 1 |___1.1ms___| | |___140___| | 161// 162// ___1.1ms___ ___140___ 163// 0 |_0.56_| | |__70__| | 164// ^ ^ 165// read __| __| 166// 167// Bit 0 transmitted as 1/3 LOW + 2/3 HIGH 168#define BB_BIT0 (BB_FRAME/3) 169// Bit 1 transmitted as 2/3 LOW + 1/3 HIGH 170#define BB_BIT1 ((BB_FRAME/3)*2) 171// middle of a bit for reading its state (+estimated delay for reply to start) 172#define BB_BITR (BB_FRAME/2 + BB_FRAME/6) 173 OCR2B = BB_BITR; 174 175} 176 177#define PARITY(x) (((x) + ((x)>>1) + ((x)>>2) + ((x)>>3) + ((x)>>4) + ((x)>>5) + ((x)>>6) + ((x)>>7)) & 0b1) 178 179// called by ISR to get next BB_addr to query, in recognition phase and in norml operation phase 180byte BB_sequence() { 181 static byte addr = 0; 182 static byte reco_count = 0; 183 byte byteQ; 184 byte flag; 185 186 // normal operation, query each recognized device 187 if (BB_reco==0) { 188 flag = 1; 189 do { 190 addr = (addr+1) & 0b1111; 191 } 192 while (!BB_device[addr]); 193 } 194 195 // start recognition phase, starting with addr #1 196 if (BB_reco==1) { 197 addr = 1; 198 reco_count = 2; 199 BB_reco++; 200 } 201 202 // recognition phase running, test twice each address from 1 to 15 203 if (BB_reco>1) { 204 flag = 0; 205 if (reco_count) { 206 reco_count--; 207 } else { 208 addr++; 209 reco_count = 2; 210 if (addr>15) { 211 BB_reco = 0; 212 addr = 0; 213 } 214 } 215 } 216 217 // data to send : aabcccfp 218 // aa : address extension (0 ?) 219 // b : address modifier (A bridge on the board) 220 // ccc : addr as configured with the jumpers 221 // f : reset flag ? should be 1 for normal operation 222 // p : parity bit 223 BB_addr = addr; 224 byteQ = (addr<<2) | (flag<<1); 225 // set parity bit 226 byteQ ^= PARITY(byteQ); 227 return byteQ; 228} 229 230// Interrupt service routine triggered when TIMER2 reach OCR2B value 231ISR(TIMER2_COMPB_vect) { 232 static byte bit_count = 0; 233 static byte data = 0; 234 235 // ========== send the query ========== 236 // activate timer signal 237 if (bit_count==0) { 238 data = BB_sequence(); 239 BB_ACTIVATE_SIGNAL(); 240 } 241 242 // Q 8bits + stop bit (zero) 243 if (bit_count<9) { 244 OCR2B = (data & _BV(7)) ? BB_BIT1 : BB_BIT0; 245 data <<= 1; 246 } 247 248 // end of byteQ, deactivate 249 if (bit_count==9) { 250 BB_DEACTIVATE_SIGNAL(); 251 OCR2B = BB_BITR; 252 data = 0; 253 } 254 255 // ========== read the status ========== 256 // start to read 8 bits on **next** cycle 257 if (bit_count>=10 && bit_count<18) { 258 data = (data<<1) + (digitalRead(BB_in) ? 0 : 1); 259 } 260 261 // stop bit (should be zero) 262 if (bit_count==18) { 263 BB_event_push(data); 264 } 265 266 // one frame (32ms) = 9+9+1 bits 267 if (bit_count<18) { 268 bit_count++; 269 } else { 270 bit_count = 0; 271 } 272} 273 274void BB_on() { 275 276 // Interrupt on Comparator B only: OCIE2B=1, OCIE2A=0, TOIE2=0 277 TIMSK2 &= 0xff ^ (_BV(OCIE2A) | _BV(OCIE2B) | _BV(TOIE2)); 278 TIMSK2 |= _BV(OCIE2B); 279 // bus powered 280 digitalWrite(OC2B, BB_IDLE); 281} 282 283void BB_idle() { 284 285 // No interrupt: OCIE2B=0, OCIE2A=0, TOIE2=0 286 TIMSK2 &= 0xff ^ (_BV(OCIE2A) | _BV(OCIE2B) | _BV(TOIE2)); 287 // no query but bus still powered 288 digitalWrite(OC2B, BB_IDLE); 289 290} 291 292void BB_off() { 293 294 // No interrupt: OCIE2B=0, OCIE2A=0, TOIE2=0 295 TIMSK2 &= 0xff ^ (_BV(OCIE2A) | _BV(OCIE2B) | _BV(TOIE2)); 296 // no power on the bus 297 digitalWrite(OC2B, BB_ACTIVE); 298 299} 300 301// initiate recognition phase. It will last about 15*2*32ms = 1 second 302void BB_recognition() { 303 BB_reco = 1; 304} 305 306//============================================================================================ 307 308void setup() { // setup(): put your setup code here, to run once: 309 310 Serial.begin(2e6); 311 Serial.println("\ 312\ 313\ 314\ 315INIT..."); 316 317 pinMode(LED_BUILTIN, OUTPUT); 318 digitalWrite(LED_BUILTIN, HIGH); 319 320 BB_init(3); // read bus on port D3 321 BB_on(); // activate bus and communication 322 delay(1000); // wait for the devices to power-up 323 BB_recognition(); // initiate a recognition phase 324 325 digitalWrite(LED_BUILTIN, LOW); 326 Serial.println("INIT... Completed!"); 327} 328 329void loop() { // loop(): put your main code here, to run repeatedly: 330 331 BB_Event* e; 332 333 while ((e=BB_event_pop())->evt) { 334 Serial.print("Device "); 335 Serial.print(e->addr, HEX); 336 Serial.print(", status "); 337 Serial.print(e->status, HEX); 338 Serial.print(", timestamp "); 339 Serial.println(e->timestamp); 340 digitalWrite(LED_BUILTIN, e->status & 0b0010 ? HIGH : LOW); 341 } 342 delay(200); 343} 344 345
Downloadable files
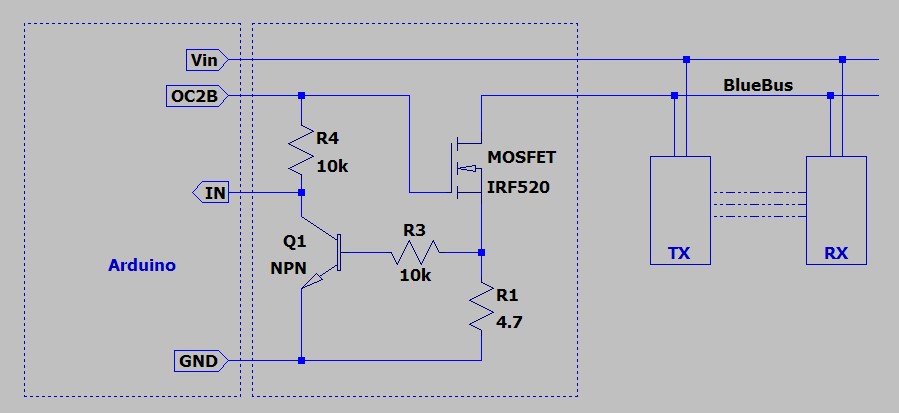
Schematics of the small hardware piece
Schematics of the small hardware piece
Comments
Only logged in users can leave comments