DIY Golf Cart with Bluetooth, Cruise Control, Odometer and Shot Distance Measurement
A reliable, robust, easy to assemble and use Golf Buggy with some unique features.
Devices & Components
2
Arduino Nano
Software & Tools
1
Arduino Bluetooth Control
Project description
Code
BlueTooth Golf Buggy Receiver
cpp
1//Pin 2 is hardware interrupt for hall effect sensor. MUST have input_pullup. 2//Pin 3 is Left motor forward pin 3//Pin 4 is for LED display DI01 (TM1637) 4//Pin 5 is Arduino Rx pin connected to HC-05 Tx pin 5//Pin 6 is Arduino Tx pin connected to HC-05 Rx pin. MUST have voltage divider. 4.7k / 10k resistor series pair from Pin 6 to ground. 6//Pin 7 is for LED display CLK1 7//Pin 9 is Right motor forward pin 8//Pin 10 is Both motor reverse pin. Connect both L pins on H-Bridges to this 9 10#include <TM1637Display.h> //Library for LED display 11#include <SoftwareSerial.h> //Library to allow change of Tx and Rx pins 12#include <PWM.h> //Library to allow changes to default PWM from 500Hz to 15kHz. Motors are noisy at 500Hz 13#include "RTClib.h" // Library fro real time clock module 14#include <Wire.h> 15 16#define rxPin 5 //Defines software serial Arduino Rx pin 17#define txPin 6 //Defines software serial Arduino Tx pin 18#define CLK1 7 //LED clock pin 19#define DIO1 4 //LED data pin 20#define TIME_24_HOUR (true); 21 22RTC_DS3231 rtc; 23 24TM1637Display display1 = TM1637Display(CLK1, DIO1); // Create a display object of type TM1637Display for LED readout 25 26unsigned long eventTime = 0; // Used for timeout safety control 27unsigned long Time = 0; // Same as above 28unsigned long Count = 0; // Used for Shot measurement calcs 29int SpeedL = 0; // Left motor speed 30int SpeedR = 0; // Right motor speed 31int Shot = 0; // Used for Shot measurement calcs 32int shotOn = 0; // Used for Shot measurement calcs 33float Distance = 0; // Used for odometer calcs 34float interruptTime = 0; // Time of interrupt on Pin 2 35float lastInterruptTime = 0; // Time of last interrupt on Pin 2 36bool measureOn = false; // Boolean to initiate Shot measurement calcs 37bool clockOn = false; // Turns clock display on/off 38bool cruiseOn = false; // Boolean variable for cruise control on/off 39float timeDelay = 0; // Main input for cruise control 40float Error = 0; // Cruise control input 41float Setpoint = 0; // Cruise control setpoint 42int Output = 0; // Cruise control output 43float oldError = 0; // Cruise control previous error 44float Kp = 0.1; // Sets proportional gain 45float Ki = 1.0; // Sets integral gain 46float Kd = 0.1; // Sets derivative gain 47float pTerm = 0; // Proprotional correction 48float iTerm = 0; // Integral correction 49float dTerm = 0; // Derivative correction 50float Correction = 0; // Total PID correction 51 52SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin); // Set up a new SoftwareSerial object for HC-05 53 54void setup() { 55 56 pinMode(rxPin, INPUT); // Define pin modes for HC05 Rx 57 pinMode(txPin, OUTPUT); // Define pin modes for HC05 Tx 58 pinMode(3, OUTPUT); // Left Motor Forward 59 pinMode(9, OUTPUT); // Right Motor Forward 60 pinMode(10, OUTPUT); // Both Motors Reverse 61 pinMode(2, INPUT_PULLUP); // Interrupt attached to Hall Effect sensor 62 63 //Check if RTC is connected correctly: 64 if (!rtc.begin()) { 65 while (1); 66 } 67 68 //rtc.adjust(DateTime(2025, 7, 10, 10, 57, 0)); // Adjust clock time if power is lost 69 70 attachInterrupt(digitalPinToInterrupt(2), changed, RISING); // Triggers timing on falling value from Hall Effect sensor 71 72 mySerial.begin(9600); // Set the baud rate for the SoftwareSerial object for HC05 communications 73 74 InitTimersSafe(); // Initialize Arduino timers 1 and 2 to change PWM frequency from 500Hz to 15kHz. 75 SetPinFrequencySafe(3, 15000); // Change PWM refquency to 15000Hz on Pin 3 76 SetPinFrequencySafe(9, 15000); // Change PWM refquency to 15000Hz on Pin 9 77 78 display1.setBrightness(6); // Sets parameters for LED display 79 80 //Serial.begin (115200); 81 82} 83 84void loop() 85{ 86 87 //This section for cruise control 88 89 timeDelay = interruptTime - lastInterruptTime; 90 lastInterruptTime = interruptTime; 91 92 if (timeDelay != 0) { 93 94 //Note,the math relationship between Setpoint and SpeedR on my rig 95 //is the power series (17734 * (SpeedR ^ -1.09)). 96 //Setpoint is therefore a function of the SpeedR selected 97 //You can determine this equation by running various values of SpeedR and measuring the timeDelay for each pulse. 98 //Plot SpeedR against the measured timeDelay on an Excel spreadsheet using X against Y graphics and fit a power curve to the data. 99 //Read off the fitted equation from the graph. 100 101 Setpoint = pow(SpeedR, -1.09); 102 Setpoint = (Setpoint * 17734); 103 104 Error = Setpoint - timeDelay; // Uphill Error is +ve. 105 106 pTerm = (Kp * Error); // Proportional correction 107 iTerm = (Ki * (Error + oldError)); // Integral correction 108 dTerm = (Kd * (Error - oldError)); // Derivative correction 109 110 Correction = (pTerm + iTerm + dTerm); // Total correction 111 112 if (cruiseOn == false) Output = SpeedR; // Output with no PID 113 114 if (cruiseOn == true) Output = (SpeedR - Correction); // Output with PID. Cruise is engaged for an speed above 100 by button 4 115 } 116 117 if (Output > 250) Output = 250; // Limit the output to PWM limits 118 if (Output <= 0) Output = 0; 119 120 if (cruiseOn == true && timeDelay != 0) { // If Cruise Control enabled and the buggy is moving speed will be adjusted using PID output 121 122 pwmWrite (3, Output); 123 pwmWrite (9, Output); 124 } 125 126 if (Error != 0) oldError = Error; 127 128 // This section is Distance calcs 129 130 Distance = (Count * 0.13089); // Calculates distance in metres travelled using pulses recieved. 6 pulses per rev at 0.785398 metres wheel circumference 131 shotOn = (Shot * 0.13089); // Variable for converting magnetic pulses to shot distance 132 133 // This section for what to display on the LED 134 135 if (cruiseOn == false) { 136 display1.showNumberDec(SpeedR, false, 3, 1); 137 } 138 139 if (cruiseOn == true) { 140 display1.showNumberDec(Output, false, 3, 1); 141 } 142 143 if (clockOn == true && SpeedR == 0) { 144 145 display1.clear(); 146 display1.showNumberDec(shotOn, false, 3, 1); 147 delay(2000); 148 display1.clear(); 149 150 display1.showNumberDec(Distance, false, 4, 0); 151 delay (2000); 152 display1.clear(); 153 154 DateTime now = rtc.now();// Get current date and time: 155 int displaytime = (now.hour() * 100) + now.minute(); // Create time format to display: 156 display1.showNumberDecEx(displaytime, 0b11100000, false); // Display the current time in 24 hour format with leading zeros enabled and a center colon: 157 delay (2000); 158 clockOn = false; 159 display1.clear(); 160 } 161 162 //This section initiates automatic timeout and stop if connection is lost. Continuous "G" is sent by Tx and if lost for 5 seconds then auto stop. 163 164 Time = millis() - eventTime; //measures time from last G character received. 165 166 if (Time > 5000) 167 { 168 // Stop everything if bluetooth is lost 169 SpeedL = 0; 170 SpeedR = 0; 171 pwmWrite (3, SpeedL); 172 pwmWrite (9, SpeedR); 173 pwmWrite (10, 0); 174 } 175/* 176 if (timeDelay != 0) { 177 Serial.print ( " timeDelay " ); 178 Serial.print (timeDelay); 179 Serial.print ( " SpeedR " ); 180 Serial.print (SpeedR); 181 Serial.print ( " Setpoint " ); 182 Serial.print (Setpoint); 183 Serial.print ( " Correction " ); 184 Serial.print (Correction); 185 Serial.print ( " Output " ); 186 Serial.println (Output); 187 } 188*/ 189 190 191 char data; // Data is the variable for the code coming from HC-05 192 193 if (mySerial.available() > 0) // If HC-05 is connected 194 195 { 196 char data = mySerial.read(); // Read the data received from the bluetooth module 197 198 switch (data) // Starts the switch function if data is available 199 { 200 201 case 'G': //Reset timeout. Received every second to ensure communications 202 eventTime = millis(); 203 break; 204 205 case '1': //Turn Left 206 pwmWrite(10, 0); //stop reverse pin output 207 pwmWrite(3, 0); //Stop left motor 208 pwmWrite(9, 250); //Full power right motor 209 delay(300); //left turn for 300 milliseconds 210 pwmWrite (3, SpeedL); //Restore to original speed 211 pwmWrite (9, SpeedR); //Restore to original speed 212 break; 213 214 case '2': //Go faster 215 cruiseOn = false; //Disable cruise control 216 pwmWrite(10, 0); //Stop reverse pin output 217 SpeedL = (SpeedL + 10); //Increase speed by 10% each press 218 SpeedR = (SpeedR + 10); //Increase speed by 10% each press 219 if (SpeedL < 100) SpeedL = 100; // Skip the first few speed steps 220 if (SpeedR < 100) SpeedR = 100; // Skip the first few speed steps 221 pwmWrite(3, SpeedL); //Send speed setting to left motor 222 pwmWrite(9, SpeedR); //Send speed setting to right motor 223 break; 224 225 case '3': //Turn Right 226 pwmWrite(10, 0); //Stop reverse pin output 227 pwmWrite(9, 0); //Stop right motor 228 pwmWrite(3, 250); //Full power left motor 229 delay (300); //Right turn for 300 milliseconds 230 pwmWrite (9, SpeedR); //return to original speed 231 pwmWrite (3, SpeedL); //return to original speed 232 break; 233 234 case '4': 235 if (cruiseOn) { 236 cruiseOn = false; // Toggle to false. If its on, turn it off 237 } 238 else { 239 cruiseOn = true; // Toggle to true. If its off, turn it on 240 } 241 break; 242 243 case '5': 244 SpeedR = 120; 245 SpeedL = 120; 246 pwmWrite(10, 0); //stop reverse pin output 247 pwmWrite (9, 100); //Send speed setting to right motor 248 pwmWrite (3, 100); //Send speed setting to left motor 249 pwmWrite (9, 120); //Send speed setting to right motor 250 pwmWrite (3, 120); //Send speed setting to left motor 251 cruiseOn = true; //Enable cruise control 252 break; 253 254 case '6': 255 SpeedR = 130; 256 SpeedL = 130; 257 pwmWrite(10, 0); //stop reverse pin output 258 pwmWrite (9, 100); //Send speed setting to right motor 259 pwmWrite (3, 100); //Send speed setting to left motor 260 pwmWrite (9, 130); //Send speed setting to right motor 261 pwmWrite (3, 130); //Send speed setting to left motor 262 cruiseOn = true; //Enable cruise control 263 break; 264 265 case '7': 266 SpeedR = 140; 267 SpeedL = 140; 268 pwmWrite(10, 0); //stop reverse pin output 269 pwmWrite (9, 100); //Send speed setting to right motor 270 pwmWrite (3, 100); //Send speed setting to left motor 271 pwmWrite (9, 140); //Send speed setting to right motor 272 pwmWrite (3, 140); //Send speed setting to left motor 273 cruiseOn = true; //Enable cruise control 274 break; 275 276 case '8': 277 cruiseOn = false; //Disable cruise control 278 pwmWrite(10, 0); //stop reverse pin output 279 SpeedL = (SpeedL - 10); //Go slower, decrease speed by 10% each press 280 SpeedR = (SpeedR - 10); //Go slower, decrease speed by 10% each press 281 pwmWrite(3, SpeedL); //Send speed setting to left motor 282 pwmWrite(9, SpeedR); //Send speed setting to right motor 283 break; 284 285 case '9': //reset distance counter for shot measurement 286 if (measureOn) { 287 measureOn = false; // Toggle to false. If its on, turn it off 288 } 289 else { 290 measureOn = true; // Toggle to true. If its off, turn it on 291 } 292 Shot = 0; 293 break; 294 295 296 case '0': // Display shot and distance measurements then current time 297 if (clockOn) { 298 clockOn = false; // Toggle to false. If its on, turn it off 299 } 300 else { 301 clockOn = true; // Toggle to true. If its off, turn it on 302 } 303 break; 304 305 case '#': //Reverse 306 cruiseOn = false; //Disable cruise control 307 pwmWrite (3, 0); //Stop forward pin output 308 pwmWrite (9, 0); //Stop forward pin output 309 SpeedL = 0; //Both motors stop 310 SpeedR = 0; //Both motors stop 311 delay (200); //Give the buggy time to stop 312 pwmWrite(10, 120); //Drive both motors reverse 313 break; 314 315 case '*': //Stop 316 cruiseOn = false; //Disable cruise control 317 pwmWrite(10, 0); //Stop reverse pin output 318 SpeedL = 0; //Both motors stop 319 SpeedR = 0; //Both motors stop 320 Output = 0; 321 pwmWrite (9, SpeedR); 322 pwmWrite (3, SpeedL); 323 break; 324 325 default : break; 326 } 327 } 328} 329 330// Calls the time an interrupt occured on pin 2 331void changed() { 332 Count = ++ Count; // Counts pulses for odometer. Increment count by one each pulse 333 Shot = ++ Shot; // Counts pulses for shot measurement. Increment count by one each pulse 334 interruptTime = (millis()); //Time of interrupt 335}
BlueTooth Golf Buggy Tx Code
cpp
1//Bluetooth Golf Buggy Transmitter Code 2 3 4#include <SoftwareSerial.h> 5#include <Keypad.h> 6 7SoftwareSerial B(11,10); // Sets HC-05 connection pins. 11 = HC-05 Tx, 10 = HC-05 Rx 8 9//Slave HC-05 code (5856,00,00EEFB) 10 11unsigned long startTime = 0; //Variable time for 1 second time interval for transmission of connection check character G 12const long interval = 1000; //Constant for 1 second time interval for transmission of connection check character G 13const int txPin = 10; 14 15const byte ROWS = 4; //four rows 16const byte COLS = 3; //four columns 17char keys[ROWS][COLS] = { 18 {'1','2','3'}, 19 {'4','5','6'}, 20 {'7','8','9'}, 21 {'*','0','#'} 22}; 23 24byte rowPins[ROWS] = {9, 8, 7, 6}; //connect to the row pinouts of the keypad 25byte colPins[COLS] = {5, 4, 3}; //connect to the column pinouts of the keypad 26 27 28 //1=5,2=4,3=3,4=2,5=9,6=8,7=7,8=6,10=HC Rx,11=HC Tx. 29 30 31Keypad keypad = Keypad( makeKeymap(keys), rowPins, colPins, ROWS, COLS ); 32 33void setup() 34{ 35 36 pinMode (10, OUTPUT); //HC-05 Rx 37 pinMode (11, INPUT); //HC-05 Tx 38 Serial.begin(9600); 39 B.begin(9600); //Required for HC-05 serial port 40} 41 42void loop(){ 43 char key = keypad.getKey(); 44 45 if (key){ 46 Serial.println(key); 47 B.println (key); 48 //delay(100); 49 } 50 51 // Next lines for transmission every second to test comms connection. Rx stops all movement after 5 seconds if not receiving G 52 53 unsigned long onTime = millis();//Sets variable onTime to current time 54 55 if (onTime >= startTime + interval) //Tests if onTime is greater than variable time (startTime) plus transmission interval (1000ms) 56 { 57 txPin == HIGH; 58 Serial.println ("G"); 59 B.println ("G");//Sends G 60 startTime = millis();//Resets variable time to current time 61 txPin == LOW; 62 } 63 64}
Downloadable files
Buggy Rx Schematic
New schematic with RTC connections shown.
Schematic_Buggy-Rx-1_2026-03-18.pdf
Documentation
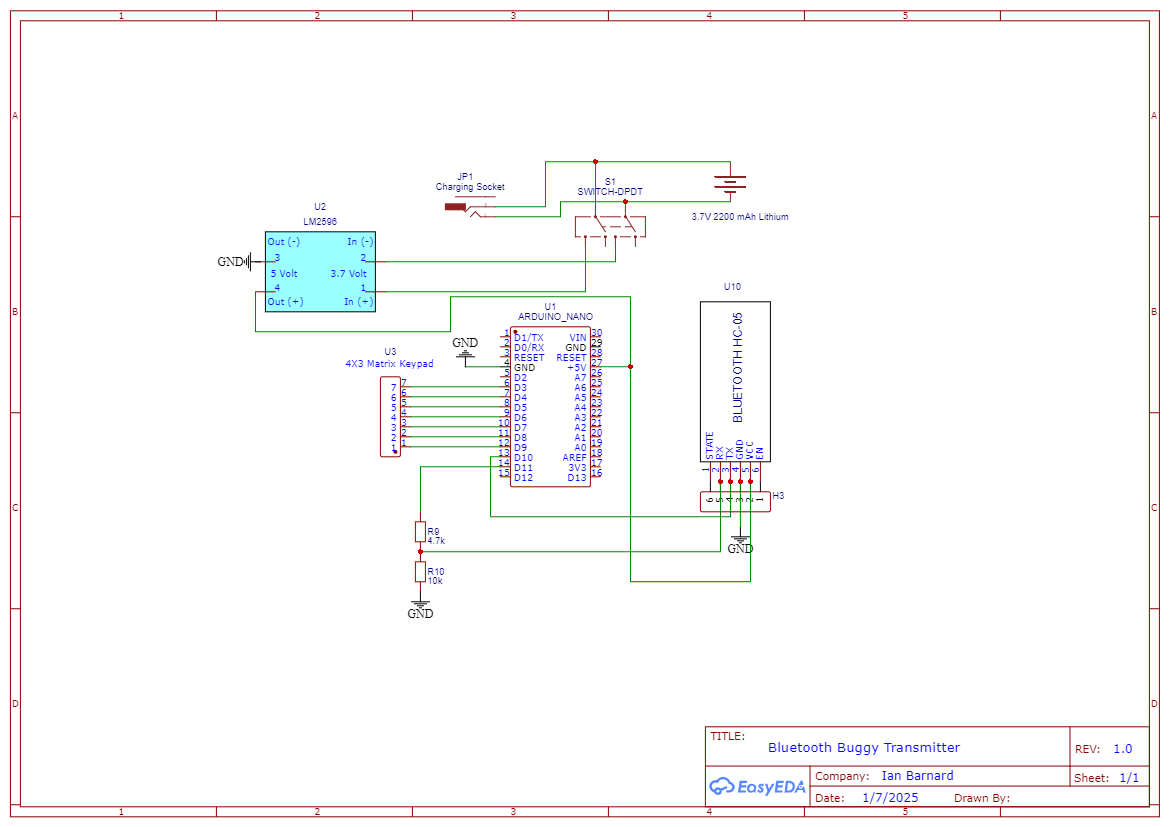
Bluetooh Buggy Transmitter
Schematic_Buggy-TX-PCB-1_2025-07-01.png
Comments
Only logged in users can leave comments