Ultrasonic Sensor Project with Arduino UNO Q
Easy DIY Project with Arduino UNO Q If you’re starting with the new Arduino UNO Q and wondering what your first real project should be ? this one is perfect.
Devices & Components
1
Robu Jumper wires
1
Robu's Arduino UNO Q
1
Robu's Type - C Cable
1
Robu's UNO Q Power Supply
1
Robu's SG90 Servo Motor
1
Robu's Ultrasonic sensor
1
Robu Breadboard
Software & Tools
Arduino App Lab
Project description
Code
Arduino Radar Python code
python
main.py file
Arduino Radar HTML code
markup
index.html file
Arduino Radar CSS code
css
style.css file
Arduino Radar CPP code
cpp
Sketch.ion file
Arduino Radar JS code
js
app.js file
Downloadable files
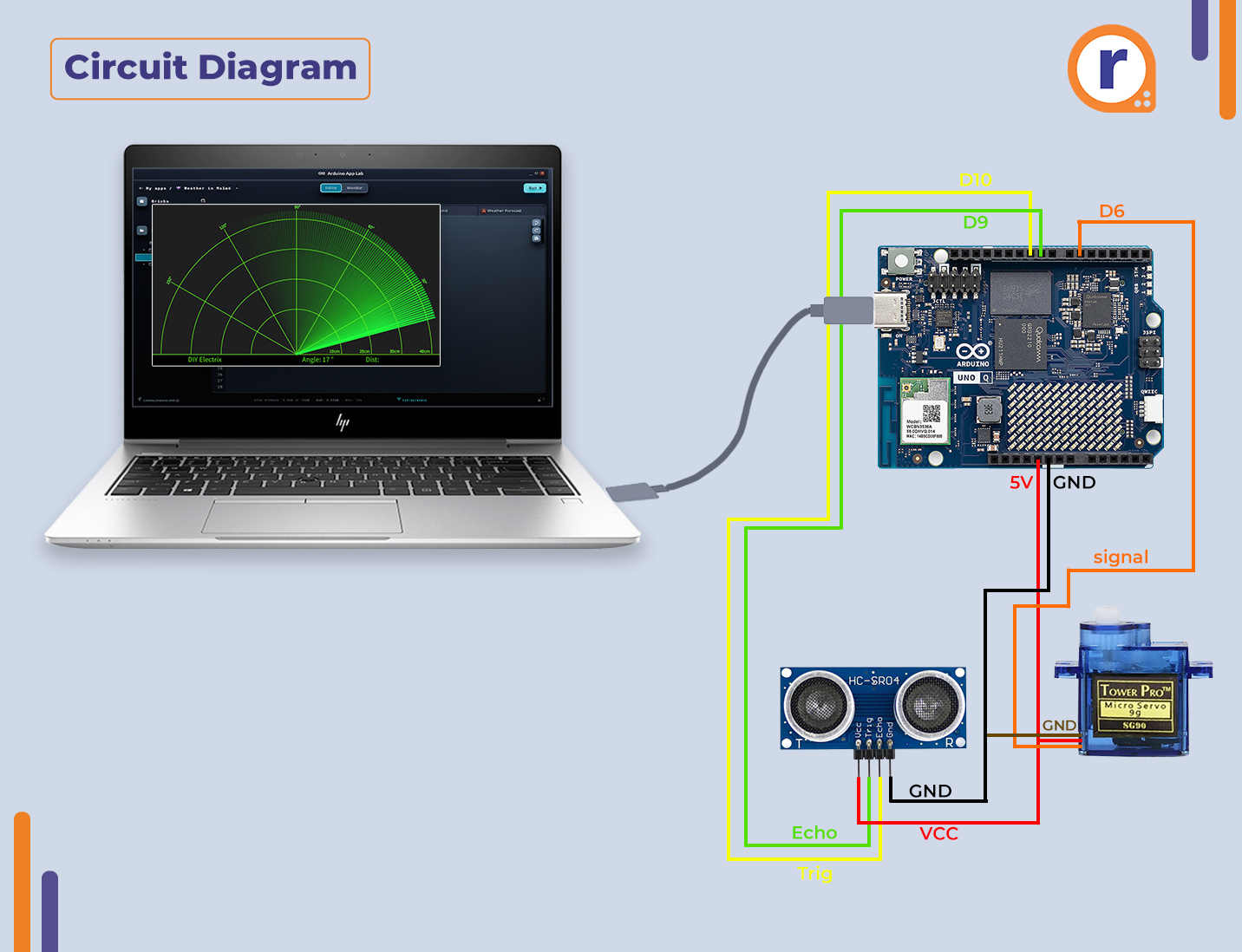
Arduino UNO Q Radar Circuit Diagram
Arduino-Uno-Q 14.jpg
Comments
Only logged in users can leave comments