How to make a *Obstacle Avoiding* Car with LiDAR Sensor
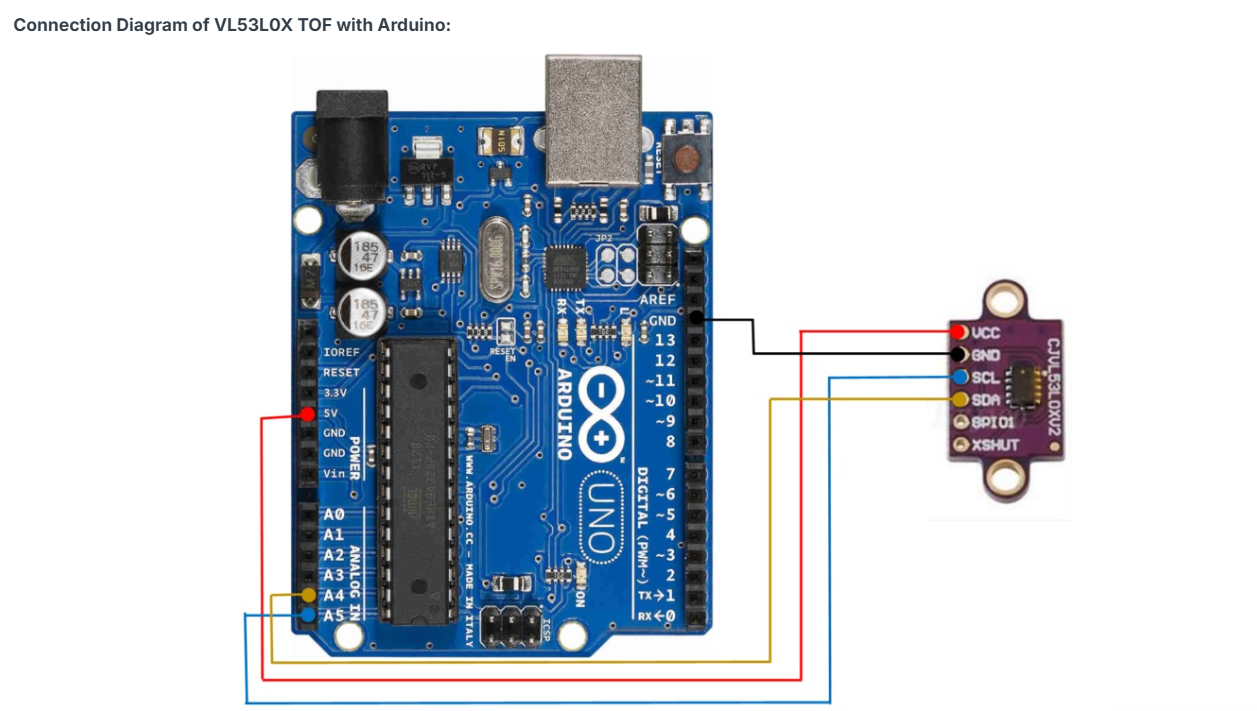
This Obstacle Avoiding Car project leverages advanced sensing and mobility to create an autonomous robot capable of navigating complex environments. The core of this smart car is an Arduino Uno microcontroller, which processes sensor data and controls vehicle movement. For precise distance detection, the project utilizes the VL53L0X TOF Based LiDAR Laser Distance Sensor.
Devices & Components
1
Arduino Uno Rev3
Software & Tools
Arduino IDE
Project description
Code
Obstacle Avoiding Car with LiDAR Sensor Code
1// LiDAR based Autonomous car || Obstacle Avoiding 2// Created By roboattic Lab 3// Contact me here https://www.instagram.com/roboattic_lab/ 4 5#include <AFMotor.h> 6#include <Adafruit_VL53L0X.h> 7#include <Wire.h> 8 9#define MAX_DISTANCE 200 10#define MAX_SPEED 190 11#define MAX_SPEED_OFFSET 20 12 13AF_DCMotor motor1(1, MOTOR12_1KHZ); 14AF_DCMotor motor2(2, MOTOR12_1KHZ); 15AF_DCMotor motor3(3, MOTOR34_1KHZ); 16AF_DCMotor motor4(4, MOTOR34_1KHZ); 17 18Adafruit_VL53L0X lox = Adafruit_VL53L0X(); 19 20boolean goesForward = false; 21int distance = 100; 22int speedSet = 0; 23 24void setup() { 25 26 Serial.begin(115200); 27 delay(10); 28 Serial.println("VL53L0X test"); 29 30 // Initialize I2C 31 Wire.begin(); 32 33 // Add this to setup() before lox.begin() to scan for devices 34 Serial.println("Scanning I2C bus..."); 35 for (byte i = 8; i < 120; i++) { 36 Wire.beginTransmission(i); 37 if (Wire.endTransmission() == 0) { 38 Serial.print("Found device at address: 0x"); 39 Serial.println(i, HEX); 40 } 41 } 42 43 // Try to initialize the VL53L0X (only call begin() once) 44 if (!lox.begin()) { 45 Serial.println("Failed to find VL53L0X sensor. Check wiring!"); 46 while (1) 47 ; // Stop execution if sensor not found 48 } 49 Serial.println("VL53L0X initialized successfully."); 50} 51 52void loop() { 53 54 VL53L0X_RangingMeasurementData_t measure; 55 56 lox.rangingTest(&measure, false); 57 58 if (measure.RangeStatus == 4) { 59 Serial.println("Out of range"); 60 } else { 61 distance = measure.RangeMilliMeter / 10; 62 } 63 64 // Print the distance to the serial monitor (for debugging) 65 Serial.print("Distance: "); 66 Serial.print(distance); 67 Serial.println(" cm"); 68 69 70 int distanceR = 0; 71 int distanceL = 0; 72 delay(40); 73 74 if (distance <= 15) { 75 moveStop(); 76 delay(100); 77 moveBackward(); 78 delay(300); 79 moveStop(); 80 delay(200); 81 distanceR = lookRight(); 82 delay(200); 83 distanceL = lookLeft(); 84 delay(200); 85 86 if (distanceR >= distanceL) { 87 turnRight(); 88 moveStop(); 89 } else { 90 turnLeft(); 91 moveStop(); 92 } 93 } else { 94 moveForward(); 95 } 96} 97 98int lookRight() { 99 rotateRight(); 100 delay(500); 101 VL53L0X_RangingMeasurementData_t measure; 102 103 lox.rangingTest(&measure, false); 104 105 if (measure.RangeStatus == 4) { 106 Serial.println("Out of range"); 107 } else { 108 distance = measure.RangeMilliMeter / 10; 109 } 110 delay(500); 111 rotateLeft(); 112 return distance; 113 delay(100); 114} 115 116int lookLeft() { 117 rotateLeft(); 118 delay(500); 119 VL53L0X_RangingMeasurementData_t measure; 120 121 lox.rangingTest(&measure, false); 122 123 if (measure.RangeStatus == 4) { 124 Serial.println("Out of range"); 125 } else { 126 distance = measure.RangeMilliMeter / 10; 127 } 128 delay(500); 129 rotateRight(); 130 return distance; 131 delay(100); 132} 133 134 135void moveStop() { 136 motor1.run(RELEASE); 137 motor2.run(RELEASE); 138 motor3.run(RELEASE); 139 motor4.run(RELEASE); 140} 141 142void moveForward() { 143 144 if (!goesForward) { 145 goesForward = true; 146 motor1.run(FORWARD); 147 motor2.run(FORWARD); 148 motor3.run(FORWARD); 149 motor4.run(FORWARD); 150 for (speedSet = 0; speedSet < MAX_SPEED; speedSet += 2) // slowly bring the speed up to avoid loading down the batteries too quickly 151 { 152 motor1.setSpeed(speedSet); 153 motor2.setSpeed(speedSet); 154 motor3.setSpeed(speedSet); 155 motor4.setSpeed(speedSet); 156 delay(5); 157 } 158 } 159} 160 161void moveBackward() { 162 goesForward = false; 163 motor1.run(BACKWARD); 164 motor2.run(BACKWARD); 165 motor3.run(BACKWARD); 166 motor4.run(BACKWARD); 167 for (speedSet = 0; speedSet < MAX_SPEED; speedSet += 2) // slowly bring the speed up to avoid loading down the batteries too quickly 168 { 169 motor1.setSpeed(speedSet); 170 motor2.setSpeed(speedSet); 171 motor3.setSpeed(speedSet); 172 motor4.setSpeed(speedSet); 173 delay(5); 174 } 175} 176 177void turnRight() { 178 motor1.run(FORWARD); 179 motor2.run(FORWARD); 180 motor3.run(BACKWARD); 181 motor4.run(BACKWARD); 182 delay(500); 183 motor1.run(FORWARD); 184 motor2.run(FORWARD); 185 motor3.run(FORWARD); 186 motor4.run(FORWARD); 187} 188 189void turnLeft() { 190 motor1.run(BACKWARD); 191 motor2.run(BACKWARD); 192 motor3.run(FORWARD); 193 motor4.run(FORWARD); 194 delay(500); 195 motor1.run(FORWARD); 196 motor2.run(FORWARD); 197 motor3.run(FORWARD); 198 motor4.run(FORWARD); 199} 200 201 202void rotateLeft() { 203 motor2.run(FORWARD); 204 motor1.run(FORWARD); 205 motor4.run(BACKWARD); 206 motor3.run(BACKWARD); 207} 208void rotateRight() { 209 motor2.run(BACKWARD); 210 motor1.run(BACKWARD); 211 motor4.run(FORWARD); 212 motor3.run(FORWARD); 213}
Downloadable files
Circuit Diagram
Screenshot 2025-06-05 121430.png
Comments
Only logged in users can leave comments