2 Animatronic eyeballs with up & down motions!
Code and instructions all included!
Components and supplies
1
The Old Duponts
1
Metal For Brackets
2
Styrofoam Ball
1
SG90 SERVO PACK
1
30v and 10a Power Supply
1
Cardboard For Projects
1
Breadboard for Projects
1
Arduino Uno Rev3
Apps and platforms
1
Arduino IDE
Project description
Code
4 Servo Eye Demo
cpp
Downloadable files
SETUP AND DEMO
A side video for everyone to see. Slow down or pau
2659dc5a-306a-44ac-9b17-53cb0ff2ee99.mp4
Documentation
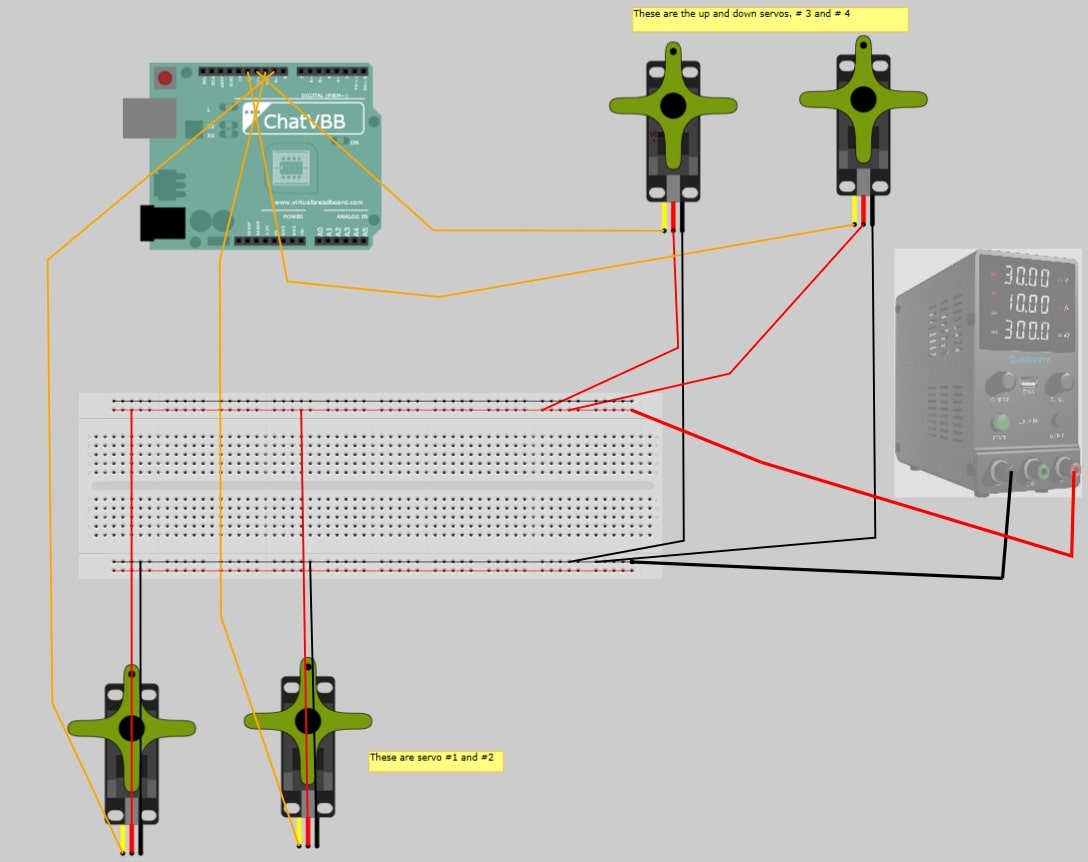
WIRING DIAGRAM
1bb7c5a9-4acb-45d1-a34c-47a2965b5e29.jpg
Comments
Only logged in users can leave comments