Devices & Components
1
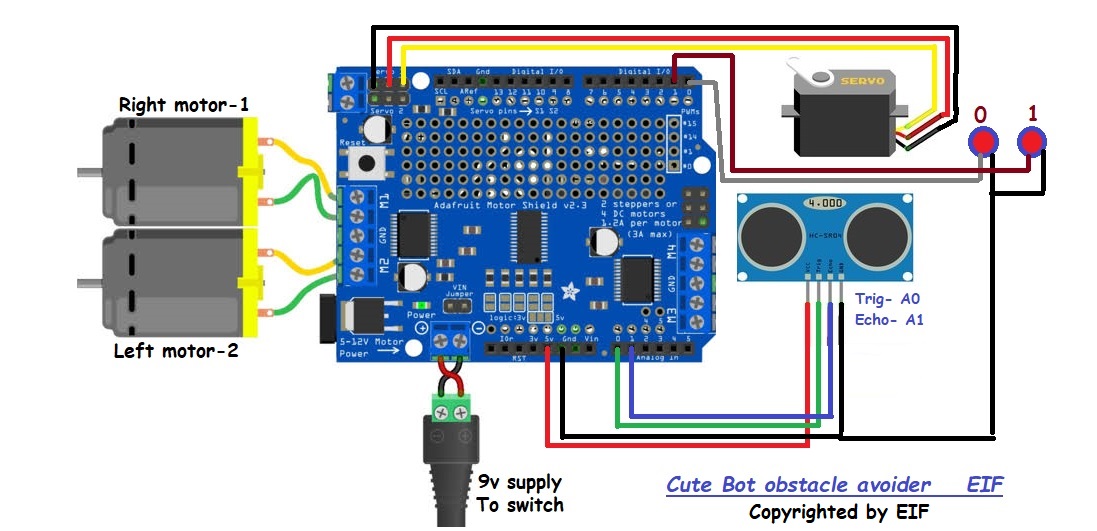
Arduino Uno Rev3
1
Ultrasonic Sensor - HC-SR04 (Generic)
1
SG90 Micro-servo motor
1
Development Board, Motor Control Shield
2
Maker Essentials - Micro-motors & Grippy Wheels
1
Jumper wires (generic)
2
LED (generic)
2
DC Motor, 12 V
1
Centre wheel
Hardware & Tools
1
Multitool, Screwdriver
Software & Tools
Arduino IDE
Project description
Code
Code
arduino
Downloadable files
Circuit
Circuit
Circuit
Circuit
Comments
Only logged in users can leave comments