RFID Door Lock (Updated)
It is made to make our lives easier and technological by using RFID card.
Devices & Components
1
Arduino Uno Rev3
1
5 mm LED: Green
1
5 mm LED: Red
1
Breadboard (generic)
1
Buzzer
1
PIR Sensor
1
MFRC522 RFID/NFC Reader
1
SG90 Micro Servo
1
Jumper wires (generic)
1
9V Power Supply
Hardware & Tools
1
Soldering iron (generic)
1
Double sided tape
1
Silicon
Software & Tools
Arduino IDE
Project description
Code
Code
c
Downloadable files
Schematics
Untitled Sketch_bb.png
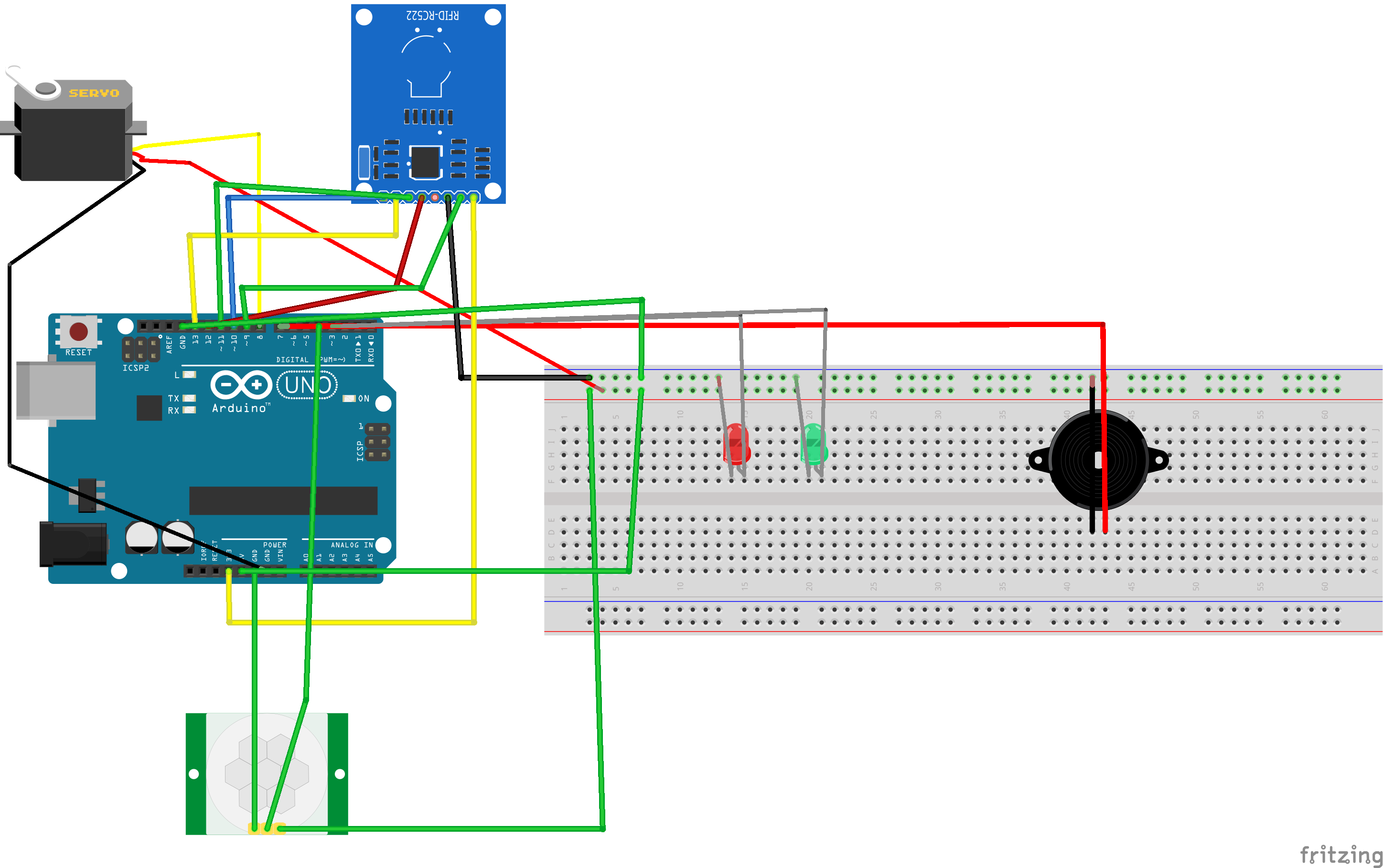
Circuit Diagram
Untitled Sketch_şema.png

Comments
Only logged in users can leave comments