Devices & Components
1
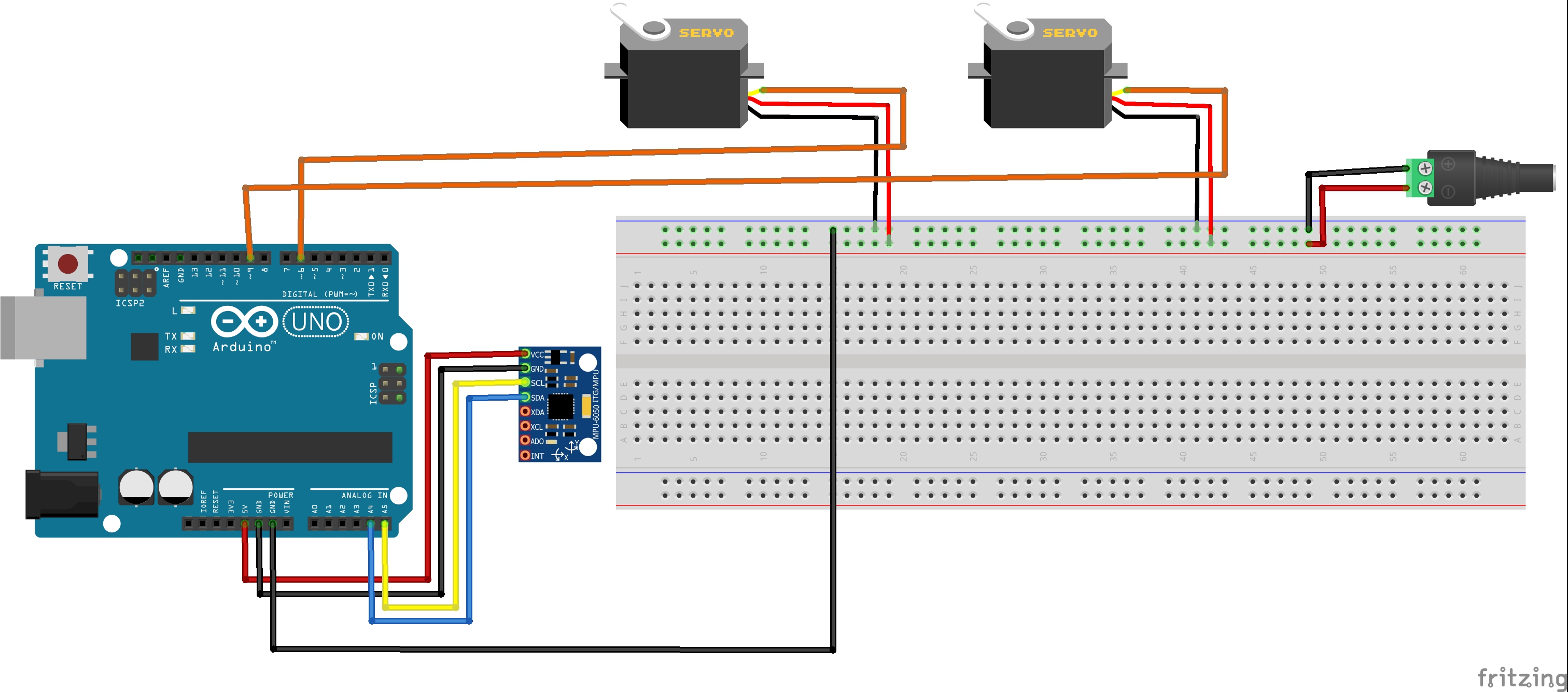
Arduino Uno Rev3
1
Jumper wires (generic)
2
Breadboard (generic)
Project description
Code
Arduino Code
c_cpp
1 2#include <Servo.h> 3#include "I2Cdev.h" 4#include "MPU6050.h" 5#include "HMC5883L.h" 6#include "Wire.h" 7Servo servobase; 8Servo servoelbow; 9int servoPos = 90; // 10int compassCorrection = 0; // set to 0 (not used) 11static const char LED = 6; 12static const float ACCEL_SENS = 16384.0; // Accel Sensitivity with default +/- 2g scale 13static const float GYRO_SENS = 131.0; // Gyro Sensitivity with default +/- 250 deg/s scale 14HMC5883L mag; 15int16_t mx, my, mz; 16MPU6050 accelgyro ; 17int16_t ax, ay, az ; 18int16_t gx, gy, gz ; 19void setup() 20{ 21boolean state = HIGH; 22unsigned int count = 0; 23Serial.begin(9600); 24 while (!Serial && (count < 30) ) 25 { 26 delay(200); 27 digitalWrite(LED, state); 28 state = !state; 29 count++; 30 } 31 digitalWrite(LED, HIGH); 32 Wire.begin(); 33 accelgyro.initialize(); 34 mag.initialize(); 35} 36void loop() 37{ 38 servobase.attach(9); 39servoelbow.attach(6); 40 static unsigned long ms = 0; 41 static boolean state = HIGH; 42if (millis() - ms > 100) 43 { 44 accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); 45 mag.getHeading(&mx, &my, &mz); 46 float heading = atan2(my, mx); 47 if(heading < 0) heading += 2 * M_PI; 48 float headingDegrees = heading * 180/M_PI; 49 int headingDegreesInteger = headingDegrees; 50if ((headingDegreesInteger - compassCorrection) >= 0) 51 { 52 headingDegreesInteger = headingDegreesInteger - compassCorrection; 53 } 54 else 55 { 56 headingDegreesInteger = headingDegreesInteger - compassCorrection + 360; 57 } 58 if (headingDegreesInteger > 90 && headingDegreesInteger < 270) 59 { 60 if (headingDegreesInteger <= 180) 61 { 62 servoPos = 180; 63 } 64 else 65 { 66 servoPos = 10; 67 } 68 } 69 else 70 { 71 if (headingDegreesInteger <= 90) 72 { 73 servoPos = map(headingDegreesInteger, 0, 90, 85, 10); 74 } 75 else 76 { 77 servoPos = map(headingDegreesInteger,360, 270, 85, 180); //(360,270,85,180) 78 } 79 } 80 servobase.write(servoPos); 81 Serial.println (servoPos); 82 delay(10); 83accelgyro.getMotion6 (&ax, &ay, &az, &gx, &gy, &gz); 84ay = map (ay, -17000, 17000, 0, 180) ; 85Serial.println (180-ay); 86servoelbow.write (180-ay); 87delay(10); 88 ms = millis(); 89 digitalWrite(LED, state); 90 state = !state; 91 } 92}
Arduino Code
c_cpp
1 2#include <Servo.h> 3#include "I2Cdev.h" 4#include "MPU6050.h" 5#include "HMC5883L.h" 6#include "Wire.h" 7Servo servobase; 8Servo servoelbow; 9int servoPos = 90; // 10int compassCorrection = 0; // set to 0 (not used) 11static const char LED = 6; 12static const float ACCEL_SENS = 16384.0; // Accel Sensitivity with default +/- 2g scale 13static const float GYRO_SENS = 131.0; // Gyro Sensitivity with default +/- 250 deg/s scale 14HMC5883L mag; 15int16_t mx, my, mz; 16MPU6050 accelgyro ; 17int16_t ax, ay, az ; 18int16_t gx, gy, gz ; 19void setup() 20{ 21boolean state = HIGH; 22unsigned int count = 0; 23Serial.begin(9600); 24 while (!Serial && (count < 30) ) 25 { 26 delay(200); 27 digitalWrite(LED, state); 28 state = !state; 29 count++; 30 } 31 digitalWrite(LED, HIGH); 32 Wire.begin(); 33 accelgyro.initialize(); 34 mag.initialize(); 35} 36void loop() 37{ 38 servobase.attach(9); 39servoelbow.attach(6); 40 static unsigned long ms = 0; 41 static boolean state = HIGH; 42if (millis() - ms > 100) 43 { 44 accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); 45 mag.getHeading(&mx, &my, &mz); 46 float heading = atan2(my, mx); 47 if(heading < 0) heading += 2 * M_PI; 48 float headingDegrees = heading * 180/M_PI; 49 int headingDegreesInteger = headingDegrees; 50if ((headingDegreesInteger - compassCorrection) >= 0) 51 { 52 headingDegreesInteger = headingDegreesInteger - compassCorrection; 53 } 54 else 55 { 56 headingDegreesInteger = headingDegreesInteger - compassCorrection + 360; 57 } 58 if (headingDegreesInteger > 90 && headingDegreesInteger < 270) 59 { 60 if (headingDegreesInteger <= 180) 61 { 62 servoPos = 180; 63 } 64 else 65 { 66 servoPos = 10; 67 } 68 } 69 else 70 { 71 if (headingDegreesInteger <= 90) 72 { 73 servoPos = map(headingDegreesInteger, 0, 90, 85, 10); 74 } 75 else 76 { 77 servoPos = map(headingDegreesInteger,360, 270, 85, 180); //(360,270,85,180) 78 } 79 } 80 servobase.write(servoPos); 81 Serial.println (servoPos); 82 delay(10); 83accelgyro.getMotion6 (&ax, &ay, &az, &gx, &gy, &gz); 84ay = map (ay, -17000, 17000, 0, 180) ; 85Serial.println (180-ay); 86servoelbow.write (180-ay); 87delay(10); 88 ms = millis(); 89 digitalWrite(LED, state); 90 state = !state; 91 } 92}
Downloadable files
Controlling pan/tilt mechanism with GY-87 IMU module
Controlling pan/tilt mechanism with GY-87 IMU module
Comments
Only logged in users can leave comments