Devices & Components
1
Arduino Nano
1
Ultrasonic Sensor - HC-SR04 (Generic)
1
Breadboard (generic)
3
LED (generic)
10
Male/Male Jumper Wires
3
Resistor 221 ohm
Project description
Code
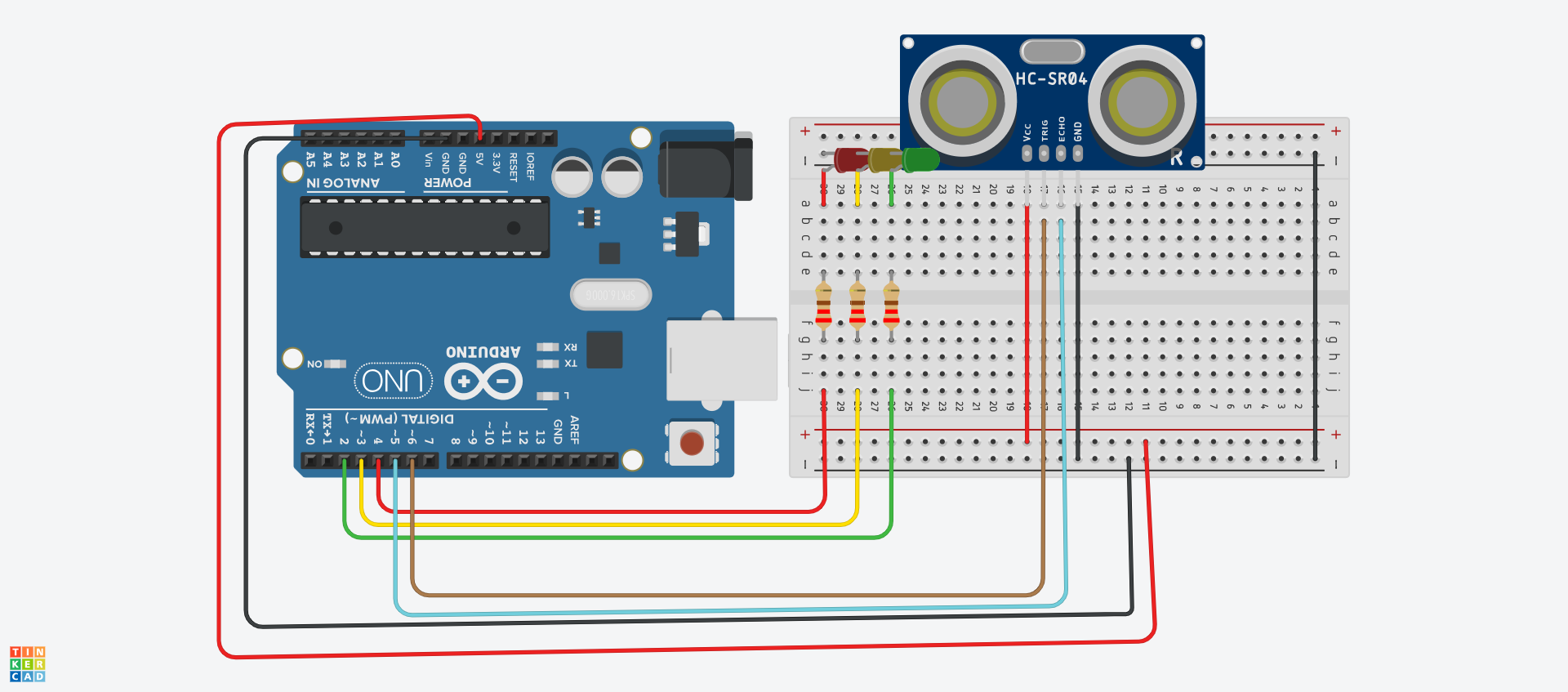
Color Shifting Obstacle Detector Using Ultrasonic Sensor
arduino
The ultrasonic sensor detects objects and lights up Red, Yellow or Green LED based on its position.
Color Shifting Obstacle Detector Using Ultrasonic Sensor
arduino
The ultrasonic sensor detects objects and lights up Red, Yellow or Green LED based on its position.
Downloadable files
untitled
untitled
Comments
Only logged in users can leave comments