Fire Extinguisher Car
This car can be controlled with your mobile via bluetooth module. And can extinguish fire. And arm for controlling the direction of water pipe
Software & Tools
1
Blynk
Project description
Code
Untitled file
c_cpp
1#include <SoftwareSerial.h> 2#include <AFMotor.h> 3int RELAY1 = 8; 4int state1 = 0; 5AF_DCMotor motor1(1); 6AF_DCMotor motor4(3); 7AF_DCMotor motor3(3); 8char bt = 'S'; 9void setup() 10{ 11 Serial.begin(9600); 12 motor1.setSpeed(255); 13 motor3.setSpeed(255); 14 motor4.setSpeed(255); 15 pinMode(RELAY1, OUTPUT); 16 Stop(); 17} 18 19 20void loop() { 21 22 bt = Serial.read(); 23 24 if (bt == 'F') 25 { 26 forward(); 27 } 28 29 if (bt == 'B') 30 { 31 backward(); 32 } 33 34 if (bt == 'L') 35 { 36 left(); 37 } 38 39 if (bt == 'R') 40 { 41 right(); 42 } 43 44 if (bt == 'W') 45 { 46 Stop(); 47 } 48 49 if (bt == 'M'); 50 { 51 pump_ON(); 52 } 53 if (bt == 'm'); 54 { 55 pump_OFF(); 56 } 57 if (bt == 'X') 58 { 59 left_base(); 60 } 61 if (bt == 'Y') 62 { 63 right_base(); 64 } 65} 66void pump_ON() 67{ 68 if (state1 == 0 && bt == 'M')//Pump ON 69 { 70 digitalWrite(RELAY1, HIGH); 71 state1=1; 72 bt=0; 73 } 74} 75void pump_OFF() 76{ 77 if (state1 == 1 && bt == 'm') 78 { 79 digitalWrite(RELAY1, LOW);//PUMP OFF 80 state1=0; 81 bt=0; 82 } 83} 84void forward() 85{ 86 motor1.run(FORWARD); 87 motor3.run(FORWARD); 88} 89 90 91 92void backward() 93{ 94 motor1.run(BACKWARD); 95 motor3.run(BACKWARD); 96} 97 98void left() 99{ 100 motor1.run(FORWARD); 101 motor3.run(BACKWARD); 102} 103void right() 104{ 105 motor1.run(BACKWARD); 106 motor3.run(FORWARD); 107} 108void Stop() 109{ 110 motor1.run(RELEASE); 111 motor3.run(RELEASE); 112 motor4.run(RELEASE); 113} 114void left_base() 115{ 116 motor4.run(FORWARD); 117} 118void right_base() 119{ 120 motor4.run(BACKWARD); 121} 122
Untitled file
c_cpp
1#include <SoftwareSerial.h> 2#include <AFMotor.h> 3int RELAY1 = 8; 4int state1 = 0; 5AF_DCMotor motor1(1); 6AF_DCMotor motor4(3); 7AF_DCMotor motor3(3); 8char bt = 'S'; 9void setup() 10{ 11 Serial.begin(9600); 12 motor1.setSpeed(255); 13 motor3.setSpeed(255); 14 motor4.setSpeed(255); 15 pinMode(RELAY1, OUTPUT); 16 Stop(); 17} 18 19 20void loop() { 21 22 bt = Serial.read(); 23 24 if (bt == 'F') 25 { 26 forward(); 27 } 28 29 if (bt == 'B') 30 { 31 backward(); 32 } 33 34 if (bt == 'L') 35 { 36 left(); 37 } 38 39 if (bt == 'R') 40 { 41 right(); 42 } 43 44 if (bt == 'W') 45 { 46 Stop(); 47 } 48 49 if (bt == 'M'); 50 { 51 pump_ON(); 52 } 53 if (bt == 'm'); 54 { 55 pump_OFF(); 56 } 57 if (bt == 'X') 58 { 59 left_base(); 60 } 61 if (bt == 'Y') 62 { 63 right_base(); 64 } 65} 66void pump_ON() 67{ 68 if (state1 == 0 && bt == 'M')//Pump ON 69 { 70 digitalWrite(RELAY1, HIGH); 71 state1=1; 72 bt=0; 73 } 74} 75void pump_OFF() 76{ 77 if (state1 == 1 && bt == 'm') 78 { 79 digitalWrite(RELAY1, LOW);//PUMP OFF 80 state1=0; 81 bt=0; 82 } 83} 84void forward() 85{ 86 motor1.run(FORWARD); 87 motor3.run(FORWARD); 88} 89 90 91 92void backward() 93{ 94 motor1.run(BACKWARD); 95 motor3.run(BACKWARD); 96} 97 98void left() 99{ 100 motor1.run(FORWARD); 101 motor3.run(BACKWARD); 102} 103void right() 104{ 105 motor1.run(BACKWARD); 106 motor3.run(FORWARD); 107} 108void Stop() 109{ 110 motor1.run(RELEASE); 111 motor3.run(RELEASE); 112 motor4.run(RELEASE); 113} 114void left_base() 115{ 116 motor4.run(FORWARD); 117} 118void right_base() 119{ 120 motor4.run(BACKWARD); 121} 122
Downloadable files
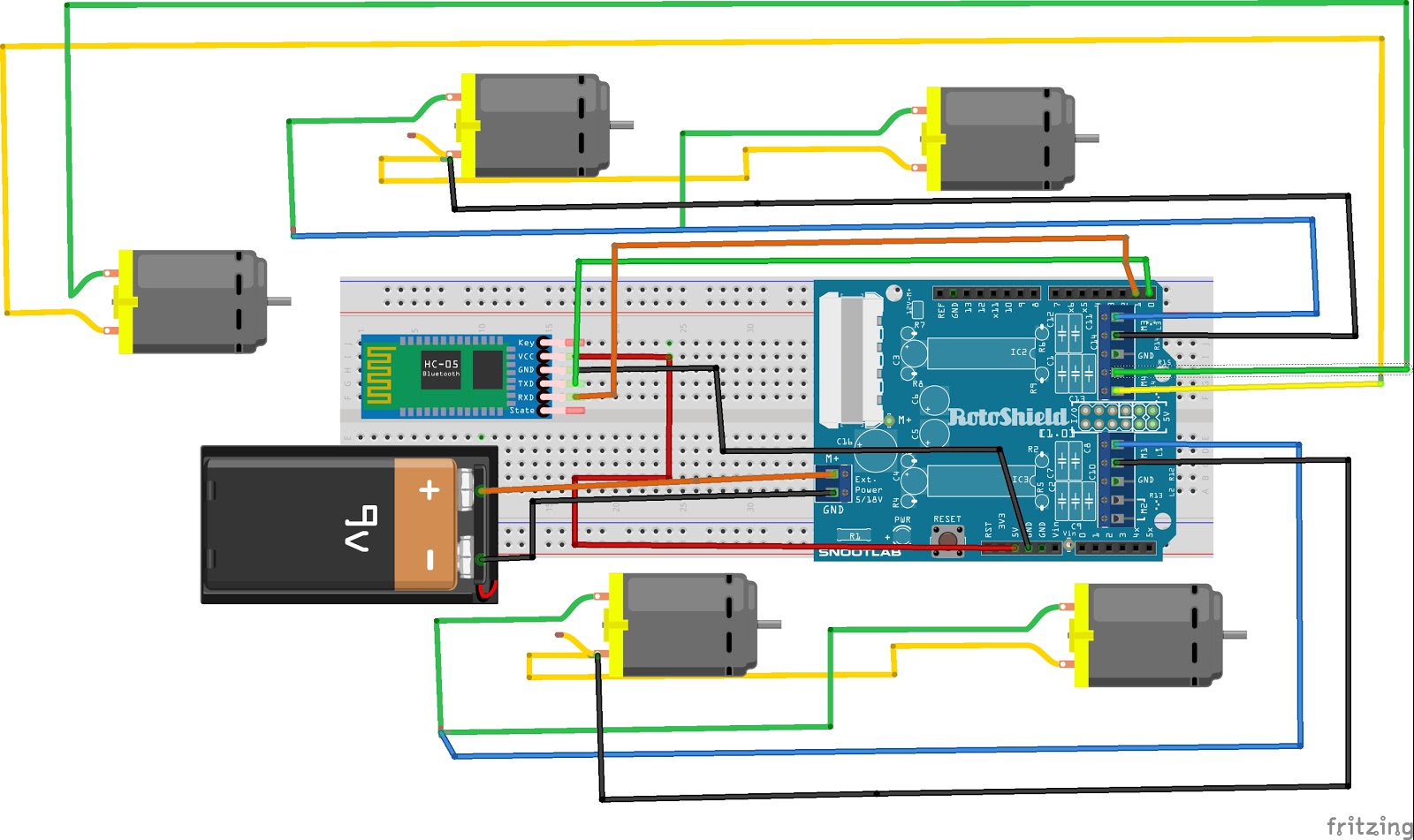
For Controlling Motions
For Controlling Motions
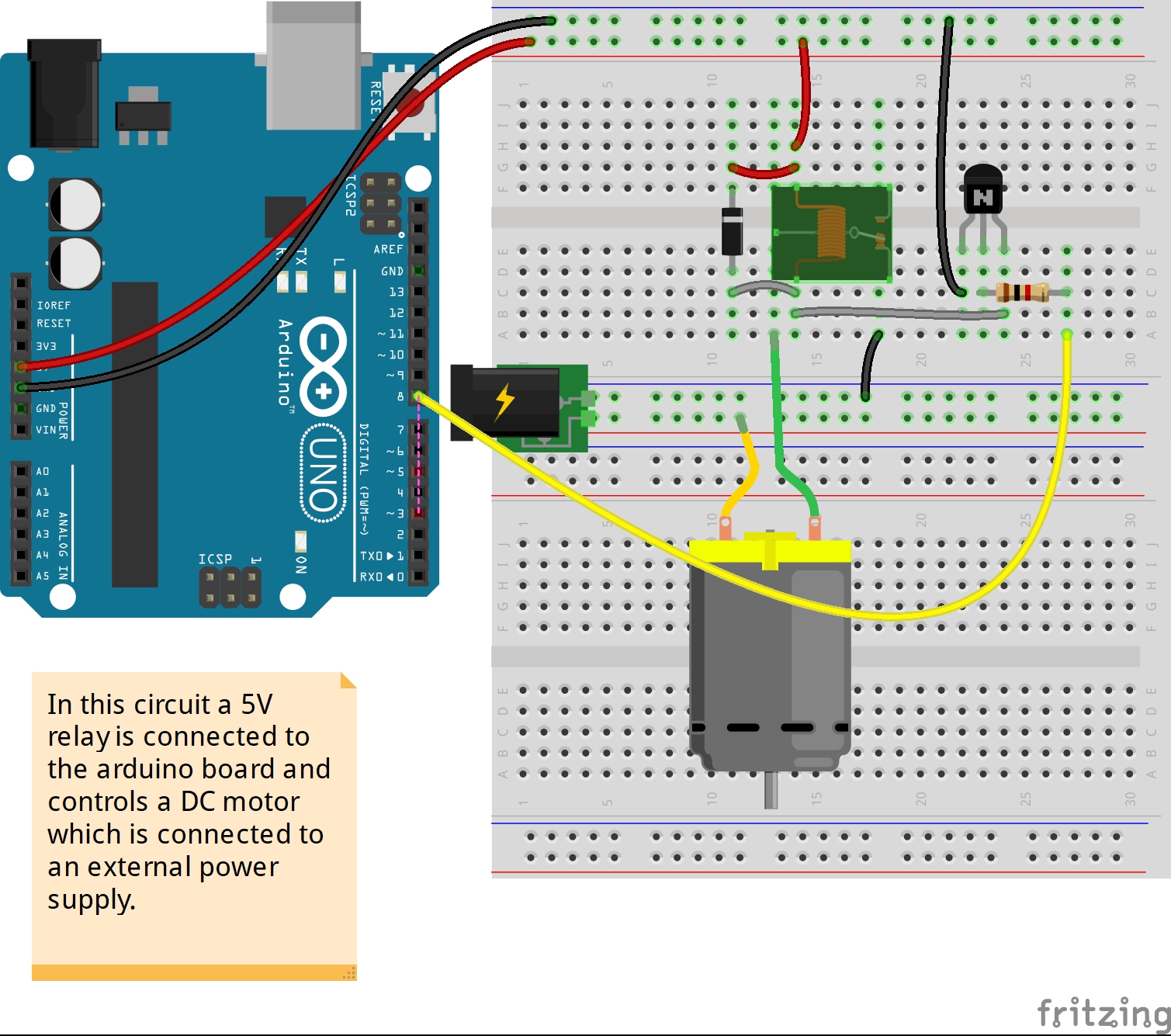
For Controlling Submersible Pump
For Controlling Submersible Pump
For Controlling Motions
For Controlling Motions
Comments
Only logged in users can leave comments