Ultrasonic sweep for objects with serial communication
Rotating object scanner using ultrasonic sensor and servo motor. Distance and servo's angle sent to serial port.
Devices & Components
1
Arduino Uno Rev3
1
SG90 Micro-servo motor
1
Ultrasonic Sensor - HC-SR04 (Generic)
7
Jumper wires (generic)
Software & Tools
Arduino IDE
Project description
Code
Project's source code
c_cpp
Downloadable files
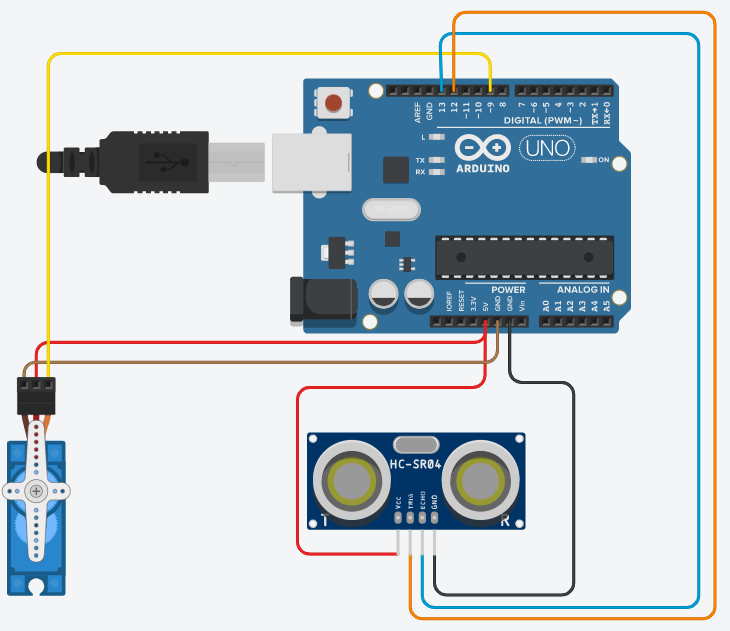
Connections Diagram
Ultrasonic sensor: GND to ground; Echo to pin 13; Trgr to pin 12; Vcc to +5V; Servo: Yellow wire to pin 9; Red wire to +5V; Brown wire to ground;
Connections Diagram
Connections Diagram
Ultrasonic sensor: GND to ground; Echo to pin 13; Trgr to pin 12; Vcc to +5V; Servo: Yellow wire to pin 9; Red wire to +5V; Brown wire to ground;
Connections Diagram
Comments
Only logged in users can leave comments