Bicycle Speedometer with Reed Switch and Interrupts
A rapid prototyping project which explores 3D printing, soldering, and efficient programming. While there are many Arduino speedometer projects, this project stands out with its compact design, implementation of external interrupts to accurately measure speed, and interactive visual for speed using custom LCD characters.
Devices & Components
1
9V Battery Clip
1
FTDI Friend with Micro USB Port + extras
1
Resistor, 200 ohm
1
SPDT SWITCH
1
9v Battery
1
Arduino Pro Mini 328 - 5V/16 MHz
1
5V 1.5A Linear Voltage Regulator - 7805 TO-220
1
TO-220 Clip-On Heatsink
1
Adafruit Perma-Proto Half-sized Breadboard PCB - Single
1
Standard LCD 16x2 + extras - white on blue
1
Magnetic contact switch (door sensor)
2
Capacitor 10 uF
Hardware & Tools
1
Soldering kit
1
Hot Glue Gun
Software & Tools
Arduino IDE
1
FTDI Drivers
1
SOLIDWORKS
Project description
Code
Speedometer Script
cpp
Downloadable files
Speedometer Case and Mounting CAD
SOLIDWORKS Pack and Go zip file
Speedomer Case and Mounting CAD.zip
Documentation
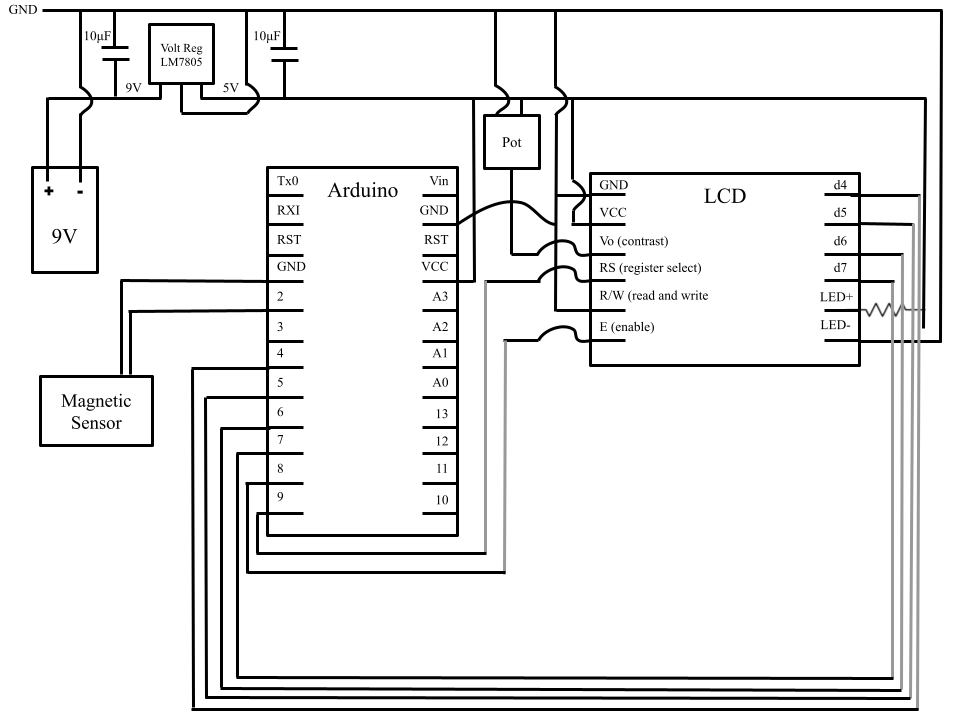
Schematic
Circuit diagram
Speedometer Schematic.png
Comments
Only logged in users can leave comments