Create Your Own 2WD Arduino Robot with Bluetooth Control
Control a 2WD robot via Bluetooth using an Arduino UNO. A simple and fun project to learn mobile robotics and wireless control.
Devices & Components
1
Arduino Uno Rev3
1
Bluetooth hc-05
1
25W L298N Dual HBridge
1
portapilas
2
B01 1:120 Motorreductor Plastico 1:120 un eje.
Hardware & Tools
1
Multimeter
Software & Tools
Arduino IDE
1
Arduino Control RC
Project description
Code
Bluetooth2WD
cpp
Control a 2WD robot via Bluetooth using an Arduino
Downloadable files
Chasis
chassis cut in 6 mm MDF
chasis.pdf
spacer
spacer between chassis and idler ball
Acople_bola_loca.STL
Documentation
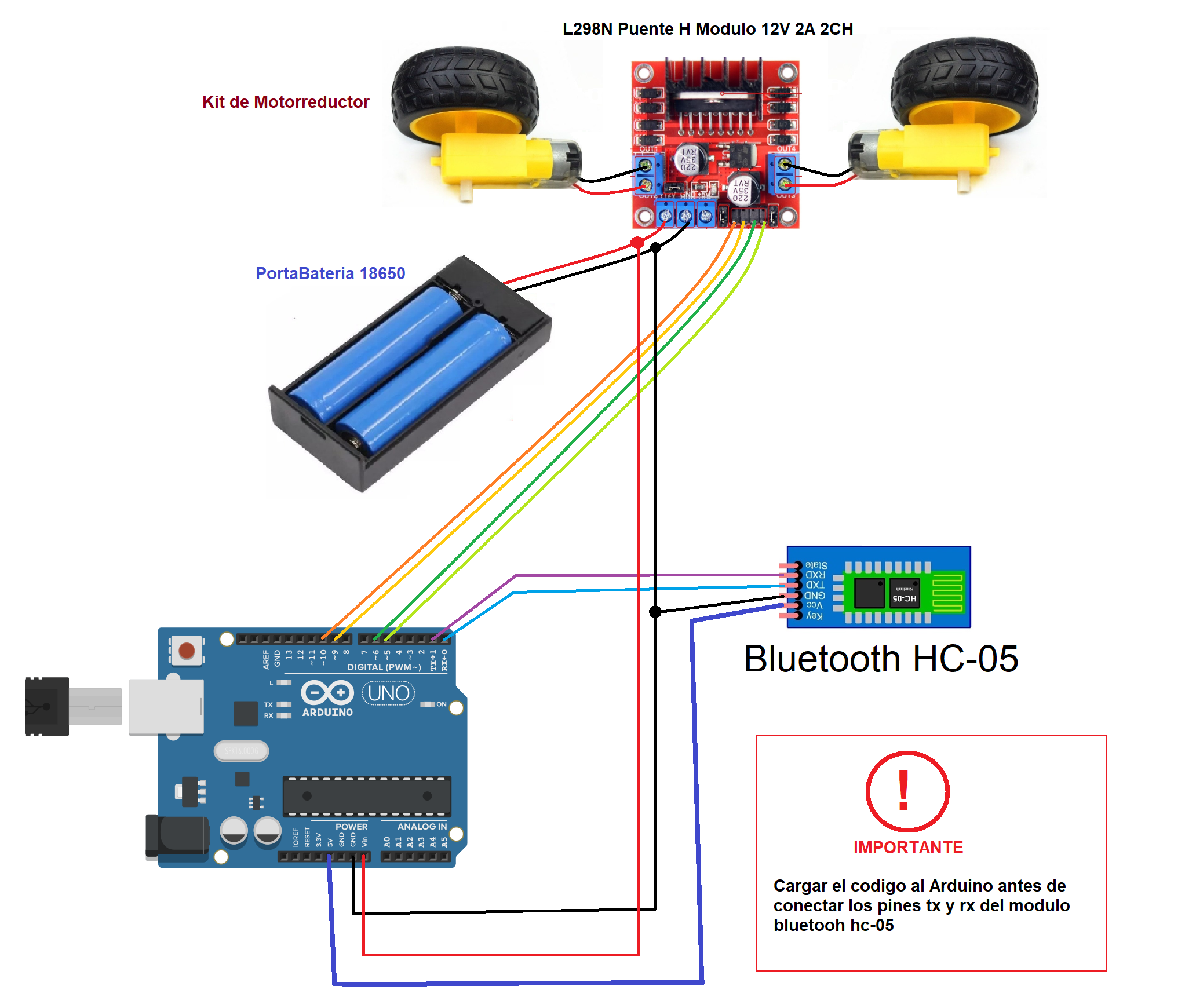
Circuit diagram
Circuit diagram
esquema.png
Comments
Only logged in users can leave comments