El Kroketor 3000
A smart food and water dispenser for cat, controlled at a distance using a phone application.
Devices & Components
Arduino Uno Rev3
Bipolar stepper motor with gearbox 42STH38-100
DFROBOT DRI0023
HC-05 Bluetooth Module
Hardware & Tools
CNC Laser Engraver
jigsaw
3D Printer-Ultimaker S3
Screwdrivers
Software & Tools
MIT App Inventor 2
Arduino IDE
Fritzing
Ultimaker CURA (Slicer for 3D printers)
FreeCAD
Project description
Code
Activate mill and tap
js
Allow to run motors, it's in C++ not in JavaScript
Downloadable files
Mill
support was necessary, made in PLA
file.None
Mill support
In PLA, no support
file.None
Slide
In PLA, support was necessary
file.None
Motors support
In PLA and no support necessary
file.None
Documentation
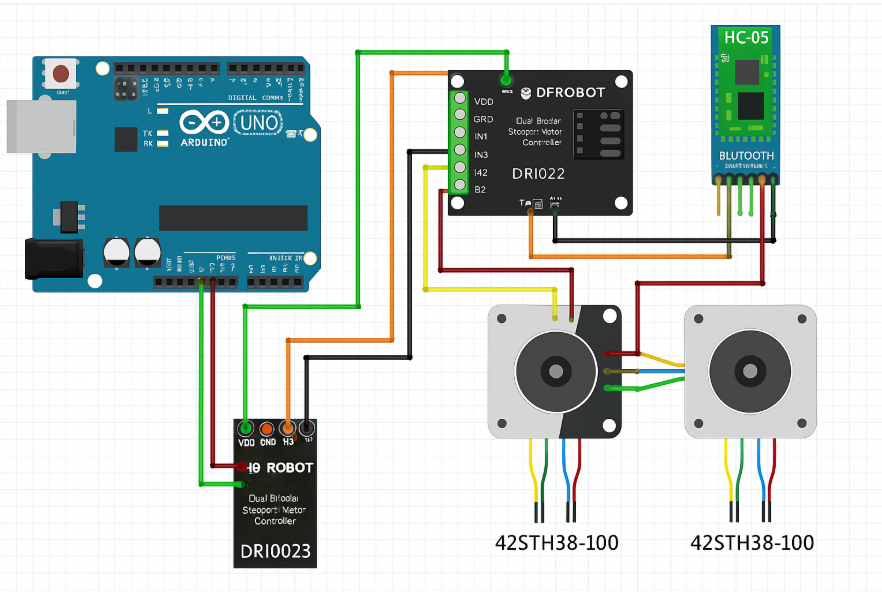
Wiring diagram
In the description
wiring diagram.png
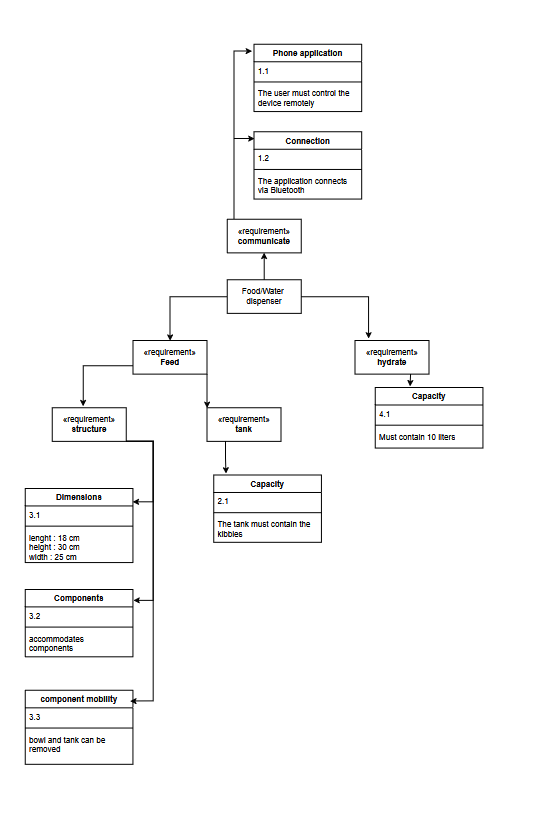
Requirement diagram
All our ideas when we started
requirement diagramn.png
Comments
Only logged in users can leave comments