Head up with gimbals
The gimbals are here to make it turn in the two directions of the robot.
Devices & Components
Arduino Motor Shield Rev3
Arduino Uno Rev3
Hardware & Tools
DC motor
BNO055
Software & Tools
Arduino 1.8.19
Project description
Code
Gyrometer
c
To implement the gyrometer loop.
Downloadable files
Design file
It explains the making of the head up with a DUE.
DossierConceptionNouvelleTêteCivile1.pdf
Documentation
Model of the frame for the robot
It gives the reference of the frame.
https://www.generationrobots.com/fr/404167-black-starter-kit-regular-makerbeamxl.html
Model of the motor 12V
It gives the reference of the motor in 12V.
https://www.conrad.fr/fr/p/modelcraft-rb350200-0a101r-moteur-a-entrainement-12-v-1-200-227579.html
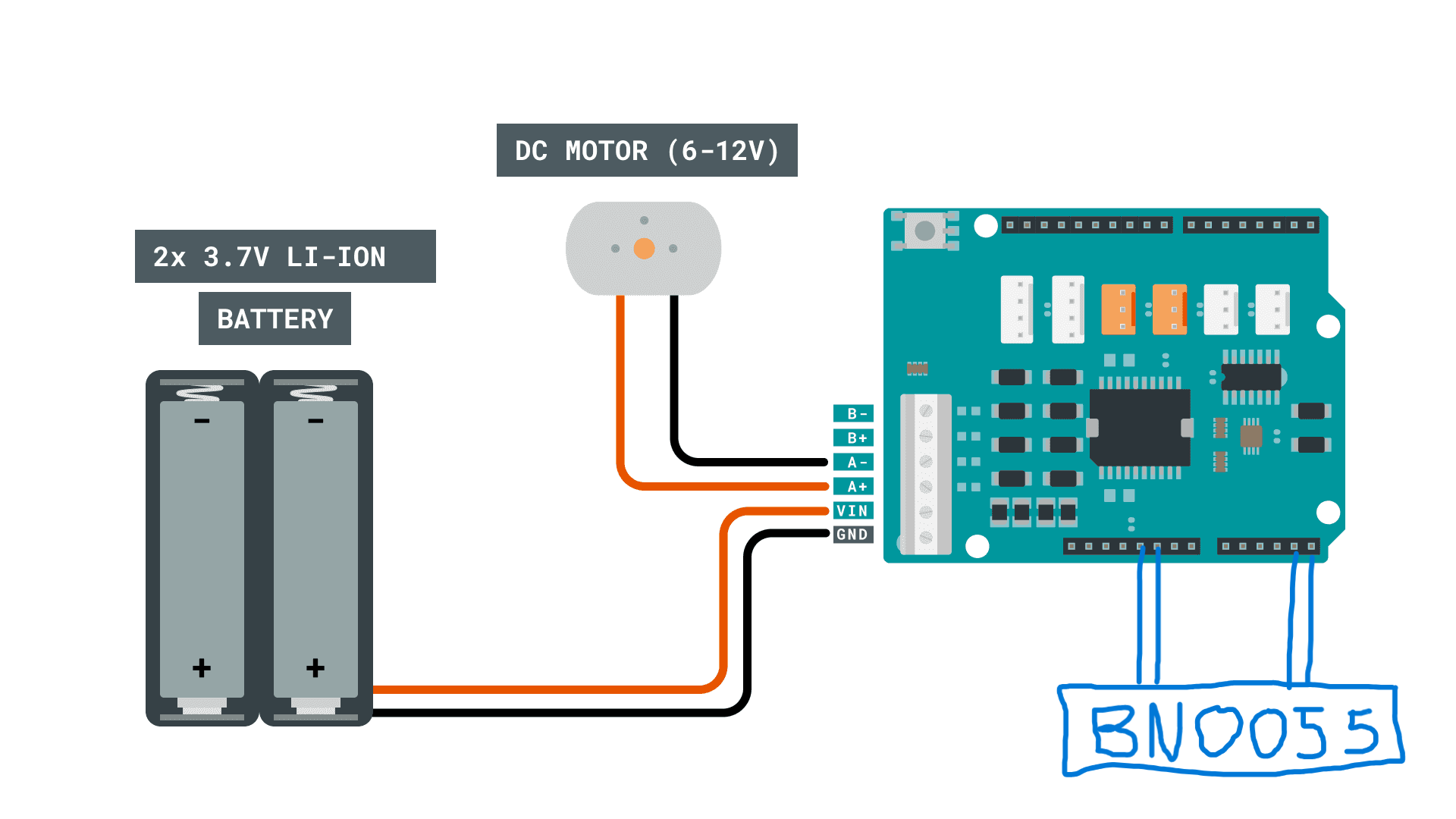
Schematic of the head up with gimbals
I have drawn the wires for the BNO055 board.
file.None
Arm of the robot
It shows the runner of the robot to be patented.
file.None

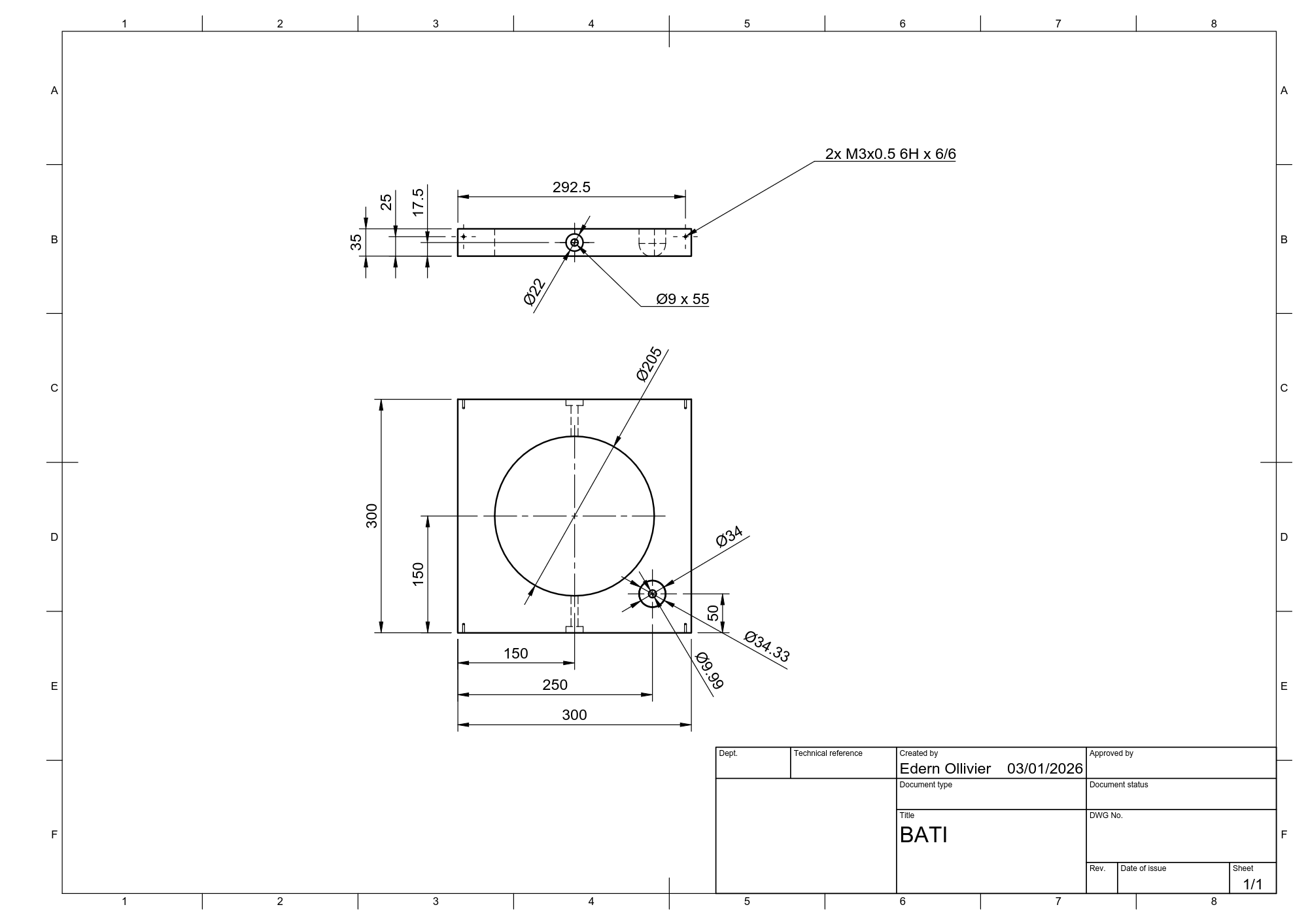
Mechanical drawings of the robot with support and arm
It gives the mechanical drawings to build it.
https://github.com/EdernOllivierYves/ROBOT
Part one of the mechanical drawings of the gimbals
It is the structure of the robot.
file.None
Part two of the mechanical drawings of the gimbals
It is the gimbal of the robot.
file.None
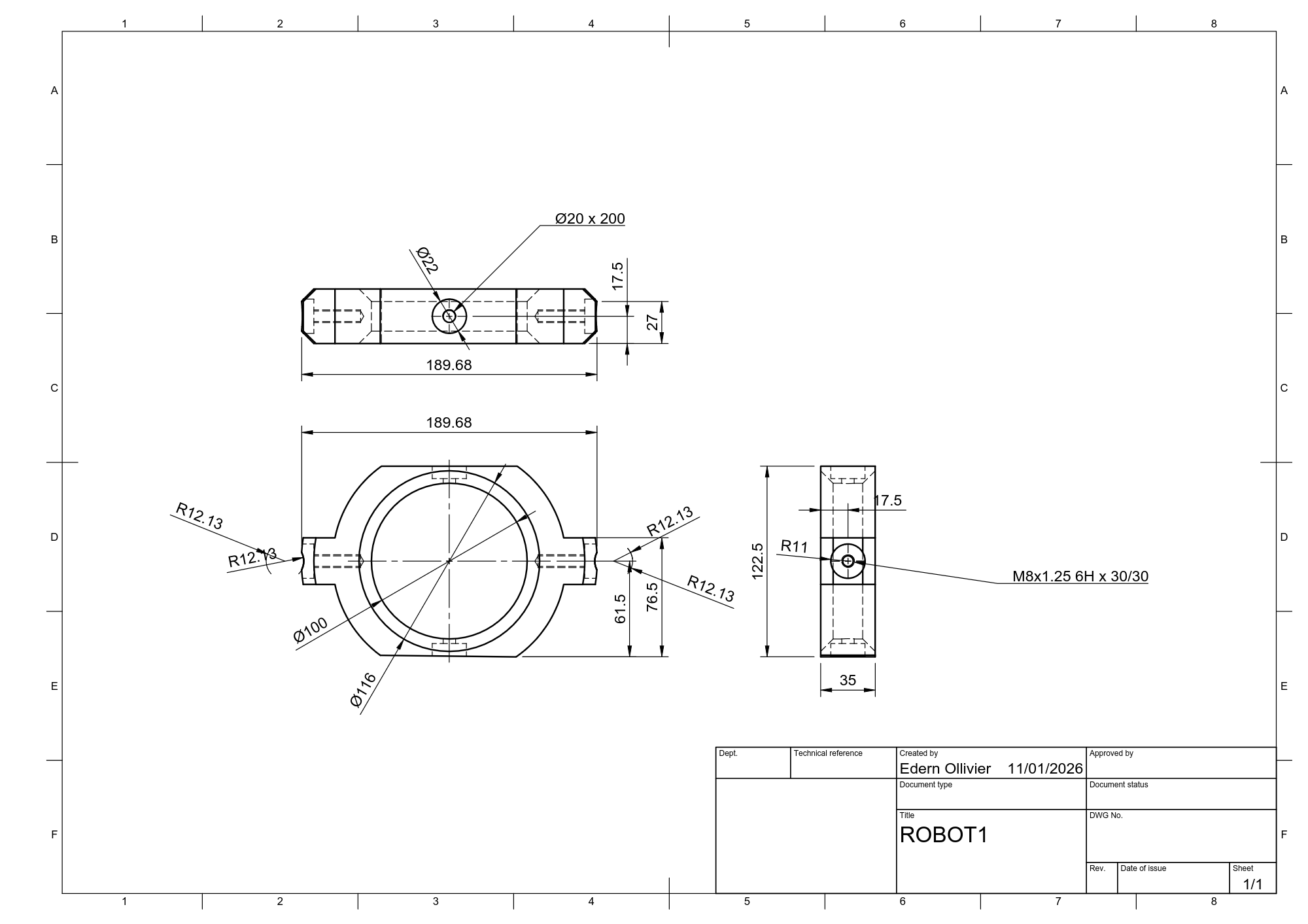
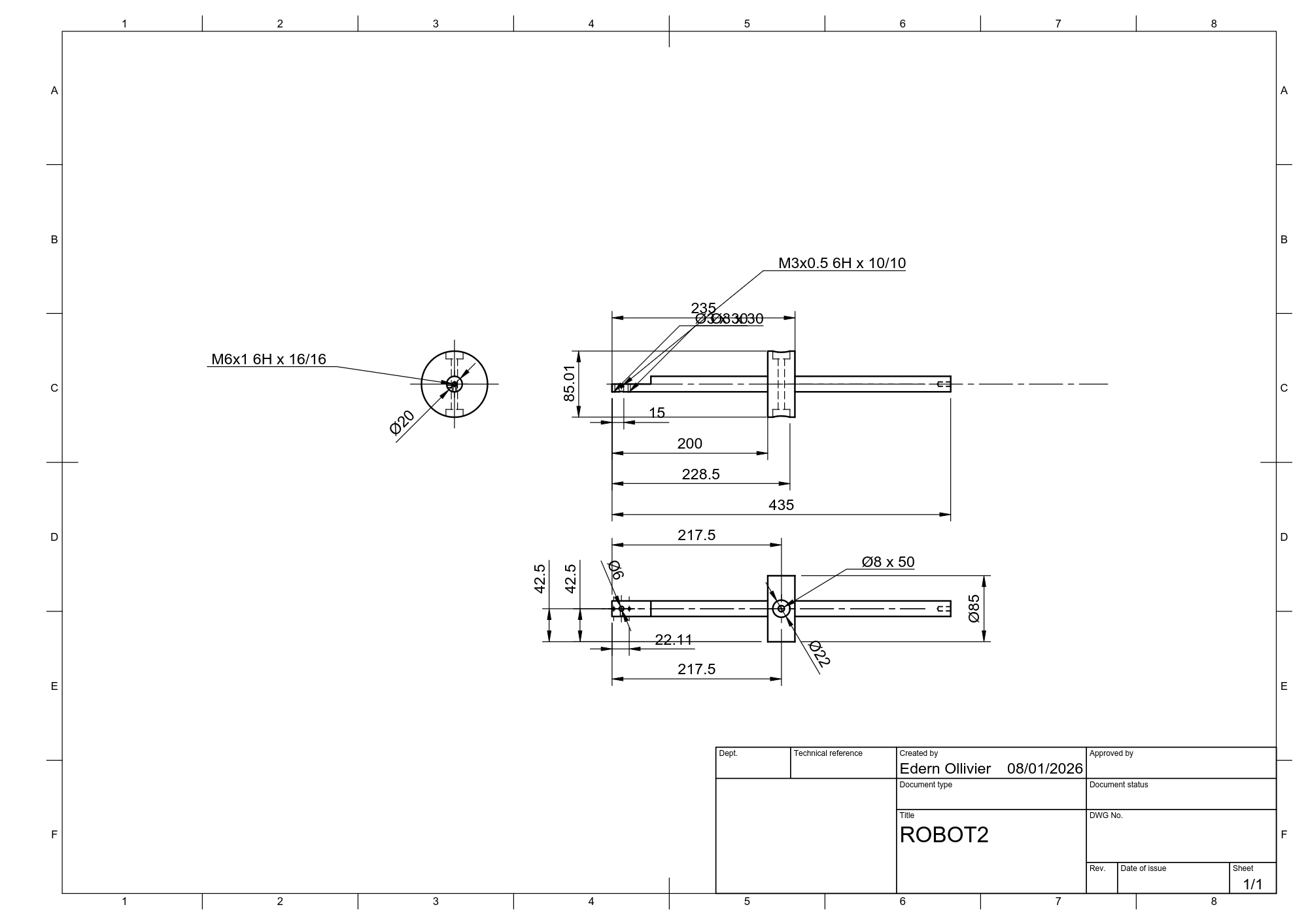
Part three of the mechanical drawings of the gimbals
It is the gimbal of the robot.
file.None
Comments
Only logged in users can leave comments