YMFC-32-C Drone - Enhanced Telemetry System
I created an MKR1010 based enhanced telemetry system for Joop Brookings YMFC-32 drone project.
Devices & Components
1
Arduino MKR WiFi 1010
Project description
Code
YMFC-32_auto_telemetry_receiver_ver-1c.ino
arduino
Receiver code
1/////////////////////////////////////////////////////////////////////////////////////// 2//Terms of use 3/////////////////////////////////////////////////////////////////////////////////////// 4//THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR 5//IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, 6//FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE 7//AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER 8//LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, 9//OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN 10//THE SOFTWARE. 11/////////////////////////////////////////////////////////////////////////////////////// 12 13#include <global.h> 14#include <base64.h> 15#include <WebSocketClient.h> 16#include <WebSocketServer.h> 17#define _WIFININA_LOGLEVEL_ 1 18#include <WiFiNINA_Generic.h> 19#include "network_parameters.h" 20 21// global var 22char ssid[] = SECRET_SSID; 23char pass[] = SECRET_PASS; 24const byte IPLastByte = 99; 25const short webPort = 80; 26const short socketPort = 8080; 27 28// WiFi 29WiFiServer webServer(webPort); 30WiFiServer socketServer(socketPort); 31WebSocketServer webSocketServer; 32WiFiClient socketClient; 33 34// Console Attached 35#ifndef TerminalAttached 36 // true = terminal attached (send serial messages), false = no terminal attached no messages 37 #define TerminalAttached false 38#endif 39 40// Buffer Constant Both sides must Match 41#ifndef Receive_Buffer_Size 55 42 // Receiver Buffer Size 43 #define Receive_Buffer_Size 55 44#endif 45 46// Buffer Constant Both sides must Match 47#ifndef Send_Buffer_Size 48 // Send Buffer Size 49 #define Send_Buffer_Size 6 50#endif 51 52// telemetry 53uint8_t telemetry_lost; 54uint8_t check_byte, temp_byte; 55 56//from YMC-32 57uint8_t rec_telemetry_last_byte = Receive_Buffer_Size; //this is the last byte of the receivers telemetry buffer they have to match the YMC-32's TX 58uint8_t receive_buffer[Receive_Buffer_Size + 1], receive_buffer_counter, receive_byte_previous, receive_byte, receive_state; // rec_telemetry_last_byte + 1 59 60//to YMC-32 61uint8_t send_telemetry_last_byte = Send_Buffer_Size; //this is the last byte of the transmitters telemetry buffer they have to match the YMC-32's RX 62uint8_t telemetry_send_byte, telemetry_loop_counter, ready_to_send; 63uint32_t telemetry_buffer_byte; 64 65// YMC-32 commands 66uint8_t ymc32_command; 67float ymc32_fval; 68 69uint8_t error, alarm_sound, flight_mode; 70uint8_t alarm_silence; 71uint8_t start_byte, flight_timer_start; 72uint8_t hours,minutes,seconds; 73uint8_t heading_lock; 74uint8_t number_used_sats; 75uint8_t fix_type; 76 77uint8_t debug_byte; 78 79int8_t page, previous_page; 80 81uint32_t current_receive, current_receive_min, current_receive_max, last_receive, next_sound, flight_timer, flight_timer_previous, flight_timer_from_start, flight_time_from_eeprom; 82uint32_t hours_flight_time, minutes_flight_time, seconds_flight_time; 83int32_t loop_timer, loop_timer_min, loop_timer_max, l_lat_gps, l_lon_gps; 84 85int16_t temperature,temperature_min,temperature_max, button_push, button_store,roll_angle,roll_angle_min,roll_angle_max, pitch_angle, pitch_angle_min, pitch_angle_max; 86int16_t altitude_meters, altitude_meters_min, altitude_meters_max; 87uint16_t key_press_timer; 88int16_t manual_takeoff, takeoff_throttle; 89uint16_t actual_compass_heading; 90 91float battery_voltage,battery_voltage_min,battery_voltage_max; 92 93float pid_p_gain_roll; //Gain setting for the pitch and roll P-controller 94float pid_i_gain_roll; //Gain setting for the pitch and roll I-controller 95float pid_d_gain_roll; //Gain setting for the pitch and roll D-controller 96float pid_p_gain_yaw; //Gain setting for the pitch P-controller (default = 4.0). 97float pid_i_gain_yaw; //Gain setting for the pitch I-controller (default = 0.02). 98float pid_d_gain_yaw; //Gain setting for the pitch D-controller (default = 0.0). 99float pid_p_gain_altitude; //Gain setting for the altitude P-controller (default = 1.4). 100float pid_i_gain_altitude; //Gain setting for the altitude I-controller (default = 0.2). 101float pid_d_gain_altitude; //Gain setting for the altitude D-controller (default = 0.75). 102 103byte led; 104 105// Background 106boolean Backgroundinit = true; 107 108// Return to Home 109uint8_t return_to_home_command; 110 111// YMC32 webpage, gzipped and base64 encoding to save space 112char webpage_base64[] = "H4sICJBMc2IEAHdlYnBhZ2UuaHRtbADtXXlzwkQU/98ZvwPijNZBTbhBbWdyAYFwJCFc6nRCLkJOchCC43d3EwL0pJTQ6qiZKS2b3be/99u359vd/vIV3seG0wGRWXiGfvflF79EvzM6byq3WcnMgpAMeH5ZSLyY/B1/91RPl+6m3Qb2Q7GQGUq6ZEieE2ZI05McmRekX6A4ysM0IAafERa840rebdb35B9q2YfvddXUMo6k32bdheV4gu9lVMEys5mFI8m32a8fRXa9MJF+fOaWGGb+OIQdw3lBUxzLN8UfBEu3nJ8yXxNlotxo/Pw47p+Pv9ovyZIt0/tB5g1VD3/KII7K699nXN50f3AlR5VPCxTV9Y+yrioLz/V4z3dfkm9bruqplvlThp+7lu570s/PI3mW/VMmX7Y3L7zTJdkDL2F78zYYxXZVU7bS4SjmC6mB2KpoO5aup0NykpFi6Vwkanok5eJVkIjpkdThqyCxQz5IB+Rk4ZRKpTOBqKmBlItXASKmBlKHrwLE5nUvHZCTRVMu1c4EoqYGUi5eBYiYGkgdvgoQAXQWjpWyBueLlfRV2Afd01XQFOErNCiBKqsf3gVWKmfVIDd0Pcm4Chr4anBAUcmq8s+AE40Q5r7nWWY6PIX6FfB4vCZZsnwNPMViNT0el19LoKJfBU8NTo9nLkn2NcCUClcA44jCx2OpFcpnYfEW18ACjCYdlh8P1gLM+MXJiuWIEpiiAByq+PNr7/cTmbkO5jY/nzPlQXX/Ja2St8FCfVFpmxdF1VR+ygDFop8XogSq6C2i5uZQSs8nTK66lUCUlycKgu+4EQbbUqPZ40vUSxvvBx7MnEAJCVIU6WySzfQcx9ycxXHTkSTzP0OyYBkGb8ZEX0jzMwL7Dlh4eImi0+Z+ZBAoD35OMFh7m0D4swj0LEXRpaSLvYjAf2pbUH6b5U8z0x3L0cDh39bi/pNYTgZCn0wxI4n/OYYva2ovJPg/ZcPR4PnfOTb7J7HsSqYIZgafye/XUr1SLwj/LYq9xWdS/PFD338Iwb9Ae9fT7tsDz9gvkQPqoZMKTDwzgs677m32od9n78g6etP4uS5lYrm32RfMV46fn/eFB9TclUxSint5j2U6SejzN2JUKq7Nm7fZcjYT6Q3+2umd3aNIsso/ySopjWK0tgTy/WV+14gVy7CxZr9A8zvg+RNfyBoEO+/EuYhkLV5//QT6HeY7DvjzfYm6qvnOBPzmfQk4U/XcKMl1WBHvCMexnAxmmWK8ahETDsKflqQq3mYJ5v4QL3sHX69sxDtQ4s6u3KVTCOJo93G0KwMYJkP64cKxPE8/iSKJe5/EvTaUpBJ0LfEkil20exDt2gAYyfMdMzO0Mi3LOIlhF/N+aN2DmNeG0ZL4qDnPUJagnQKRxLuP4l0Xwj63aEEue8dE/lPEVHbG8XaqhxijtPdxWoAwTfJ70MSkFsFvzhbhACMDut/gkgI65e8+jNyB6gmLS9mNE6egN06fkt9Yxj+YYEQHe2h88QJ2k5SXUZskvpzXRMBlpHYlIMf9OFKHkmFLDg8awQt4PSa+jNpj+svZPcq4jOB3Wy0IisanIPQYAka24PvLQ91kV9G/apTbHLAZEijlGHw0lLruOFe86/nGXHIylpxhwThJ18FkyT3Vf+7i3/fl+2P86/ajdw11kxmG9smxBIhzD+JcexSBCJ7P62CAa9jAoDLJYOEUkF2K+yTFfZLiyrAoftesnQKyi3P14R1lmcrbeYNI78/87NodZXHwq7nZXW1/FJTIeJZqv7tvn+YY8BLExJ/khTaooLsv2YzJG+BbfqcoxgyeZw9G99mMZQq6Kmi3WbDFNHFP3URJvwfpvgMjFhL/YZCJhlW/QLtURwBH1U+ooT5VQ71EjcJeDfJyNcg0aohP1RAvUaO4VwO/XA08jRrRpsQk68P39ypRSpSYpjKpKR9cqIP6RAf1Ah3Kex1S2dPlOohPdBAv0KGy1yGVMV2uQ7SLMsn58P29OlQTHZBUtgRGzxfqoD7RQb1Ah9peh1S2dLkO4hMdxAt0qO91SGVL5+twejh83Af6DxoRFy4dEcPJiDgiKYPt9Lr2aBhbgF0gb8zO7n5RTdv3kvKPFvCzexMCuqjbaLQAZ+++Meeu/fPJDgA+GMmjDS2PrMQUgdyHlvJd9oByF/2aBByLqfi0mMBCn2uDsZbkflR+d79EZPKOxCcEAc0NyXV5RXITio8BCXVPwhwrcCMTi+UCoaBtB+KA51oPAU178e9g7OwxaoIm2u38b6xzHNDrwyrdzrovq3UR4YdqVzqn2hXPq3aR4Cf1jgXB//5aB/ReS87Divc0LOFvH/y0+pUO1a/62dUv2t7/j/N0pq99Y7WhRrXPlIRoDehDXJ67euibqsDHeVDRmcif9rP+nUOte/8oTvaq2ZPmmgfqZ3AeHNaUHcvITLtYsfAEA0Ng97EXMnvXs0zpfABnm1KUy4OjGXtrfxx4KENRdW2dD3+a68Ch9A8yuosXHg9Gx8bqfoit/e9eP8NdgPIeyCVMCuC8lfYE2b62JiLOXqh/OfnF/oKjiIvcBSNL9z7UHbM/Oj5UjYs8Mkn6e5D+UqfMAxFp/DIPxFzmmumquv6BXFOWZV9Ic5T0coaj1OnIjSSk4VVwrPcQe0E3tTuyl3RTjwOfdVMm6DP/jb0UFqvrOx/gI3tvZ8VKngdcQB/WL3R5M/JRJfuKzjPHhwa9S3+fpH/PGO5dtvlobuU+mXK96bg5bog+pDwGnb8qtxf1SMjz5bhd+M13UafgehkUfDlzAe4R6OOR1SPuQ+h7oe8mY8e56qMjOwfk+/AoMMYff8vsakXsN75EkeNZ16Mih9DLFCk/1SSR9mTWLXiO/nhd9NvhEPv2qNkD68/0ZfkS7Y4nZ4/aHULfq12yLBWlfkHVw8mJt9VkB3ikJgtSZKIVzqQZcS/RcHf89ahdHPJezZ4pk2yff1sVBo9LDPy6CLy3eAQ+DrkOeG9xBvhhC4B/sq3xTD1eaA5dwVFt70k6YP2Z3dpJ5jaTDdyfICibyYHOzRSt4Efd2k2vf1xYrhehAq+yP9XgGgxlf35BEJh4gl+3GdPX9Rfe75CPeB1EgV99T4qvvea9e17nHSPKQQoyGcQXVesmK4Jp+k989DcU8Ouf57wrVUrfQ5BPMwh4xl2WCjhyiiDuVJsoFh0gBD+lxrI2VhASDsYuRHogXhNXph6iIGEvR495BFEXQXdslJo1mmZwtStgqNAqYkIOw9dQdYOUhutFndlCYY1GcBREVWhk1oRIqocgDF1qUkMBl0iSXGyafRTx8eqiL6NoEaqXFKFdDHJWGSpLJEKCnEdBlHhEF/oMT9IB0UXaKq7Uy82SSVNVgx6NyUozYATZnSGC29Ha642yIZbbBqfILYul6/Sq2ukFq1bgo/liFynx+RWEG6jTUgaCsVSb1gKCiAArm80BYbAlIEkbdfqLtpwb9xVr0xb0xraoKSYEiSiSC/l8c+E7PbO2nUNQvdfzvZ6/2BbzMgSe+toDn9scKSIEwN4pUTSJdKx5i/QIcoo1EWKDBlJtKQytRn1LdhxCxKekPyh0lf64wRLFUjBVmbK6ogdLuE1K1kjUm6URXpoglaqBCD0+Ly+2SH4ZtPwhs8E5GoLUKSpsly112BaApLCjt2htDVEtmptqPquWqyE9BOWtKPKsxy/p4sjY5mYAZs4wimOjSJerlXWEPVcsgM8yRPQVAB0fKQsaiZ7IVmYIh6D5MQkPZr4ShwJLAZ+EVjQZsbCKgzBQLsjuQbEVQdAMhSmBjTa7elsjt7VlZ9FcL0taZbllzBXv9jpAwUVZIatom8fySB6xeuiyrcxDxB6xJRLXZwrOlcccsiE6eM8wEKq1ndlwQ9vmG92h0Wzo4DcRWiLJrwUM4Vr42OkgJChivmBhCkkRqG/PlNYaWRCoMKssLRrdsNUKogiC09CFLbruUBhMkwUBtbDGWh7iiFWVrD5Nmit8gHprBydmaG/aK2+CXrChGTmozehyQI+odb/Wn3I5o7VuUDq+gMtdUamiw8rUYQY2hm7NLlpwIGjTaS/DsL/ICaThFKCSaLlCgFdMabb0Z0wJUQBX05ixML8RRNrbTNHpdCaqssbhynY74SdmvTaDLbVOUlzZQJcNpGcwgT5qF6HKcoojxoZX8Sb4slnSNIZ1NGYOVTQFCsY5jW2XIcihrLlGsWrHWA0gWNXaPs6zPCtDlbZKTSliao6hHKj7+TEzalNQnTDo/HRGumuoQm+DsLzSqlDOIzjY1HS3CG1Jrjvo9CZQJZxRck5rKIisNEOqgXDB9GArgljm1N5gNIl0s2ObIODRjO4EdZKNbGVnKSOaDBWS0EdOQ0PZXHuh5gjE93N6B9GmHEG6BoEQVlfCDYwYdtcy2xo2tUaZGbeq2hYi2NZ4gKwgTcCYxQr1uqKlDcRuda3qVaZZryEFV6hu+5XZeghCbaPPIbOh2R7nepPNyhBLeXHVrhjUcLJxBrY5qvFrnpTL7Jqq2qY4WA/AZ5upd3y/JkuDta/64NY5Zby0q10ZGjDLjdDABrg2LuZdR7UwYqOu13VdCDoE33JlqGoFBWChQ6jOAHaJxZTQEQujGl4XcTaBusbb7dycybeGnbaoE9aQoDBypRDBqMnSuQVpwL15pzaeCEOChLmBxRd682YpLHRguE2M5zN+3Z5oU35l1TGmxZbLDWE2XHZAhex1LGzKmSwNO+ONM5s3OvMOueh3BjMpL7Q72xnL0w4ZclQLnxmjcqe0CVkXZzrjvuPzZtNbUu1JgzACnpzj1ARekAOUowejxkijNdziejJr4Qrd7AwkzdpIzS1Swrm1aZbmm60wc7x2qNodedALy0GurpuTQFm5atjqSezIloygNB/P67Y7lVaxraAWgtJeKeyONtO4uddoC3y21lObKhsVJKog2ASPbAUv15dzfag6tFT37YZrzOZ21xfDKrXNT/L41N30++zYlger3qQwXmleB8a7a78Z6PPeslQa6hI1oHNNV57nmv1xv9O2SGc8LwpkV5L6vYq+LfjGcNWdjGrdZREOxwN7abF83V92amwotQflsGz0x3m8slhTki2tJWCauAUbCsZgep9QkN66iNb5iqxqCsf6oI9BusjQaW6qpqmU7bKqGoPezJVpaooWXJwitS3TmfVbTYTnQlywGyhLNetdjEYo0PUqtFuY+mbf3VIsEtLTwQgrTMVmU2rhBXEotrW8jYCkY3xpagLVaYQGW2To2ZA0tyFrgS63CdO+hBWVrosR0w230h1h06loeYqmBdcIpxI9EIFI2W8OEBZDNWHUpemVPWq7C1/Ne9qEbtMjuD9pIrPuhO0TBMqozmQ+Yuhx1VdWVbJbdQZjdhbierdI+j1C22yxfhs2w8Jw0dNChlfz84oEupaiuO01tz3QXZZ8ZN0all2OEWZYQ/A71KLfcGsGhYDu0itxYwTYALrrQUqrecuCPXI50jhu164ECCqzoDOerXY9k6nEfVC+teza+z5ohiuxrXDakMhzyozgiM1qGpq9/Gq2XpF9hiAaBiq0aS0QN2rDC+AV0deaUxkMY2TUV+tdWinRSAtZjT1k3LKwjZ+fyqWRPKYGZLdgtPCGO6eJUTMIV7RFC4EptyRS63n1qampPJu31G0orNrOptTp00t+MduM58JM2XrLglCqmx1DI8VSia3ml7BQk0b1EO9U/AGz3ZQn+ZqEr5druhJ2rPqMZSs6BNXAouGgA1FgeEGSptNvQI01biH4FGmi3ea82vAIxyh3J13dGCCgxJSxx1dnm4Ji5WqbNsyp2LxGtVqi7I1Dqk2Azg4hXTLHzSd+pSrOuktDwZtYU8+3cmu7UeqxuKCxpKZVR2LO3RALlO4yXG0J5QscySy2LM+JdM6hubLWlBobI7eY561FxR6PjXXRXxuMhOswZ6493h7x5NbKL2dzGbLxCqFTK3aSczijT/fsdoOHnJzLlyTIRnVQ2lZcekWMU9gFJTbJjTutRv3IgHEUDEFF3KfLTayKrwY0psznbQ6xGJZb5nokoSrwVA7H3MLKj1AURXbtSglBZ5vyVu6CGWgk2giiz0a5URzAQb3pRbYix5kG1KIL6up03FVGRDPPwQ2yiaHKBJ0gntxt5WHwEPGDcehUN+HicDgUeyg+s2zLnq6d6BtfLJQN0ugp4OVgVF8VbWMKb6x+Zb4uOjAc5ki8qYpQnef52bDZ9Zd1w/brXVu18uLEccotghnOWGPFFSuABd/Y9kC3Yc3X0GRTWtfVpcYybI+iF8jYN3i7VhgzLMqtJqw3gqYCm5uMKJNlc2MKd6wVAjrTLuEibE4aGw63dfqwRRhECWb07qyc6+OkhoQdpMkFs6Ix6hgCbwhtszsuVLrMQOGCyjJHaYuw1Rw1p0uW4zo9229ztNUnkRBfE2GzxpZDuVMRFzMBHm7yHRJS1mqHqqzW64abz82BCW7LNZ/rmU64qmhemdn2MW0w1ker0aTAQ6At4UQu33EmlFyCm5aqNiYdMPZcgQO4+MTpKyucKdbaKDwPqqxF5WZo3cozmEYv6QKGTmcdEcqN2psZw8z0Fat11MCFx40NF2KB21G7YXXBjRoLksecHg1mBEPSpdR10OmoirusTaZ64EHjjlrolcR4HoSBAcmSY3pky+7O0OZU5ekBOw2jRohCkgcbx79srgF1lRzMWwuWBOWDIm5X70NQRyu5luWG+TbbYKZjnsJKqxk6HTeY5kwMVgCh1kNHhgXG+G0NQJ2UGg3QkDI5ymVLY8hpgEHb/88/+xkRjRZy5sMV6vm5wajzoubPmhyS9ukukaDXXMBiC6lQYb0oFgVfeC0PjLvNfvfzbnnj+Mi+uduVIOw2KLDxesTNdy/dASBagm+AtegfFckjdCn6Ew1J8eb51oLvflSBNKc17FJg4eHbX6LD9rsj/WA9SBKBTzjObbfSHr28+/aI7PgkqyPJ2sVYmifodqsv351I8iNYIrYlE6TcK3hU6WPUig5HmQfFJPGg1/NM/zyJO9mQ8xC68Qj7syUkADjadgFSGD+K4I8fgbdI9W6yP4HyfjmZKmdu9sl+hX/P3IKFLCJ7yOVdLD3eRvSIo9weUbQG9puZ/fka4l0hOnQwBC7J23enakmRZ+8VGH9mMpLuSi+Sw/xPzuvkDC4kB6ytfxgzQPZ7aQFJrscJfpoTN4jOEB9T5X/fRT/xCDzIKotmfzpGezcrxz0dT9qyA5DC7z9fRX7ksX8tj+LV8uA3r+VROiePqPXUrSDaqrJrce3onww0dIv3bh4w8t0ZolT55oGkX27BdYA/lt8s0+Q5LtP/GPn5b87J8M+3o7yEqfiRmC5MdoYqc7DzVPv5nApCpKogD+89SVVFzgfMpgL84JqUVHghKONGoqJPDzRpbgbOuJE3E7SK0TfJjDYPiG8LAuNI1wPt4omW9tvE5frtOcYBjPioSdy2wmebsKT/GDsQe8ANFw3YDg7db8/I+M+4cU+blSyfldfbUc43qE4qg3py4006qzofdCMV6OMFOZ+Fd5YK76PLdD4LcisV5IdX73wSYC4V4JfuOvgk4KNUwJPbET7LLMapwL58g8InQZ+kgr67c+HTWoxpOrDgkobPRDtMhfbhnuaU7duZeXzcfONxPqnnHOcXAZWqCKKdzx/IfiT+g4mPsvhszplUnO8vXks5ajpD/sexfsjjM2kfpKI9vo/tI3mPM/ho4uNMPp15JBXziH6FLvRN6R/HeZLDZxKOpyL8eInbB3F+zOADaT9m8pnMw6mYf3zwIhX550AWJZn3dS8N4sNh29fA5q8BFixdnBl82u0lRUjP8tclSQTdcqWb797tX4vTnZXRdRyDVvy/abJ3uOoKZzgHY6ySF417LN+7eeSW/T4TbTt5ReVTDDzx7j7znO43r4Nb1Yk1UJNSwQkUoNANOFoDLi+UfBOsiYvZ7x+R9k6O/wSZvqso/zzhrX7hAp4XEaly/B4sGx530r9a3hAUuXK8heomkTPgLx5kCJZBv8/EJwpULwNq/5dfXLjyqYqRTuesHz68eOgVM3l+NuD58/R8wPsWOQEhgZQBtz4k/qroimYALBHqvppIVh3X2xEG4CfRAbG8FzEq7M6D6yE4zfGaiCSxeSyN1+PG69RRyfAuiC5FewWeZnlI/Nw8DgR99XBl+cLyTYTFpXzuSvE5Jf3np1qc+e3bxqSKZxhlVPXebqx2pRjpYukSOD+j3BxkPGsSXm8Qnt+19EqDcJR+usjBjD96dcp3CDIEYt7wKYPOYc0f/1HLiR4t0uHmcGQoCz73hO8DkhxPmdcDHlPJ+hOMmqJ7um8iHt+EnvTfIPL5Frxre97d+b62awA43XtWcvhOj3vZr7LJBoK3bfB1w9rfJvSmZSX28pqtRDLeMJYoygNreZelRGmT0rygJM8pxXcx9vxoXhSy73xf2cW0r72Ao/zPL1bdRAjozpMjl6cYFy1gDPGJzNt3+09/frW/OEh9u8N4rBL8jprxovKPxAGKLm25XrOhuIj+3hbhXBN7cGz6dYOKyvSUF/rhjUDffvdjfHfBj8lVCy+aX+YmlhlbX3xj0LfvnjqczDTqhaMrHr79+SKhu0sjngk9gH338O9iJeL8rq5FTM0FDRMYIcYi3OhajFcMKr5BIC7Nd+5nefQfng7HhXdfk3/rBP7Xk2fod38BCA/etDOFAAA="; 113 114void printWifiStatus() 115{ 116 if(TerminalAttached) { 117 Serial.print("SSID: "); Serial.println(WiFi.SSID()); 118 Serial.print("Signal strength (RSSI): "); Serial.print(WiFi.RSSI()); Serial.println(" dBm"); 119 Serial.print("IP address: "); Serial.println(WiFi.localIP()); 120 Serial.print("Gateway: "); Serial.println(WiFi.gatewayIP()); 121 Serial.print("Netmask: "); Serial.println(WiFi.subnetMask()); 122 Serial.print("Webpage is at http://"); Serial.print(WiFi.localIP()); Serial.println("/"); 123 Serial.print("Websocket is at http://"); Serial.print(WiFi.localIP()); Serial.println(":" + (String)socketPort + "/"); 124 } 125} 126 127void WiFiConnect() 128{ 129 while (WiFi.status() != WL_CONNECTED) 130 { 131 if(TerminalAttached) { 132 Serial.println("Connecting to " + (String)ssid + " ..."); 133 } 134 WiFi.begin(ssid, pass); 135 delay(5000); 136 } 137 138 IPAddress IP = WiFi.localIP(); 139 IP[3] = IPLastByte; 140 141 WiFi.config(IP, WiFi.gatewayIP(), WiFi.gatewayIP(), WiFi.subnetMask()); 142 if(TerminalAttached) { 143 Serial.println("Connected to " + (String)ssid); 144 } 145 146 webServer.begin(); 147 socketServer.begin(); 148 if(TerminalAttached) { 149 printWifiStatus(); 150 } 151 //WiFi.lowPowerMode(); 152} 153 154void setup() { 155 pinMode(LED_BUILTIN, OUTPUT); 156 pinMode(0, OUTPUT); // Green LED 157 158 if(TerminalAttached) { 159 Serial.begin(57600); 160 delay(5000); 161 } 162 Serial1.begin(9600); 163 delay(250); 164 165 led = 0; 166 ready_to_send = 0; 167 receive_state = 1; 168 check_byte = 0; 169 170 // check and make sure we are using the lastest Firmware 171 String fv = WiFi.firmwareVersion(); 172 173 // Serial port initialization 174 if(TerminalAttached) { 175 Serial.println("\ 176YMFC-32 - MRK1010 Receiver/Web Server Started"); 177 Serial.println("Version " + String(WIFININA_GENERIC_VERSION)); 178 179 // check and make sure we are using the lastest Firmware 180 if (fv < WIFI_FIRMWARE_LATEST_VERSION) 181 { 182 Serial.print("Your current firmware NINA FW v"); 183 Serial.println(fv); 184 Serial.print("Please upgrade the firmware to NINA FW v"); 185 Serial.println(WIFI_FIRMWARE_LATEST_VERSION); 186 } 187 } 188} 189 190void loop() { 191 if(WiFi.status() != WL_CONNECTED) 192 { 193 if(TerminalAttached) { 194 Serial.println("Lost WiFi connection"); 195 } 196 WiFi.end(); 197 WiFiConnect(); 198 } 199 200 WiFiClient webClient = webServer.available(); 201 202 if(webClient.connected()) 203 { 204 if(TerminalAttached) { 205 Serial.print("New client: "); Serial.print(webClient.remoteIP()); Serial.print(":"); Serial.println(webClient.remotePort()); 206 } 207 String header = ""; 208 209 while(webClient.available()) 210 { 211 char ch = webClient.read(); 212 213 if (ch != '\r') 214 { 215 header += ch; 216 } 217 218 if (header.substring(header.length() - 2) == "\ 219\ 220") 221 { 222 if(TerminalAttached) { 223 Serial.print(header.substring(0, header.length() - 1)); 224 } 225 226 if (header.indexOf("GET / HTTP") > -1) 227 { 228 const int webpage_base64_length = sizeof(webpage_base64); 229 const int webpage_gz_length = base64_dec_len(webpage_base64, webpage_base64_length); 230 char webpage_gz[webpage_gz_length]; 231 base64_decode(webpage_gz, webpage_base64, webpage_base64_length); 232 int packetsize = 1024; 233 int done = 0; 234 235 webClient.println("HTTP/1.1 200 OK\ 236Content-Type: text/html\ 237Content-Encoding: gzip\ 238"); 239 240 while (webpage_gz_length > done) 241 { 242 if (webpage_gz_length - done < packetsize) { 243 244 packetsize = webpage_gz_length - done; 245 } 246 247 webClient.write(webpage_gz + done, packetsize * sizeof(char)); 248 done = done + packetsize; 249 } 250 if(TerminalAttached) { 251 Serial.println("--Interface webpage sent"); 252 } 253 } 254 else 255 { 256 webClient.println("HTTP/1.1 404 Not Found\ 257Content-Type: text/plain; charset=utf-8\ 258\ 259404 Not Found\ 260"); 261 if(TerminalAttached) { 262 Serial.println("--Page not found"); 263 } 264 } 265 266 webClient.stop(); 267 if(TerminalAttached) { 268 Serial.println("--Client disconnected"); 269 } 270 } 271 } 272 } 273 274 if(!socketClient.connected()) 275 { 276 socketClient = socketServer.available(); 277 278 if (socketClient.connected() && webSocketServer.handshake(socketClient)) 279 { 280 if(TerminalAttached) { 281 Serial.print("\ 282--Websocket connected to: "); 283 Serial.print(socketClient.remoteIP()); 284 Serial.print(":"); 285 Serial.println(socketClient.remotePort()); 286 } 287 } 288 else 289 { 290 socketClient.stop(); 291 delay(100); 292 } 293 } 294 295 if(socketClient.connected()) 296 { 297 // Background Init - setup the background tasks, runs only once 298 if(Backgroundinit == true) { 299 Backgroundinit = false; 300 301 String data = webSocketServer.getData(); 302 if(TerminalAttached) { 303 Serial.println("Websocket Flushed"); 304 } 305 306 // flush the serial1 port - Arduion to Arduino comms 307 while(Serial1.available()) { 308 char ch = Serial1.read(); 309 } 310 if(TerminalAttached) { 311 Serial.println("Serial Port 1 Flushed"); 312 Serial.println("Background Init Complete"); 313 } 314 } 315 316 // Background Process 1 317 // see if we have a command/request from the user 318 String data = webSocketServer.getData(); 319 if (data.length() > 0) 320 { 321 //String cmd = data.substring(0, data.indexOf(":")); 322 //String setting = data.substring(data.indexOf(":") + 1); 323 // get tools to parse incoming request 324 char buf[data.length()+1]; 325 data.toCharArray(buf, sizeof(buf)); 326 char *token; 327 char *pter = buf; 328 byte i = 0; 329 String cmd; 330 String subcommand; 331 String usrVal; 332 while ((token = strtok_r(pter, ":", &pter))) 333 { 334 switch(i) { 335 case 0: 336 cmd = token; 337 break; 338 case 1: 339 subcommand = token; 340 break; 341 case 2: 342 usrVal = token; 343 break; 344 } 345 i++; 346 } 347 if(TerminalAttached) { 348 Serial.println("CMD: " + String(cmd)); 349 Serial.println("Subcommand: " + String(subcommand)); 350 Serial.println("UsrVal: " + String(usrVal)); 351 } 352 353 // process command 354 switch (cmd.toInt()) { 355 //do something (1-9 are the PID buttons - they don't get sent, they are added to 20 and 21) 356 // minus 357 case 20: 358 subcommand = "Minus"; 359 break; 360 // plus 361 case 21: 362 subcommand = "Plus"; 363 break; 364 // user command 365 case 30: 366 if(subcommand == "Ledon") { 367 digitalWrite(0, HIGH); 368 webSocketServer.sendData("R:" + cmd + " - " + subcommand); 369 } else if (subcommand == "Ledoff") { 370 digitalWrite(0, LOW); 371 webSocketServer.sendData("R:" + cmd + " - " + subcommand); 372 }else if (subcommand == "Pidr") { 373 webSocketServer.sendData("R:" + String(pid_p_gain_roll) + ":" + String(pid_i_gain_roll) + ":" + String(pid_d_gain_roll)); 374 }else if (subcommand == "Pidy") { 375 webSocketServer.sendData("R:" + String(pid_p_gain_yaw) + ":" + String(pid_i_gain_yaw) + ":" + String(pid_d_gain_yaw)); 376 } else if (subcommand == "Pida") { 377 webSocketServer.sendData("R:" + String(pid_p_gain_altitude) + ":" + String(pid_i_gain_altitude) + ":" + String(pid_d_gain_altitude)); 378 } else if (subcommand == "Rst") { 379 reset_data(); 380 webSocketServer.sendData("R:Reset Sent"); 381 } else { 382 webSocketServer.sendData("E:" + cmd + " - " + subcommand); 383 } 384 break; 385 // user command 386 case 40: 387 if (subcommand == "CRP") { 388 ymc32_command = 1; 389 init_telemetry_data(usrVal); 390 webSocketServer.sendData("P:" + String(pid_p_gain_roll) + ">>" + String(usrVal)); 391 } else if (subcommand == "CRI") { 392 ymc32_command = 2; 393 init_telemetry_data(usrVal); 394 webSocketServer.sendData("P:" + String(pid_i_gain_roll) + ">>" + String(usrVal)); 395 } else if (subcommand == "CRD") { 396 ymc32_command = 3; 397 init_telemetry_data(usrVal); 398 webSocketServer.sendData("P:" + String(pid_d_gain_roll) + ">>" + String(usrVal)); 399 } else if (subcommand == "CYP") { 400 ymc32_command = 4; 401 init_telemetry_data(usrVal); 402 webSocketServer.sendData("P:" + String(pid_p_gain_yaw) + ">>" + String(usrVal)); 403 } else if (subcommand == "CYI") { 404 ymc32_command = 5; 405 init_telemetry_data(usrVal); 406 webSocketServer.sendData("P:" + String(pid_i_gain_yaw) + ">>" + String(usrVal)); 407 } else if (subcommand == "CYD") { 408 ymc32_command = 6; 409 init_telemetry_data(usrVal); 410 webSocketServer.sendData("P:" + String(pid_d_gain_yaw) + ">>" + String(usrVal)); 411 } else if (subcommand == "CAP") { 412 ymc32_command = 7; 413 init_telemetry_data(usrVal); 414 webSocketServer.sendData("P:" + String(pid_p_gain_altitude) + ">>" + String(usrVal)); 415 } else if (subcommand == "CAI") { 416 ymc32_command = 8; 417 init_telemetry_data(usrVal); 418 webSocketServer.sendData("P:" + String(pid_i_gain_altitude) + ">>" + String(usrVal)); 419 } else if (subcommand == "CAD") { 420 ymc32_command = 9; 421 init_telemetry_data(usrVal); 422 webSocketServer.sendData("P:" + String(pid_d_gain_altitude) + ">>" + String(usrVal)); 423 } else { 424 webSocketServer.sendData("E:" + cmd + " - " + subcommand); 425 } 426 break; 427 case 50: 428 if (subcommand == "TTC") { 429 ymc32_command = 10; 430 init_telemetry_data("0"); 431 webSocketServer.sendData("R:" + cmd + " - MTT Sent"); 432 } 433 if (subcommand == "SPD") { 434 ymc32_command = 11; 435 init_telemetry_data("0"); 436 webSocketServer.sendData("R:" + cmd + " - Save PID Sent"); 437 } 438 if (subcommand == "RTH") { 439 ymc32_command = 12; 440 init_telemetry_data("0"); 441 webSocketServer.sendData("R:" + cmd + " - RTH Sent"); 442 } 443 if (subcommand == "RDC") { 444 ymc32_command = 99; 445 init_telemetry_data("0"); 446 webSocketServer.sendData("R:" + cmd + " - Drop Requested"); 447 } 448 break; 449 default: 450 break; 451 } 452 453 // process response 454 switch (cmd.toInt()) { 455 // minus response 456 case 20: 457 webSocketServer.sendData("R:" + cmd + " - " + subcommand); 458 break; 459 // plus response 460 case 21: 461 webSocketServer.sendData("R:" + cmd + " - " + subcommand); 462 break; 463 case 30: 464 break; 465 case 40: 466 break; 467 case 50: 468 break; 469 default: 470 webSocketServer.sendData("E:" + cmd + " - " + subcommand); 471 break; 472 } 473 } 474 } 475 476 // Background Process 2 477 if(Serial1.available()) { //If there are bytes available. 478 receive_byte = Serial1.read(); //Load them in the received_buffer array. 479 switch (receive_state) { 480 // waiting for start 481 case 1: 482 if(receive_byte == 'B') { 483 if(receive_byte_previous == 'J') { 484 receive_buffer_counter = 2; 485 receive_buffer[0] = 'J'; 486 receive_buffer[1] = 'B'; 487 receive_state = 2; 488 } 489 } 490 receive_byte_previous = receive_byte; 491 break; 492 // building buffer 493 case 2: 494 receive_buffer[receive_buffer_counter++] = receive_byte; 495 // see if we have a valid buffer 496 if(receive_buffer_counter == rec_telemetry_last_byte) { 497 check_byte = 0; //Reset the check_byte variable. 498 for(temp_byte=0;temp_byte < (rec_telemetry_last_byte - 1); temp_byte ++) { 499 check_byte ^= receive_buffer[temp_byte]; //Calculate the check_byte. 500 } 501 // valid buffer 502 if(check_byte == receive_buffer[(rec_telemetry_last_byte - 1)]) { 503 get_data(); //If there are two start signatures detected there could be a complete data set available. 504 process_data(); 505 if(TerminalAttached) { 506 print_telemetry_data(); 507 } 508 509 // send status up date to webserver 510 if(socketClient.connected()) { 511 webpage_data(); 512 } 513 514 } else { 515 receive_byte_previous = receive_byte; 516 receive_state = 1; 517 } 518 } else if (receive_buffer_counter > rec_telemetry_last_byte) { 519 receive_byte_previous = receive_byte; 520 receive_state = 1; 521 } 522 break; 523 } 524 } 525 526 // Background Process 3 527 // see if we have something to send, if so do it 528 if(ready_to_send == 1) { 529 send_telemetry_data(); 530 } 531 532 // Background Process 4 533 // background delay and heart beat 534 if(led == 0) { 535 led = 1; 536 digitalWrite(LED_BUILTIN, HIGH); 537 } else { 538 led = 0; 539 digitalWrite(LED_BUILTIN, LOW); 540 } 541} 542 543//When there are two start signatures received the received data between them can be tested to se if it is a valid data stream. 544void get_data(void){ 545 current_receive = millis() - last_receive; 546 last_receive = millis(); //Remember when this reception has arrived. 547 //In the following lines the different variables are restored from the valid data stream. 548 //The name of the variables are the same as in the YMFC-32 flight controller program. 549 error = receive_buffer[2]; 550 flight_mode = receive_buffer[3]; 551 debug_byte = receive_buffer[4]; 552 temperature = receive_buffer[5] | receive_buffer[6] << 8; 553 roll_angle = receive_buffer[7] - 100; 554 pitch_angle = receive_buffer[8] - 100; 555 start_byte = receive_buffer[9]; 556 altitude_meters = (receive_buffer[10] | receive_buffer[11] << 8) - 1000; 557 takeoff_throttle = receive_buffer[12] | receive_buffer[13] << 8; 558 actual_compass_heading = receive_buffer[14] | receive_buffer[15] << 8; 559 heading_lock = receive_buffer[16]; 560 number_used_sats = receive_buffer[17]; 561 fix_type = receive_buffer[18]; 562 l_lat_gps = (int32_t)receive_buffer[19] | (int32_t)receive_buffer[20] << 8 | (int32_t)receive_buffer[21] << 16 | (int32_t)receive_buffer[22] << 24; 563 l_lon_gps = (int32_t)receive_buffer[23] | (int32_t)receive_buffer[24] << 8 | (int32_t)receive_buffer[25] << 16 | (int32_t)receive_buffer[26] << 24; 564 loop_timer = (int32_t)receive_buffer[27] | (int32_t)receive_buffer[28] << 8 | (int32_t)receive_buffer[29] << 16 | (int32_t)receive_buffer[30] << 24; 565 pid_p_gain_roll = (float)(receive_buffer[31] | receive_buffer[32] << 8)/1000; 566 pid_i_gain_roll = (float)(receive_buffer[33] | receive_buffer[34] << 8)/1000; 567 pid_d_gain_roll = (float)(receive_buffer[35] | receive_buffer[36] << 8)/1000; 568 pid_p_gain_yaw = (float)(receive_buffer[37] | receive_buffer[38] << 8)/1000; 569 pid_i_gain_yaw = (float)(receive_buffer[39] | receive_buffer[40] << 8)/1000; 570 pid_d_gain_yaw = (float)(receive_buffer[41] | receive_buffer[42] << 8)/1000; 571 pid_p_gain_altitude = (float)(receive_buffer[43] | receive_buffer[44] << 8)/1000; 572 pid_i_gain_altitude = (float)(receive_buffer[45] | receive_buffer[46] << 8)/1000; 573 pid_d_gain_altitude = (float)(receive_buffer[47] | receive_buffer[48] << 8)/1000; 574 battery_voltage = (float)(receive_buffer[49] | receive_buffer[50] << 8)/100; 575 manual_takeoff = receive_buffer[51] | receive_buffer[52] << 8; 576 return_to_home_command = receive_buffer[53]; 577} 578 579//Process the data for the Web page 580void process_data(void){ 581 //System Status 582 //create battery min and max values 583 if((battery_voltage <= battery_voltage_min) | (battery_voltage_min == 0)) { 584 battery_voltage_min = battery_voltage; 585 } 586 if(battery_voltage >= battery_voltage_max) { 587 battery_voltage_max = battery_voltage; 588 } 589 590 //telemetry processing time 591 if((current_receive <= current_receive_min) | ( current_receive_min == 0)) { 592 current_receive_min = current_receive; 593 } 594 if(current_receive >= current_receive_max) { 595 current_receive_max = current_receive; 596 } 597 598 //loop_timer processing time 599 if((loop_timer <= loop_timer_min) | ( loop_timer_min == 0)) { 600 loop_timer_min = loop_timer; 601 } 602 if(loop_timer >= loop_timer_max) { 603 loop_timer_max = loop_timer; 604 } 605 606 // Flight Status 607 //Roll angle 608 if((roll_angle <= roll_angle_min) | ( roll_angle_min == 0)) { 609 roll_angle_min = roll_angle; 610 } 611 if(roll_angle >= roll_angle_max) { 612 roll_angle_max = roll_angle; 613 } 614 615 //Pitch angle 616 if((pitch_angle <= pitch_angle_min) | ( pitch_angle_min == 0)) { 617 pitch_angle_min = pitch_angle; 618 } 619 if(pitch_angle >= pitch_angle_max) { 620 pitch_angle_max = pitch_angle; 621 } 622 623 //Altitude Meters 624 if((altitude_meters <= altitude_meters_min) | ( altitude_meters_min == 0)) { 625 altitude_meters_min = altitude_meters; 626 } 627 if(altitude_meters >= altitude_meters_max) { 628 altitude_meters_max = altitude_meters; 629 } 630 631 //Temperature 632 if((temperature <= temperature_min) | ( temperature_min == 0)) { 633 temperature_min = temperature; 634 } 635 if(temperature >= temperature_max) { 636 temperature_max = temperature; 637 } 638} 639 640//Process the data for the Web page 641void reset_data(void){ 642 ymc32_command = 0; 643 ymc32_fval = 0; 644 check_byte = 0; 645 ready_to_send = 1; 646 battery_voltage_min = battery_voltage_max = 0; 647 current_receive_min = current_receive_max = 0; 648 loop_timer_min = loop_timer_max = 0; 649 roll_angle_min = roll_angle_max = 0; 650 pitch_angle_min = pitch_angle_max = 0; 651 altitude_meters_min = altitude_meters_max = 0; 652 temperature_min = temperature_max = 0; 653} 654
Code Repo
All code for the system.
Downloadable files
GitHub Repo
All documentation for the drone
https://github.com/dmytyk/YMFC-32
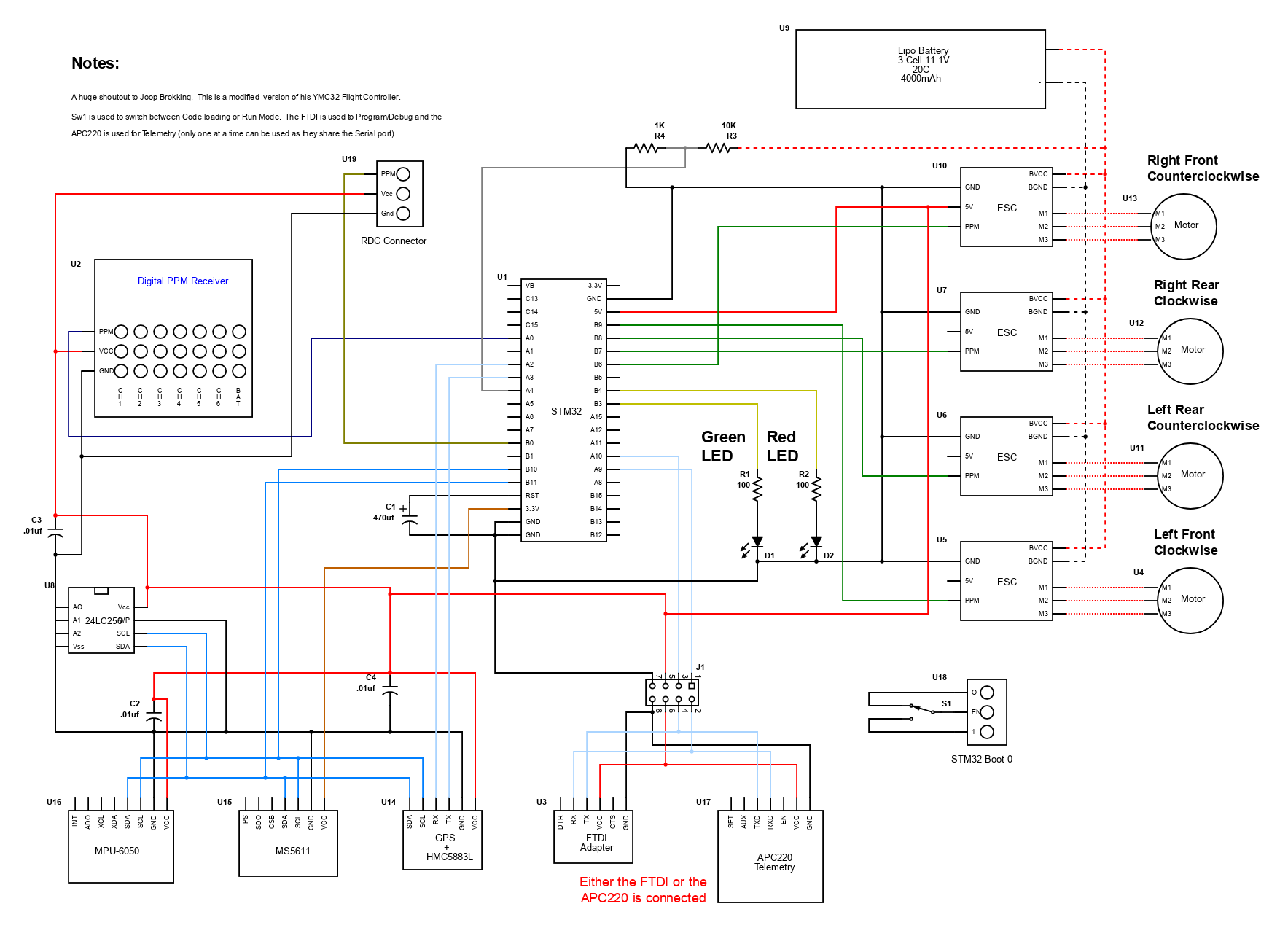
Schematic
Full hardware schematic
Schematic
Comments
Only logged in users can leave comments