Devices & Components
1
Arduino Uno Rev3
2
18650 battery
1
LED (generic)
1
Jumper wires (generic)
1
L298D motor driver
1
HC-06 Bluetooth Module
1
4wd robot car chassi
1
Slide Switch
Hardware & Tools
1
Multitool, Screwdriver
Software & Tools
1
arduino car
Project description
Code
car code
arduino
1char t; 2 long g=1000; 3void setup() { 4pinMode(13,OUTPUT); //left motors forward 5pinMode(12,OUTPUT); //left motors reverse 6pinMode(11,OUTPUT); //right motors forward 7pinMode(10,OUTPUT); //right motors reverse 8pinMode(9,OUTPUT);//Led 9pinMode(8,OUTPUT);//BACK LIGHT 10Serial.begin(9600); 11 12} 13 14void loop() { 15if(Serial.available()){ 16 t = Serial.read(); 17 Serial.println(t); 18} 19 20if(t == 'F'){ //move forward(all motors rotate in forward direction) 21 digitalWrite(13,HIGH); 22 digitalWrite(11,HIGH); 23} 24 25else if(t == 'B'){ //move reverse (all motors rotate in reverse direction) 26 digitalWrite(12,HIGH); 27 digitalWrite(10,HIGH); 28 29} 30 31else if(t == 'L'){ //turn right (left side motors rotate in forward direction,) 32 digitalWrite(11,HIGH); 33 digitalWrite(12,HIGH); 34 digitalWrite(9,HIGH); 35 36 37 38 39} 40 41else if(t == 'R'){ //turn left (right side motors rotate in forward direction, ) 42 digitalWrite(13,HIGH); 43 digitalWrite(10,HIGH); 44 digitalWrite(9,HIGH); 45 46} 47 48else if(t == 'W'){ //turn led on or off) 49 digitalWrite(9,HIGH); 50 51} 52else if(t == 'w'){ 53 digitalWrite(9,LOW); 54 55} 56else if(t=='w'){ 57 digitalWrite(8,HIGH); //turn back led on 58} 59else if(t=='w'){ 60 digitalWrite(8,LOW); 61} 62else if(t=='M'){ 63 digitalWrite(8,HIGH); 64 65} 66else if(t=='m'){ 67 digitalWrite(8,LOW); 68 69} 70 71else if(t == 'S'){ //STOP (all motors stop) 72 digitalWrite(13,LOW); 73 digitalWrite(12,LOW); 74 digitalWrite(11,LOW); 75 digitalWrite(10,LOW); 76 digitalWrite(9,LOW); 77 digitalWrite(8,LOW); 78} 79delay(100); 80} 81
car code
arduino
1char t; 2 long g=1000; 3void setup() { 4pinMode(13,OUTPUT); //left 5 motors forward 6pinMode(12,OUTPUT); //left motors reverse 7pinMode(11,OUTPUT); 8 //right motors forward 9pinMode(10,OUTPUT); //right motors reverse 10pinMode(9,OUTPUT);//Led 11pinMode(8,OUTPUT);//BACK 12 LIGHT 13Serial.begin(9600); 14 15} 16 17void loop() { 18if(Serial.available()){ 19 20 t = Serial.read(); 21 Serial.println(t); 22} 23 24if(t == 'F'){ //move 25 forward(all motors rotate in forward direction) 26 digitalWrite(13,HIGH); 27 28 digitalWrite(11,HIGH); 29} 30 31else if(t == 'B'){ //move reverse (all 32 motors rotate in reverse direction) 33 digitalWrite(12,HIGH); 34 digitalWrite(10,HIGH); 35 36 37} 38 39else if(t == 'L'){ //turn right (left side motors rotate in 40 forward direction,) 41 digitalWrite(11,HIGH); 42 digitalWrite(12,HIGH); 43 44 digitalWrite(9,HIGH); 45 46 47 48 49} 50 51else if(t == 'R'){ //turn 52 left (right side motors rotate in forward direction, ) 53 digitalWrite(13,HIGH); 54 55 digitalWrite(10,HIGH); 56 digitalWrite(9,HIGH); 57 58} 59 60else if(t == 61 'W'){ //turn led on or off) 62 digitalWrite(9,HIGH); 63 64} 65else if(t 66 == 'w'){ 67 digitalWrite(9,LOW); 68 69} 70else if(t=='w'){ 71 digitalWrite(8,HIGH); 72 //turn back led on 73} 74else if(t=='w'){ 75 digitalWrite(8,LOW); 76} 77else 78 if(t=='M'){ 79 digitalWrite(8,HIGH); 80 81} 82else if(t=='m'){ 83 digitalWrite(8,LOW); 84 85 86} 87 88else if(t == 'S'){ //STOP (all motors stop) 89 digitalWrite(13,LOW); 90 91 digitalWrite(12,LOW); 92 digitalWrite(11,LOW); 93 digitalWrite(10,LOW); 94 95 digitalWrite(9,LOW); 96 digitalWrite(8,LOW); 97} 98delay(100); 99} 100
Downloadable files
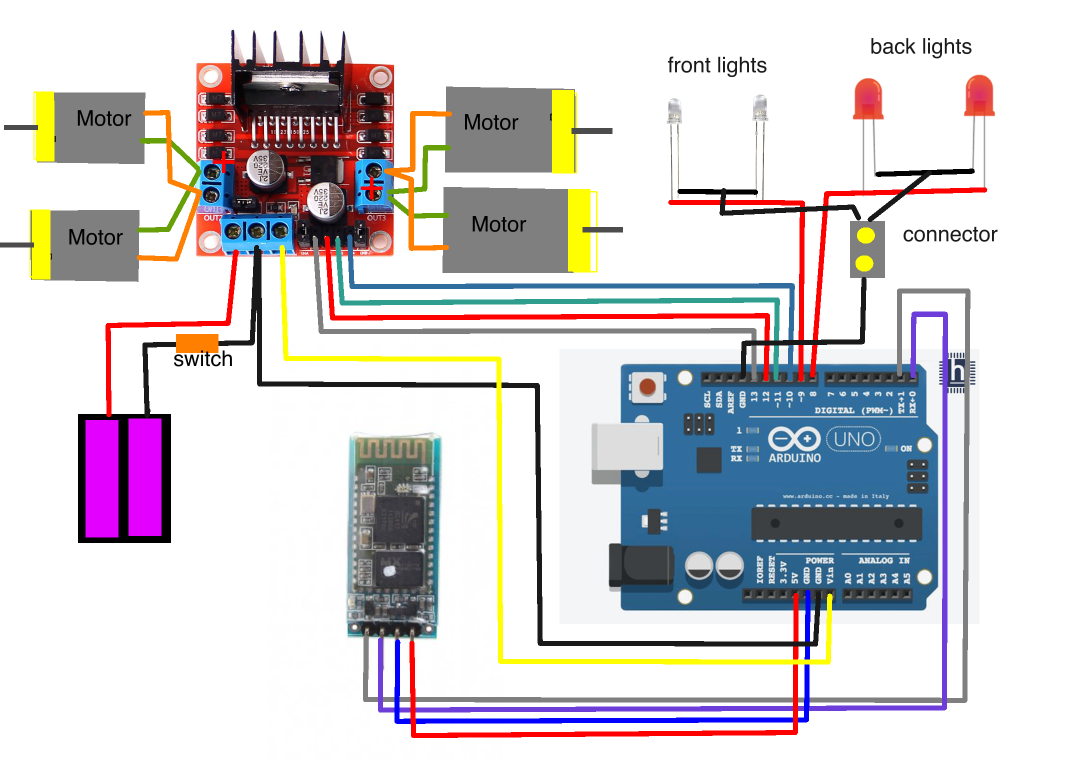
bluetooth car diagram
bluetooth car diagram
Comments
Only logged in users can leave comments