Servo controller using Arduino Bluetooth module
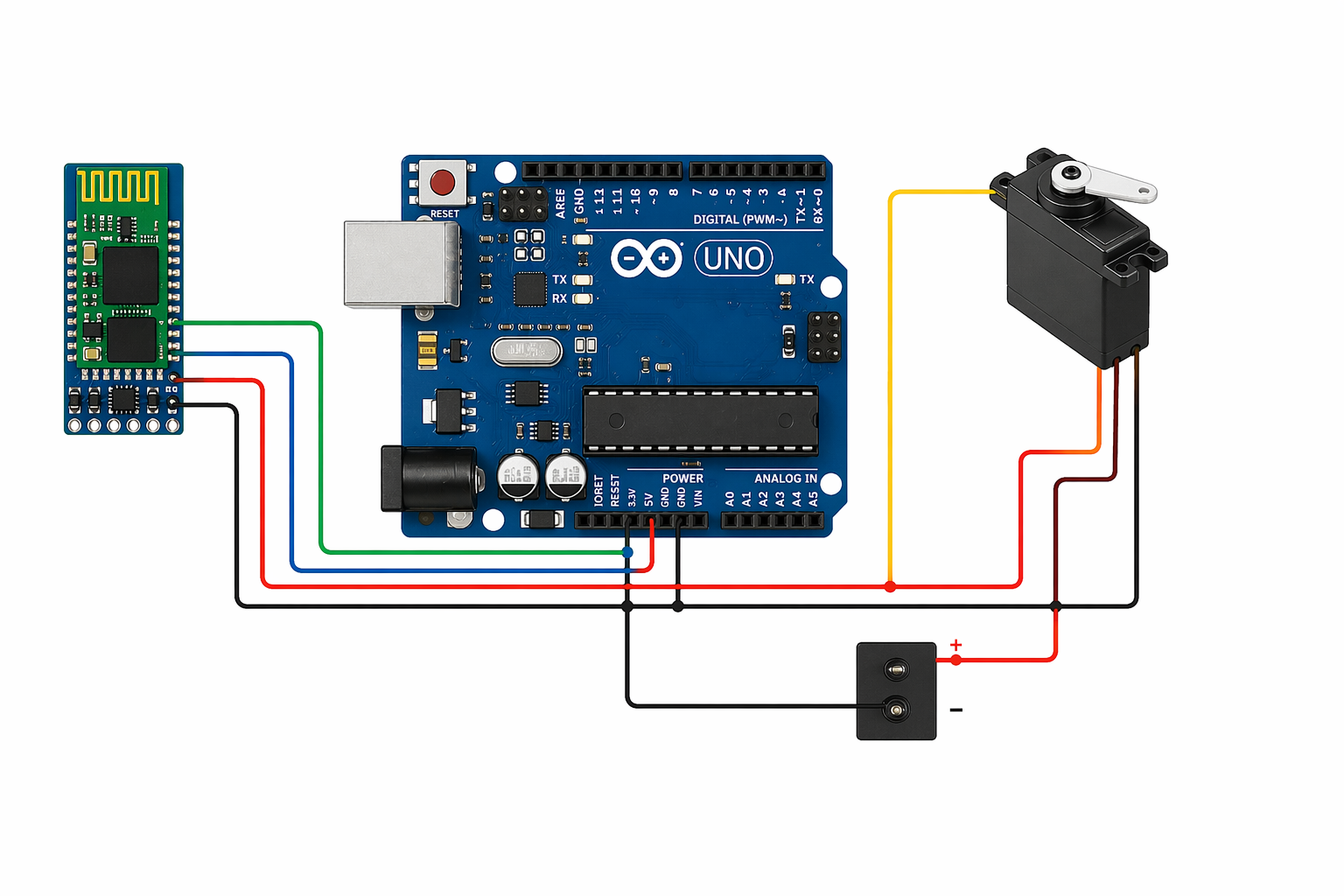
Control a servo motor wirelessly using Arduino and HC-05 Bluetooth module send angle commands straight from your smartphone, no wires needed.
Devices & Components
1
Grove - Servo
1
Arduino® UNO R4 WiFi
Software & Tools
Arduino IDE
Project description
Code
servo_bluetooth_controller
1/* 2 ============================================ 3 Servo Controller via Bluetooth (HC-05/HC-06) 4 Arduino Uno + Bluetooth Module + Servo Motor 5 ============================================ 6 7 Connections: 8 - HC-05/HC-06 TX --> Arduino Pin 10 (RX) 9 - HC-05/HC-06 RX --> Arduino Pin 11 (TX) [via voltage divider] 10 - HC-05/HC-06 VCC --> 5V 11 - HC-05/HC-06 GND --> GND 12 - Servo Signal --> Arduino Pin 9 13 - Servo VCC --> 5V 14 - Servo GND --> GND 15 16 Commands (send via Bluetooth terminal app): 17 - '0' to '9' : Move to preset positions (0°, 20°, 40°...180°) 18 - 'A' to 'Z' : Set angle directly (A=0°, Z=180°) 19 - 'F' : Forward (increase angle by 10°) 20 - 'B' : Backward (decrease angle by 10°) 21 - 'C' : Center (90°) 22 - 'M' : Min position (0°) 23 - 'X' : Max position (180°) 24 - Number 0-180: Direct angle input (send followed by '#') 25 26 Example App: "Serial Bluetooth Terminal" (Android/iOS) 27*/ 28 29#include <Servo.h> 30#include <SoftwareSerial.h> 31 32// Pin Definitions 33#define SERVO_PIN 9 // Servo signal pin 34#define BT_RX_PIN 10 // Connect to HC-05 TX 35#define BT_TX_PIN 11 // Connect to HC-05 RX 36 37// Servo angle limits 38#define MIN_ANGLE 0 39#define MAX_ANGLE 180 40#define CENTER_ANGLE 90 41#define STEP_SIZE 10 // Degrees per step for F/B command 42 43// Objects 44Servo myServo; 45SoftwareSerial bluetooth(BT_RX_PIN, BT_TX_PIN); 46 47// Variables 48int currentAngle = CENTER_ANGLE; 49String inputBuffer = ""; 50bool readingNumber = false; 51 52void setup() { 53 // Initialize Serial Monitor 54 Serial.begin(9600); 55 Serial.println("=== Servo Bluetooth Controller ==="); 56 Serial.println("Waiting for Bluetooth connection..."); 57 58 // Initialize Bluetooth 59 bluetooth.begin(9600); // Default baud rate for HC-05/HC-06 60 61 // Initialize Servo 62 myServo.attach(SERVO_PIN); 63 myServo.write(CENTER_ANGLE); 64 currentAngle = CENTER_ANGLE; 65 66 // Send welcome message via Bluetooth 67 delay(1000); 68 bluetooth.println("=== Servo Controller Ready ==="); 69 bluetooth.println("Commands: F=Forward, B=Back, C=Center"); 70 bluetooth.println("M=Min(0), X=Max(180), 0-9=Preset"); 71 bluetooth.print("Current Angle: "); 72 bluetooth.println(currentAngle); 73} 74 75void loop() { 76 // Check for Bluetooth data 77 if (bluetooth.available()) { 78 char received = (char)bluetooth.read(); 79 handleCommand(received); 80 } 81 82 // Check for Serial Monitor data (for testing) 83 if (Serial.available()) { 84 char received = (char)Serial.read(); 85 handleCommand(received); 86 } 87} 88 89void handleCommand(char cmd) { 90 // Convert lowercase to uppercase 91 if (cmd >= 'a' && cmd <= 'z') { 92 cmd = cmd - 32; 93 } 94 95 Serial.print("Received: "); 96 Serial.println(cmd); 97 98 // Number input mode (for direct angle 0-180) 99 if (cmd == '#') { 100 // End of number input 101 if (readingNumber && inputBuffer.length() > 0) { 102 int angle = inputBuffer.toInt(); 103 setServoAngle(angle); 104 inputBuffer = ""; 105 readingNumber = false; 106 } 107 return; 108 } 109 110 if (cmd >= '0' && cmd <= '9' && readingNumber) { 111 inputBuffer += cmd; 112 return; 113 } 114 115 // Process single character commands 116 switch (cmd) { 117 case 'F': // Forward - increase angle 118 moveForward(); 119 break; 120 121 case 'B': // Backward - decrease angle 122 moveBackward(); 123 break; 124 125 case 'C': // Center position 126 setServoAngle(CENTER_ANGLE); 127 sendStatus("Center"); 128 break; 129 130 case 'M': // Minimum position 131 setServoAngle(MIN_ANGLE); 132 sendStatus("Minimum"); 133 break; 134 135 case 'X': // Maximum position 136 setServoAngle(MAX_ANGLE); 137 sendStatus("Maximum"); 138 break; 139 140 case 'S': // Sweep mode 141 sweepServo(); 142 break; 143 144 case '?': // Status request 145 sendStatus("Status"); 146 break; 147 148 // Preset positions 0-9 (maps to 0°, 20°, 40°...180°) 149 case '0': setServoAngle(0); sendStatus("Preset 0"); break; 150 case '1': setServoAngle(20); sendStatus("Preset 1"); break; 151 case '2': setServoAngle(40); sendStatus("Preset 2"); break; 152 case '3': setServoAngle(60); sendStatus("Preset 3"); break; 153 case '4': setServoAngle(80); sendStatus("Preset 4"); break; 154 case '5': setServoAngle(90); sendStatus("Preset 5"); break; 155 case '6': setServoAngle(100); sendStatus("Preset 6"); break; 156 case '7': setServoAngle(120); sendStatus("Preset 7"); break; 157 case '8': setServoAngle(150); sendStatus("Preset 8"); break; 158 case '9': setServoAngle(180); sendStatus("Preset 9"); break; 159 160 // Direct angle via letters (A=0° to Z=180°, ~7° per letter) 161 default: 162 if (cmd >= 'A' && cmd <= 'Z') { 163 int angle = map(cmd - 'A', 0, 25, 0, 180); 164 setServoAngle(angle); 165 sendStatus("Letter Command"); 166 } else if (cmd >= '0' && cmd <= '9') { 167 // Start number input mode 168 readingNumber = true; 169 inputBuffer = String(cmd); 170 } 171 break; 172 } 173} 174 175void setServoAngle(int angle) { 176 // Constrain angle within limits 177 angle = constrain(angle, MIN_ANGLE, MAX_ANGLE); 178 179 // Move servo smoothly 180 smoothMove(currentAngle, angle); 181 currentAngle = angle; 182 183 // Send feedback 184 String msg = "Angle: " + String(currentAngle) + " degrees"; 185 bluetooth.println(msg); 186 Serial.println(msg); 187} 188 189void smoothMove(int fromAngle, int toAngle) { 190 int step = (toAngle > fromAngle) ? 1 : -1; 191 192 for (int pos = fromAngle; pos != toAngle; pos += step) { 193 myServo.write(pos); 194 delay(15); // Smooth movement delay 195 } 196 myServo.write(toAngle); 197} 198 199void moveForward() { 200 int newAngle = currentAngle + STEP_SIZE; 201 if (newAngle > MAX_ANGLE) { 202 newAngle = MAX_ANGLE; 203 bluetooth.println("Already at Maximum!"); 204 } else { 205 setServoAngle(newAngle); 206 sendStatus("Forward"); 207 } 208} 209 210void moveBackward() { 211 int newAngle = currentAngle - STEP_SIZE; 212 if (newAngle < MIN_ANGLE) { 213 newAngle = MIN_ANGLE; 214 bluetooth.println("Already at Minimum!"); 215 } else { 216 setServoAngle(newAngle); 217 sendStatus("Backward"); 218 } 219} 220 221void sweepServo() { 222 bluetooth.println("Sweeping..."); 223 Serial.println("Sweep started"); 224 225 // Sweep from current to max 226 smoothMove(currentAngle, MAX_ANGLE); 227 delay(500); 228 229 // Sweep from max to min 230 smoothMove(MAX_ANGLE, MIN_ANGLE); 231 delay(500); 232 233 // Return to center 234 smoothMove(MIN_ANGLE, CENTER_ANGLE); 235 currentAngle = CENTER_ANGLE; 236 237 bluetooth.println("Sweep complete! At Center."); 238 Serial.println("Sweep complete"); 239} 240 241void sendStatus(String action) { 242 String status = "[" + action + "] Angle=" + String(currentAngle) + "°"; 243 bluetooth.println(status); 244 Serial.println(status); 245}
Downloadable files
arduino uno
arduino uno.png
Comments
Only logged in users can leave comments