Controll Servo with Potentiometer
How to controll a Servo with Potentiometer!
Devices & Components
1
Arduino Uno Rev3
1
SG90 Micro-servo motor
1
Breadboard (generic)
1
Rotary Potentiometer, 10 kohm
8
Jumper wires (generic)
Project description
Code
code to controll servo with potentiometer
c_cpp
copy paste or write it your self!
code to controll servo with potentiometer
c_cpp
copy paste or write it your self!
Downloadable files
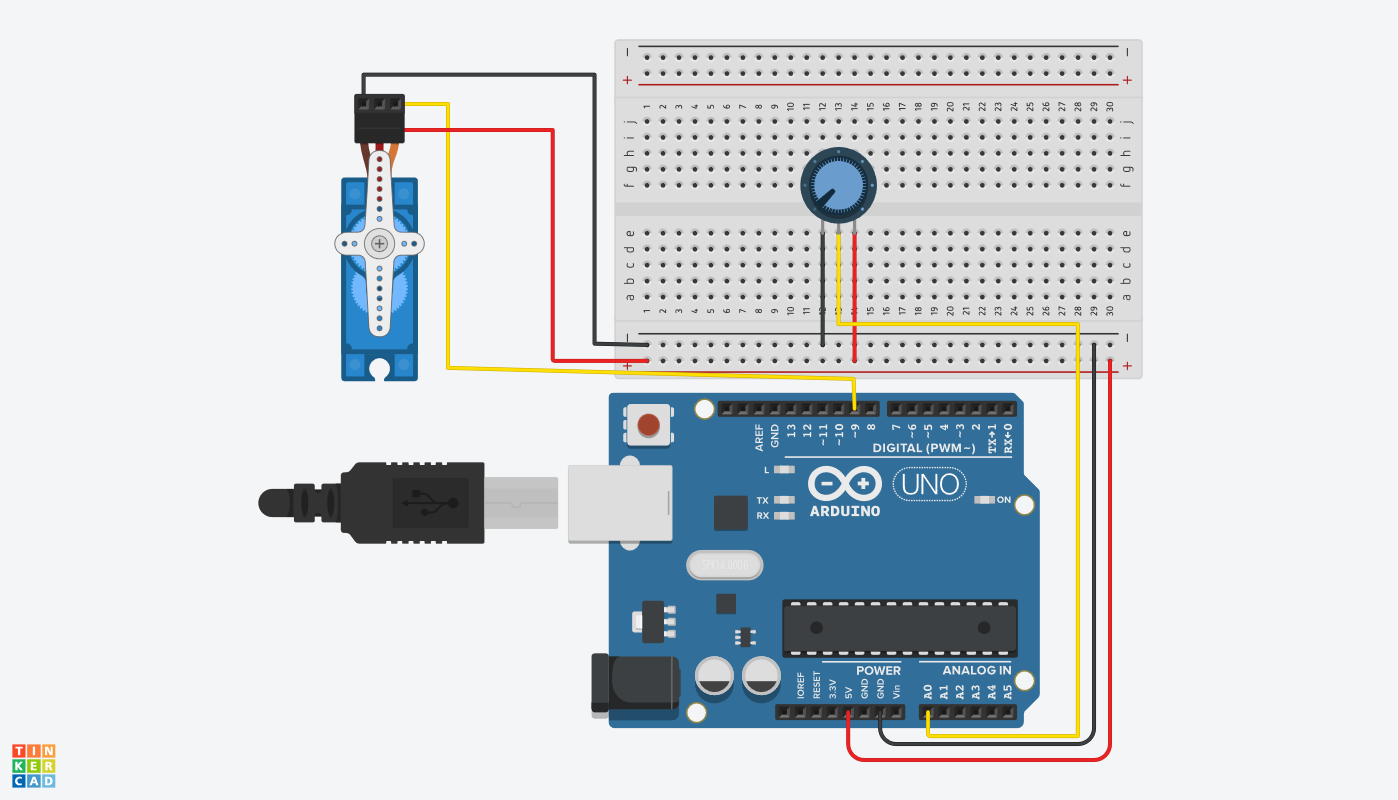
Schematic
Schematic
Comments
Only logged in users can leave comments