AGRITECH: eliminate manual labour in agricultural fields…
A smart scarecrow on the field to keep a track of climatic condition. For need of irrigation/pesticides a drone will be sent to the field.
Devices & Components
Arduino Nano
Solo Propellers
Slide Switch
Female/Female Jumper Wires
Toggle Switch, (On)-Off-(On)
Joystick, 2
9V battery (generic)
nRF24 Module (Generic)
Jumper wires (generic)
lipo Battery
Zero PCB
DHT11 Temperature & Humidity Sensor (4 pins)
Brushless Motor
Step-Up Voltage Regulator - 3.3V
Male-Header 36 Position 1 Row- Long (0.1")
Gas Detection Sensor, Methane
SparkFun Soil Moisture Sensor (with Screw Terminals)
6 DOF Sensor - MPU6050
NodeMCU ESP8266 Breakout Board
Electronic Speed Controller
Hardware & Tools
Mastech MS8217 Autorange Digital Multimeter
Soldering iron (generic)
Wire Stripper & Cutter, 18-10 AWG / 0.75-4mm² Capacity Wires
Software & Tools
Blynk
Arduino IDE
Project description
Code
Field Monitoring
c_cpp
1#define BLYNK_PRINT Serial 2#include <ESP8266WiFi.h> 3#include <BlynkSimpleEsp8266.h> 4#include "DHT.h" // including the library of DHT11 temperature and humidity sensor 5#include <SimpleTimer.h> //including the library of SimpleTimer 6#define DHTTYPE DHT11 // DHT 11 7 8#define dht_dpin 14 9DHT dht(dht_dpin, DHTTYPE); 10SimpleTimer timer; 11char auth[] = "cT1dmlOyqPKItDGq2FJeWXOaM5YleN3c"; 12char ssid[] = "diksha"; 13char pass[] = "diksha19"; 14const int sensor_pin = A0;//* Connect Soil moisture analog sensor pin to A0 of NodeMCU */ 15float t; // Declare the variables 16float h; 17void setup() { 18 Serial.begin(9600); 19 20 Blynk.begin(auth,ssid,pass); //wifi name and password 21 pinMode(sensor_pin, INPUT);/* Define baud rate for serial communication */ 22 dht.begin(); 23 timer.setInterval(2000, sendUptime); 24} 25 26void sendUptime() 27{ 28 29 float h = dht.readHumidity(); 30 float t = dht.readTemperature(); 31 Serial.println("Humidity and temperature\ 32\ 33"); 34 Serial.print("Current humidity = "); 35 Serial.print(h); 36 Serial.print("% "); 37 Serial.print("temperature = "); 38 Serial.print(t); 39 Blynk.virtualWrite(V0, t); 40 Blynk.virtualWrite(V1, h); 41 42} 43 44 45void loop() 46{ 47Blynk.run(); 48timer.run(); 49 50 float moisture_percentage; 51 52 moisture_percentage = ( 100.00 - ( (analogRead(sensor_pin)/1023.00) * 100.00 ) ); 53 54 Serial.print("Soil Moisture(in Percentage) = "); 55 Serial.print(moisture_percentage); 56 Serial.println("%"); 57 Blynk.virtualWrite(V4,moisture_percentage); 58 59 if (moisture_percentage<=50) { 60 Serial.println("i need water.."); 61 Blynk.notify("I need water.."); 62 } 63 else { 64 Serial.println("no water needed");} 65 66 delay(1000); 67} 68
Drone Receiver
c_cpp
1#include <SPI.h> 2#include <nRF24L01.h> 3#include <RF24.h> 4const 5 uint64_t pipeIn = 0xE8E8F0F0E1LL; //Remember that this code is the same as in the 6 transmitter 7 8RF24 radio(9, 10); 9 10//We could use up to 32 channels 11struct 12 MyData { 13byte throttle; //We define each byte of data input, in this case just 14 6 channels 15byte yaw; 16byte pitch; 17byte roll; 18byte AUX1; 19byte AUX2; 20}; 21 22MyData 23 data; 24 25void resetData() 26{ 27//We define the inicial value of each data 28 input 29//3 potenciometers will be in the middle position so 127 is the middle 30 from 254 31data.throttle = 0; 32data.yaw = 127; 33data.pitch = 127; 34data.roll 35 = 127; 36data.AUX1 = 0; 37data.AUX2 = 0; 38 39} 40 41/**************************************************/ 42 43void 44 setup() 45{ 46Serial.begin(250000); //Set the speed to 9600 bauds if you want. 47//You 48 should always have the same speed selected in the serial monitor 49resetData(); 50radio.begin(); 51radio.setAutoAck(false); 52radio.setDataRate(RF24_250KBPS); 53 54radio.openReadingPipe(1,pipeIn); 55//we 56 start the radio comunication 57radio.startListening(); 58 59} 60 61/**************************************************/ 62 63unsigned 64 long lastRecvTime = 0; 65 66void recvData() 67{ 68while ( radio.available() 69 ) { 70radio.read(&data, sizeof(MyData)); 71lastRecvTime = millis(); //here we 72 receive the data 73} 74} 75 76/**************************************************/ 77 78void 79 loop() 80{ 81recvData(); 82unsigned long now = millis(); 83//Here we check if 84 we've lost signal, if we did we reset the values 85if ( now - lastRecvTime > 1000 86 ) { 87// Signal lost? 88resetData(); 89} 90 91Serial.print("Throttle: "); 92 Serial.print(data.throttle); Serial.print(" "); 93Serial.print("Yaw: "); 94 Serial.print(data.yaw); Serial.print(" "); 95Serial.print("Pitch: 96 "); Serial.print(data.pitch); Serial.print(" "); 97Serial.print("Roll: 98 "); Serial.print(data.roll); Serial.print(" "); 99Serial.print("Aux1: 100 "); Serial.print(data.AUX1); Serial.print(" "); 101Serial.print("Aux2: 102 "); Serial.print(data.AUX2); Serial.print("\ 103"); 104 105 106 107} 108 109/**************************************************/ 110
Drone Receiver
c_cpp
1#include <SPI.h> 2#include <nRF24L01.h> 3#include <RF24.h> 4const uint64_t pipeIn = 0xE8E8F0F0E1LL; //Remember that this code is the same as in the transmitter 5 6RF24 radio(9, 10); 7 8//We could use up to 32 channels 9struct MyData { 10byte throttle; //We define each byte of data input, in this case just 6 channels 11byte yaw; 12byte pitch; 13byte roll; 14byte AUX1; 15byte AUX2; 16}; 17 18MyData data; 19 20void resetData() 21{ 22//We define the inicial value of each data input 23//3 potenciometers will be in the middle position so 127 is the middle from 254 24data.throttle = 0; 25data.yaw = 127; 26data.pitch = 127; 27data.roll = 127; 28data.AUX1 = 0; 29data.AUX2 = 0; 30 31} 32 33/**************************************************/ 34 35void setup() 36{ 37Serial.begin(250000); //Set the speed to 9600 bauds if you want. 38//You should always have the same speed selected in the serial monitor 39resetData(); 40radio.begin(); 41radio.setAutoAck(false); 42radio.setDataRate(RF24_250KBPS); 43 44radio.openReadingPipe(1,pipeIn); 45//we start the radio comunication 46radio.startListening(); 47 48} 49 50/**************************************************/ 51 52unsigned long lastRecvTime = 0; 53 54void recvData() 55{ 56while ( radio.available() ) { 57radio.read(&data, sizeof(MyData)); 58lastRecvTime = millis(); //here we receive the data 59} 60} 61 62/**************************************************/ 63 64void loop() 65{ 66recvData(); 67unsigned long now = millis(); 68//Here we check if we've lost signal, if we did we reset the values 69if ( now - lastRecvTime > 1000 ) { 70// Signal lost? 71resetData(); 72} 73 74Serial.print("Throttle: "); Serial.print(data.throttle); Serial.print(" "); 75Serial.print("Yaw: "); Serial.print(data.yaw); Serial.print(" "); 76Serial.print("Pitch: "); Serial.print(data.pitch); Serial.print(" "); 77Serial.print("Roll: "); Serial.print(data.roll); Serial.print(" "); 78Serial.print("Aux1: "); Serial.print(data.AUX1); Serial.print(" "); 79Serial.print("Aux2: "); Serial.print(data.AUX2); Serial.print("\ 80"); 81 82 83 84} 85 86/**************************************************/ 87
Transmitter
c_cpp
1#include <SPI.h> 2#include <nRF24L01.h> 3#include <RF24.h> 4 5/*Create a unique pipe out. The receiver has to 6 wear the same unique code*/ 7 8const uint64_t pipeOut = 0xE8E8F0F0E1LL; //IMPORTANT: The same as in the receiver 9 10RF24 radio(9, 10); // select CSN pin 11 12// The sizeof this struct should not exceed 32 bytes 13// This gives us up to 32 8 bits channals 14struct MyData { 15 byte throttle; 16 byte yaw; 17 byte pitch; 18 byte roll; 19 byte AUX1; 20 byte AUX2; 21}; 22 23MyData data; 24 25void resetData() 26{ 27 //This are the start values of each channal 28 // Throttle is 0 in order to s/..//. top the motors 29 //127 is the middle value of the 10ADC. 30 31 data.throttle = 0; 32 data.yaw = 127; 33 data.pitch = 127; 34 data.roll = 127; 35 data.AUX1 = 0; 36 data.AUX2 = 0; 37} 38 39void setup() 40{ 41 //Start everything up 42 radio.begin(); 43 radio.setAutoAck(false); 44 radio.setDataRate(RF24_250KBPS); 45 radio.openWritingPipe(pipeOut); 46 resetData(); 47} 48 49/**************************************************/ 50 51// Returns a corrected value for a joystick position that takes into account 52// the values of the outer extents and the middle of the joystick range. 53int mapJoystickValues(int val, int lower, int middle, int upper, bool reverse) 54{ 55 val = constrain(val, lower, upper); 56 if ( val < middle ) 57 val = map(val, lower, middle, 0, 128); 58 else 59 val = map(val, middle, upper, 128, 255); 60 return ( reverse ? 255 - val : val ); 61} 62 63void loop() 64{ 65 // The calibration numbers used here should be measured 66 // for your joysticks till they send the correct values. 67 data.throttle = mapJoystickValues( analogRead(A0), 13, 524, 1015, true ); 68 data.yaw = mapJoystickValues( analogRead(A1), 1, 505, 1020, true ); 69 data.pitch = mapJoystickValues( analogRead(A2), 12, 544, 1021, true ); 70 data.roll = mapJoystickValues( analogRead(A3), 34, 522, 1020, true ); 71 data.AUX1 = digitalRead(7); //The 2 toggle switches 72 data.AUX2 = digitalRead(8); 73 74 radio.write(&data, sizeof(MyData)); 75} 76
Field Monitoring
c_cpp
1#define BLYNK_PRINT Serial 2#include <ESP8266WiFi.h> 3#include <BlynkSimpleEsp8266.h> 4#include "DHT.h" // including the library of DHT11 temperature and humidity sensor 5#include <SimpleTimer.h> //including the library of SimpleTimer 6#define DHTTYPE DHT11 // DHT 11 7 8#define dht_dpin 14 9DHT dht(dht_dpin, DHTTYPE); 10SimpleTimer timer; 11char auth[] = "cT1dmlOyqPKItDGq2FJeWXOaM5YleN3c"; 12char ssid[] = "diksha"; 13char pass[] = "diksha19"; 14const int sensor_pin = A0;//* Connect Soil moisture analog sensor pin to A0 of NodeMCU */ 15float t; // Declare the variables 16float h; 17void setup() { 18 Serial.begin(9600); 19 20 Blynk.begin(auth,ssid,pass); //wifi name and password 21 pinMode(sensor_pin, INPUT);/* Define baud rate for serial communication */ 22 dht.begin(); 23 timer.setInterval(2000, sendUptime); 24} 25 26void sendUptime() 27{ 28 29 float h = dht.readHumidity(); 30 float t = dht.readTemperature(); 31 Serial.println("Humidity and temperature\ 32\ 33"); 34 Serial.print("Current humidity = "); 35 Serial.print(h); 36 Serial.print("% "); 37 Serial.print("temperature = "); 38 Serial.print(t); 39 Blynk.virtualWrite(V0, t); 40 Blynk.virtualWrite(V1, h); 41 42} 43 44 45void loop() 46{ 47Blynk.run(); 48timer.run(); 49 50 float moisture_percentage; 51 52 moisture_percentage = ( 100.00 - ( (analogRead(sensor_pin)/1023.00) * 100.00 ) ); 53 54 Serial.print("Soil Moisture(in Percentage) = "); 55 Serial.print(moisture_percentage); 56 Serial.println("%"); 57 Blynk.virtualWrite(V4,moisture_percentage); 58 59 if (moisture_percentage<=50) { 60 Serial.println("i need water.."); 61 Blynk.notify("I need water.."); 62 } 63 else { 64 Serial.println("no water needed");} 65 66 delay(1000); 67} 68
Downloadable files
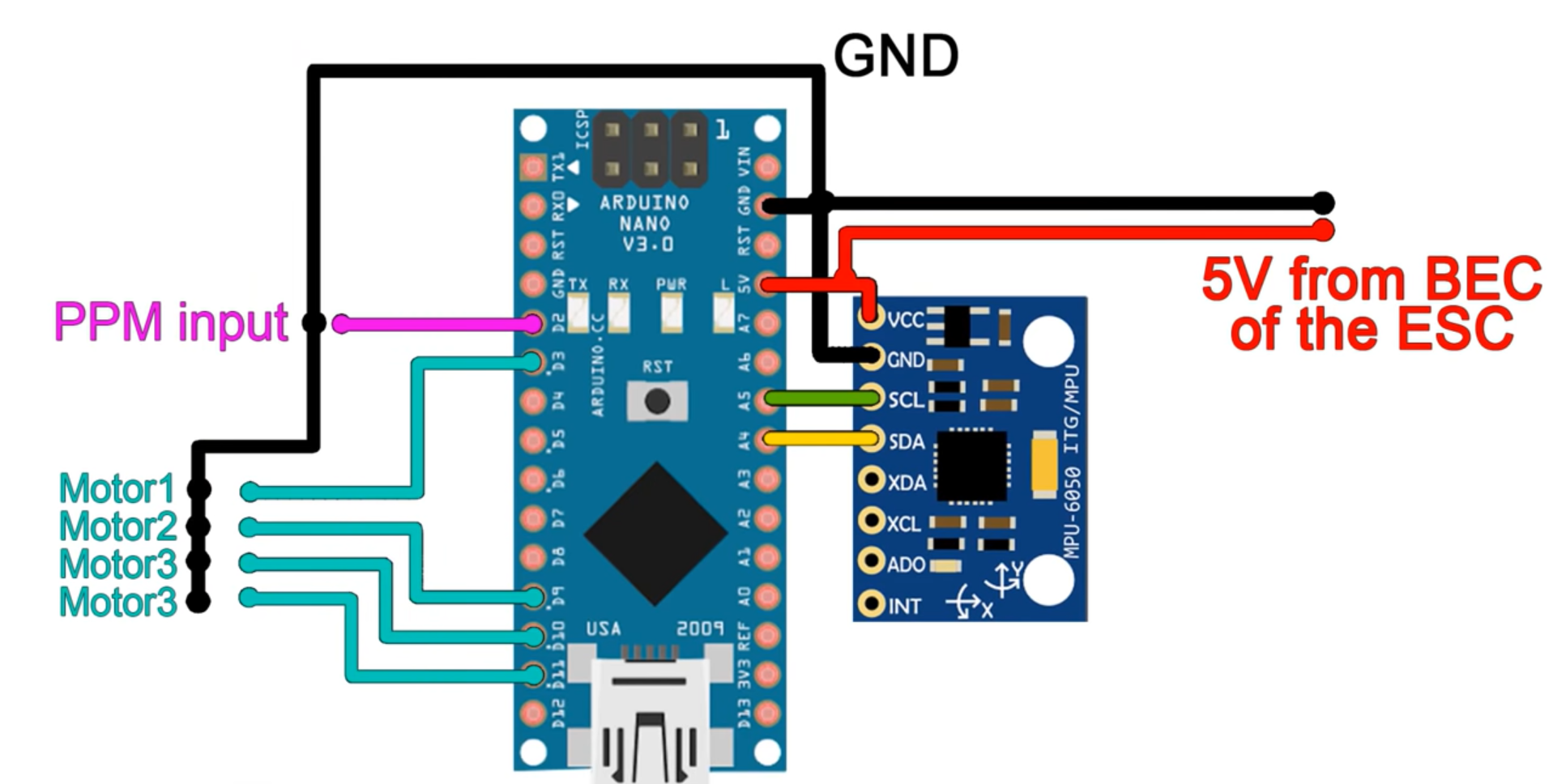
Flight Controller Circuit
Flight Controller Circuit
Transmitter Circuit
Transmitter Circuit
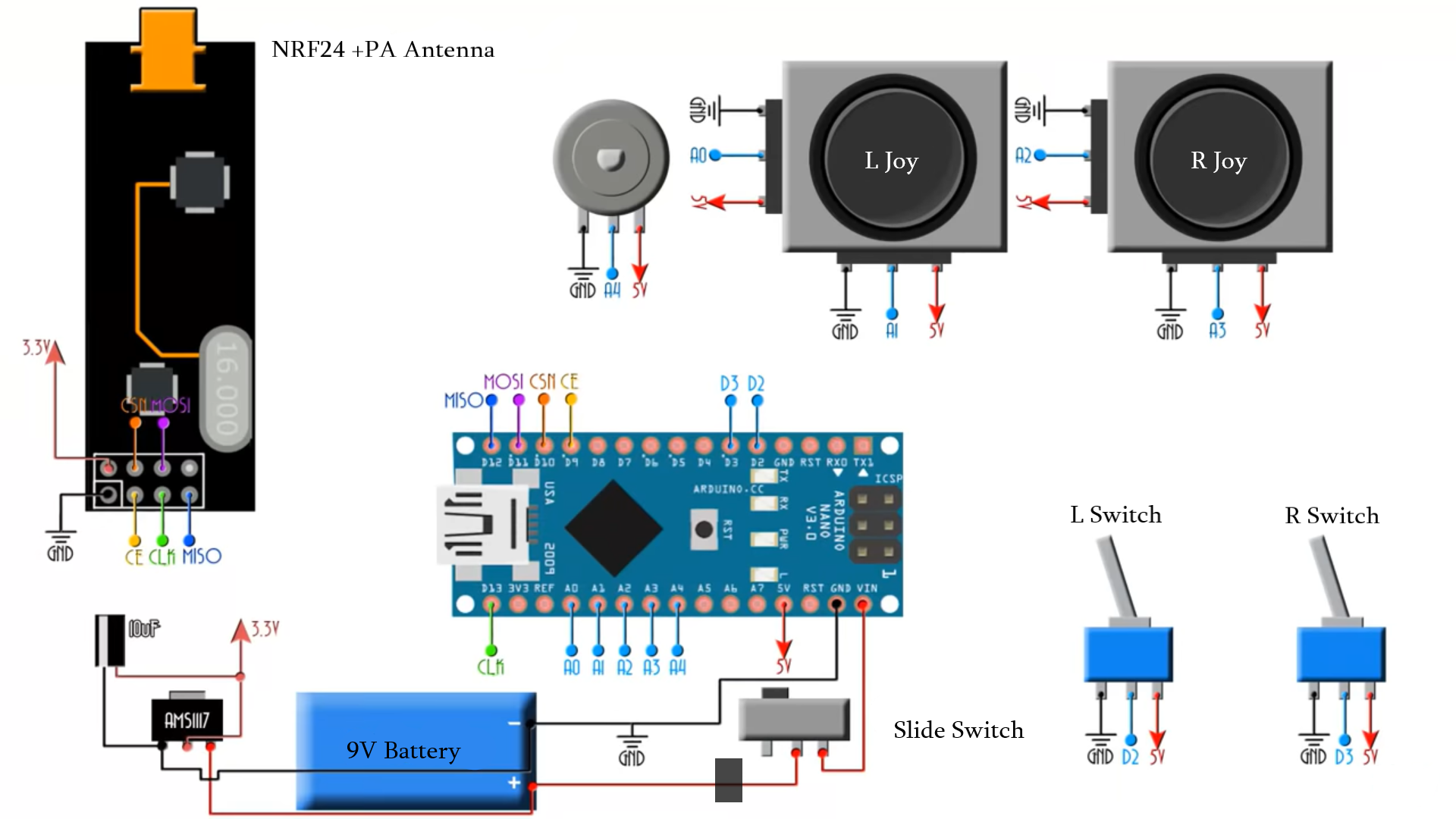
Transmitter Circuit
Transmitter Circuit
Receiver Circuit
Receiver Circuit
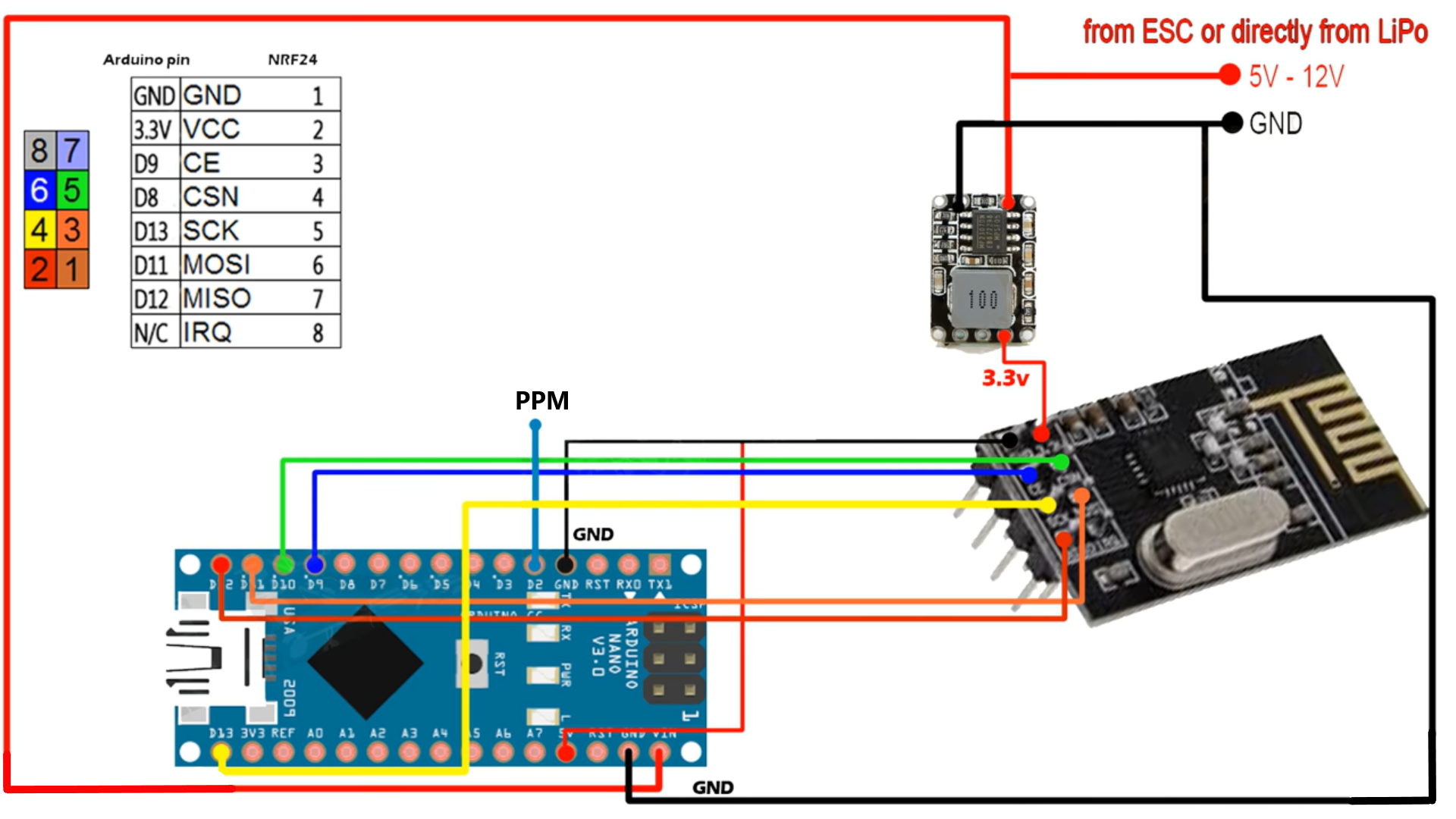
Receiver Circuit
Receiver Circuit
Flight Controller Circuit
Flight Controller Circuit
Comments
Only logged in users can leave comments