'Mikey Myers Halloween' Arduino project
Stay back! Don't let Mikey stab!
Components and supplies
1
Arduino Nano
1
Ultrasonic Sensor - HC-SR04 (Generic)
1
Jumper wires (generic)
1
Breadboard (generic)
1
SG90 Micro-servo motor
Project description
Code
Code:
arduino
Repository link:
Downloadable files
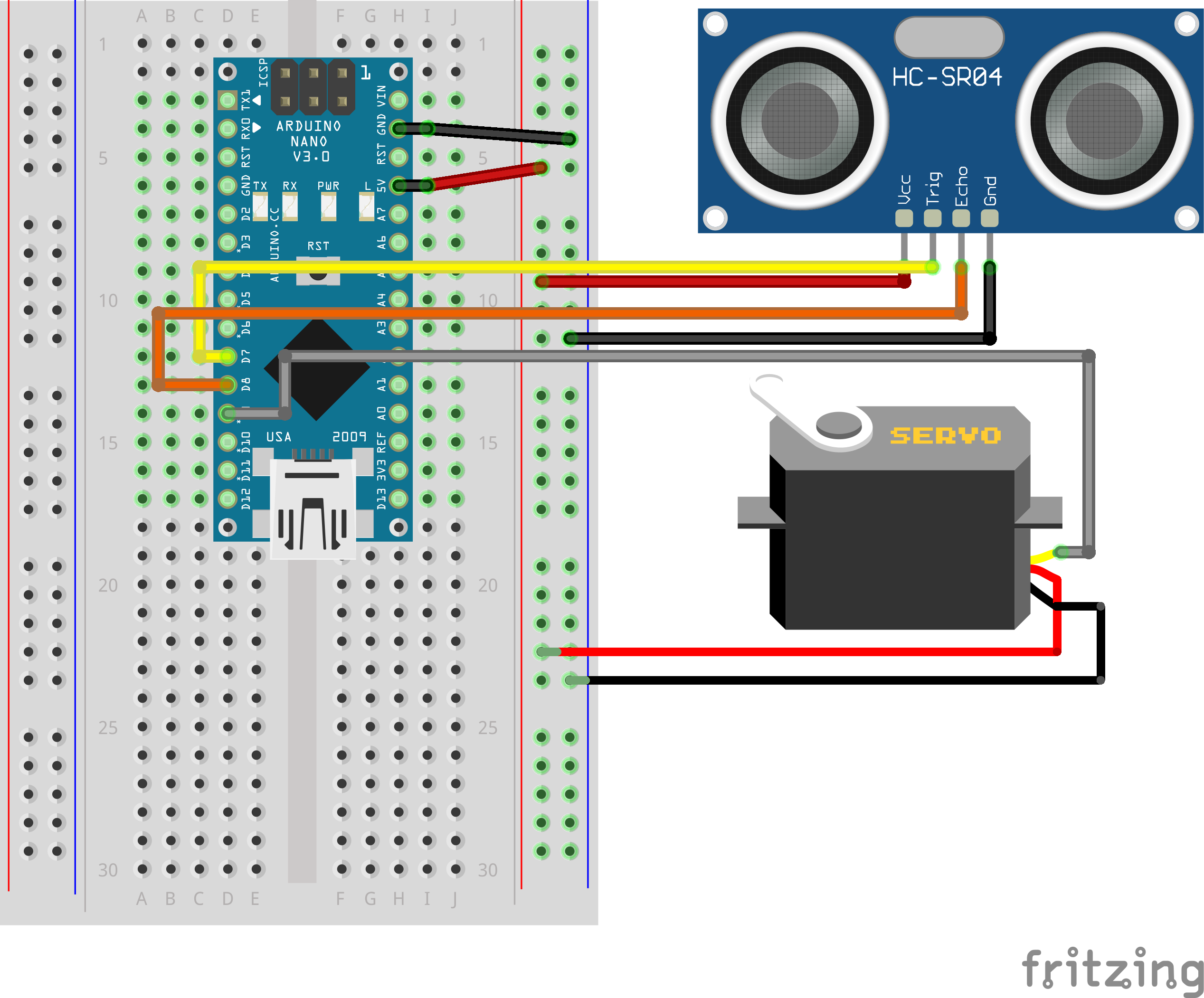
Circuit:
Circuit:
Schematic:
Schematic:

Comments
Only logged in users can leave comments