ESP32-CAM with PIR motion sensor PLUS Telegram?
Receive motion detected images to your Telegram app!
Components and supplies
1
Breadboard (generic)
1
Jumper wires (generic)
1
Resistor 220 ohm
1
ESP32 Camera Module Development Board
1
HC-SR501 PIR sensor
1
Arduino UNO
1
5 mm LED: Green
Apps and platforms
1
Arduino IDE
Project description
Code
Code:
arduino
1/* ESP32-CAM PIR motion sensor to Telegram alert 2 3 Using the below mentioned project as the base template, 4 I wanted to create a network camera that is capable of 5 capturing movement and be able to access it easily 6 through an app. The idea was to use it to notify me if 7 the delivery person is at my door (as sometimes there's no one at home). 8 9 Luckily I stumbled upon Rui Santos's amazing website, 10 and it did make it easier for me since he has already done 11 such a project. 12 13 You can follow his step by step tutorial on how to 14 install the intended libraries to run this project too! 15 16 Components: 17 - Arduino Uno 18 - ESP32-CAM 19 - HC-SR501 PIR sensor 20 - Green LED 21 - 220Ohm resistor 22 - Helping-Hands tool with alligator clips 23 - Breadboard 24 - Some jumper wires 25 26/////////////////////////////////////////////////////////////////////////////////////////////////// 27 Rui Santos 28 Complete project details at https://RandomNerdTutorials.com/telegram-esp32-cam-photo-arduino/ 29 30 Permission is hereby granted, free of charge, to any person obtaining a copy 31 of this software and associated documentation files. 32 33 The above copyright notice and this permission notice shall be included in all 34 copies or substantial portions of the Software. 35*/ 36 37#include <Arduino.h> 38#include <WiFi.h> 39#include <WiFiClientSecure.h> 40#include "soc/soc.h" 41#include "soc/rtc_cntl_reg.h" 42#include "esp_camera.h" 43#include <UniversalTelegramBot.h> 44#include <ArduinoJson.h> 45 46const char* ssid = "ENTER YOUR WIFI NETWORK"; 47const char* password = "*************"; 48 49// Initialize Telegram BOT 50String BOTtoken = "**********:***********************************"; // your Bot Token (Get from Botfather) 51 52// Use @myidbot to find out the chat ID of an individual or a group 53// Also note that you need to click "start" on a bot before it can 54// message you 55String CHAT_ID = "**********"; 56 57bool sendPhoto = false; 58 59WiFiClientSecure clientTCP; 60UniversalTelegramBot bot(BOTtoken, clientTCP); 61 62#define FLASH_LED_PIN 4 63bool flashState = LOW; 64 65//Checks for new messages every 1 second. 66int botRequestDelay = 1000; 67unsigned long lastTimeBotRan; 68 69const int PIRsensor = 13; 70const int led = 12; 71int PIRstate = LOW; // we start, assuming no motion detected 72int val = 0; 73 74// the time we give the sensor to calibrate (approx. 10-60 secs according to datatsheet) 75const int calibrationTime = 30; // 30 secs 76 77//CAMERA_MODEL_AI_THINKER 78#define PWDN_GPIO_NUM 32 79#define RESET_GPIO_NUM -1 80#define XCLK_GPIO_NUM 0 81#define SIOD_GPIO_NUM 26 82#define SIOC_GPIO_NUM 27 83 84#define Y9_GPIO_NUM 35 85#define Y8_GPIO_NUM 34 86#define Y7_GPIO_NUM 39 87#define Y6_GPIO_NUM 36 88#define Y5_GPIO_NUM 21 89#define Y4_GPIO_NUM 19 90#define Y3_GPIO_NUM 18 91#define Y2_GPIO_NUM 5 92#define VSYNC_GPIO_NUM 25 93#define HREF_GPIO_NUM 23 94#define PCLK_GPIO_NUM 22 95 96 97void configInitCamera() { 98 camera_config_t config; 99 config.ledc_channel = LEDC_CHANNEL_0; 100 config.ledc_timer = LEDC_TIMER_0; 101 config.pin_d0 = Y2_GPIO_NUM; 102 config.pin_d1 = Y3_GPIO_NUM; 103 config.pin_d2 = Y4_GPIO_NUM; 104 config.pin_d3 = Y5_GPIO_NUM; 105 config.pin_d4 = Y6_GPIO_NUM; 106 config.pin_d5 = Y7_GPIO_NUM; 107 config.pin_d6 = Y8_GPIO_NUM; 108 config.pin_d7 = Y9_GPIO_NUM; 109 config.pin_xclk = XCLK_GPIO_NUM; 110 config.pin_pclk = PCLK_GPIO_NUM; 111 config.pin_vsync = VSYNC_GPIO_NUM; 112 config.pin_href = HREF_GPIO_NUM; 113 config.pin_sscb_sda = SIOD_GPIO_NUM; 114 config.pin_sscb_scl = SIOC_GPIO_NUM; 115 config.pin_pwdn = PWDN_GPIO_NUM; 116 config.pin_reset = RESET_GPIO_NUM; 117 config.xclk_freq_hz = 20000000; 118 config.pixel_format = PIXFORMAT_JPEG; 119 120 //init with high specs to pre-allocate larger buffers 121 if (psramFound()) { 122 config.frame_size = FRAMESIZE_UXGA; 123 config.jpeg_quality = 10; //0-63 lower number means higher quality 124 config.fb_count = 2; 125 } else { 126 config.frame_size = FRAMESIZE_SVGA; 127 config.jpeg_quality = 12; //0-63 lower number means higher quality 128 config.fb_count = 1; 129 } 130 131 // camera init 132 esp_err_t err = esp_camera_init(&config); 133 if (err != ESP_OK) { 134 Serial.printf("Camera init failed with error 0x%x", err); 135 delay(1000); 136 ESP.restart(); 137 } 138 139 // Drop down frame size for higher initial frame rate 140 sensor_t * s = esp_camera_sensor_get(); 141 s->set_framesize(s, FRAMESIZE_CIF); // UXGA|SXGA|XGA|SVGA|VGA|CIF|QVGA|HQVGA|QQVGA 142} 143 144void handleNewMessages(int numNewMessages) { 145 Serial.print("Handle New Messages: "); 146 Serial.println(numNewMessages); 147 148 for (int i = 0; i < numNewMessages; i++) { 149 String chat_id = String(bot.messages[i].chat_id); 150 if (chat_id != CHAT_ID) { 151 bot.sendMessage(chat_id, "Unauthorized user", ""); 152 continue; 153 } 154 155 // Print the received message 156 String text = bot.messages[i].text; 157 Serial.println(text); 158 159 String from_name = bot.messages[i].from_name; 160 if (text == "/start") { 161 String welcome = "Welcome , " + from_name + "\ 162"; 163 welcome += "Use the following commands to interact with the ESP32-CAM \ 164"; 165 welcome += "/photo : takes a new photo\ 166"; 167 welcome += "/flash : toggles flash LED \ 168"; 169 bot.sendMessage(CHAT_ID, welcome, ""); 170 } 171 if (text == "/flash") { 172 flashState = !flashState; 173 digitalWrite(FLASH_LED_PIN, flashState); 174 Serial.println("Change flash LED state"); 175 } 176 if (text == "/photo") { 177 sendPhoto = true; 178 Serial.println("New photo request"); 179 } 180 } 181} 182 183String sendPhotoTelegram() { 184 const char* myDomain = "api.telegram.org"; 185 String getAll = ""; 186 String getBody = ""; 187 188 camera_fb_t * fb = NULL; 189 fb = esp_camera_fb_get(); 190 if (!fb) { 191 Serial.println("Camera capture failed"); 192 delay(1000); 193 ESP.restart(); 194 return "Camera capture failed"; 195 } 196 197 Serial.println("Connect to " + String(myDomain)); 198 199 200 if (clientTCP.connect(myDomain, 443)) { 201 Serial.println("Connection successful"); 202 203 String head = "--c010blind3ngineer\ \ 204Content-Disposition: form-data; name=\\"chat_id\\"; \ \ 205\ \ 206" + CHAT_ID + "\ \ 207--c010blind3ngineer\ \ 208Content-Disposition: form-data; name=\\"photo\\"; filename=\\"esp32-cam.jpg\\"\ \ 209Content-Type: image/jpeg\ \ 210\ \ 211"; 212 String tail = "\ \ 213--c010blind3ngineer--\ \ 214"; 215 216 uint16_t imageLen = fb->len; 217 uint16_t extraLen = head.length() + tail.length(); 218 uint16_t totalLen = imageLen + extraLen; 219 220 clientTCP.println("POST /bot" + BOTtoken + "/sendPhoto HTTP/1.1"); 221 clientTCP.println("Host: " + String(myDomain)); 222 clientTCP.println("Content-Length: " + String(totalLen)); 223 clientTCP.println("Content-Type: multipart/form-data; boundary=c010blind3ngineer"); 224 clientTCP.println(); 225 clientTCP.print(head); 226 227 uint8_t *fbBuf = fb->buf; 228 size_t fbLen = fb->len; 229 for (size_t n = 0; n < fbLen; n = n + 1024) { 230 if (n + 1024 < fbLen) { 231 clientTCP.write(fbBuf, 1024); 232 fbBuf += 1024; 233 } 234 else if (fbLen % 1024 > 0) { 235 size_t remainder = fbLen % 1024; 236 clientTCP.write(fbBuf, remainder); 237 } 238 } 239 240 clientTCP.print(tail); 241 242 esp_camera_fb_return(fb); 243 244 int waitTime = 10000; // timeout 10 seconds 245 long startTimer = millis(); 246 boolean state = false; 247 248 while ((startTimer + waitTime) > millis()) { 249 Serial.print("."); 250 delay(100); 251 while (clientTCP.available()) { 252 char c = clientTCP.read(); 253 if (state == true) getBody += String(c); 254 if (c == '\ 255') { 256 if (getAll.length() == 0) state = true; 257 getAll = ""; 258 } 259 else if (c != '\ ') 260 getAll += String(c); 261 startTimer = millis(); 262 } 263 if (getBody.length() > 0) break; 264 } 265 clientTCP.stop(); 266 Serial.println(getBody); 267 } 268 else { 269 getBody = "Connected to api.telegram.org failed."; 270 Serial.println("Connected to api.telegram.org failed."); 271 } 272 return getBody; 273} 274 275void setup() { 276 WRITE_PERI_REG(RTC_CNTL_BROWN_OUT_REG, 0); 277 // Init Serial Monitor 278 Serial.begin(115200); 279 280 // Set LED Flash as output 281 pinMode(FLASH_LED_PIN, OUTPUT); 282 digitalWrite(FLASH_LED_PIN, flashState); 283 284 // Set PIR sensor as input and LED as output 285 pinMode(PIRsensor, INPUT); 286 pinMode(led, OUTPUT); 287 288 // Give some time for the PIR sensor to warm up 289 Serial.println("Waiting for the sensor to warm up on first boot"); 290 delay(calibrationTime * 1000); // Time converted back to miliseconds 291 292 // Blink LED 3 times to indicate PIR sensor warmed up 293 digitalWrite(led, HIGH); 294 delay(500); 295 digitalWrite(led, LOW); 296 delay(500); 297 digitalWrite(led, HIGH); 298 delay(500); 299 digitalWrite(led, LOW); 300 delay(500); 301 digitalWrite(led, HIGH); 302 delay(500); 303 digitalWrite(led, LOW); 304 Serial.println("PIR sensor is ACTIVE"); 305 306 // Config and init the camera 307 configInitCamera(); 308 309 // Connect to Wi-Fi 310 WiFi.mode(WIFI_STA); 311 Serial.println(); 312 Serial.print("Connecting to "); 313 Serial.println(ssid); 314 WiFi.begin(ssid, password); 315 clientTCP.setCACert(TELEGRAM_CERTIFICATE_ROOT); // Add root certificate for api.telegram.org 316 while (WiFi.status() != WL_CONNECTED) { 317 Serial.print("."); 318 delay(500); 319 } 320 Serial.println(); 321 Serial.print("ESP32-CAM IP Address: "); 322 Serial.println(WiFi.localIP()); 323} 324 325void loop() { 326 val = digitalRead(PIRsensor); 327 328 if (val == HIGH) { 329 digitalWrite(led, HIGH); 330 if (PIRstate == LOW) { 331 // we have just turned on because movement is detected 332 Serial.println("Motion detected!"); 333 delay(500); 334 Serial.println("Sending photo to Telegram"); 335 sendPhotoTelegram(); 336 PIRstate = HIGH; 337 } 338 } 339 else if (sendPhoto) { 340 Serial.println("Preparing photo"); 341 digitalWrite(FLASH_LED_PIN, HIGH); 342 Serial.println("Flash state set to HIGH"); 343 delay(500); 344 sendPhotoTelegram(); 345 sendPhoto = false; 346 digitalWrite(FLASH_LED_PIN, LOW); 347 Serial.println("Flash state set to LOW"); 348 } 349 else if (millis() > lastTimeBotRan + botRequestDelay) { 350 int numNewMessages = bot.getUpdates(bot.last_message_received + 1); 351 while (numNewMessages) { 352 Serial.println("got response"); 353 handleNewMessages(numNewMessages); 354 numNewMessages = bot.getUpdates(bot.last_message_received + 1); 355 } 356 lastTimeBotRan = millis(); 357 } 358 else { 359 digitalWrite(led, LOW); 360 if (PIRstate == HIGH) { 361 Serial.println("Motion ended!"); 362 PIRstate = LOW; 363 } 364 } 365} 366
Repository link:
Code:
arduino
1/* ESP32-CAM PIR motion sensor to Telegram alert 2 3 Using the below mentioned project as the base template, 4 I wanted to create a network camera that is capable of 5 capturing movement and be able to access it easily 6 through an app. The idea was to use it to notify me if 7 the delivery person is at my door (as sometimes there's no one at home). 8 9 Luckily I stumbled upon Rui Santos's amazing website, 10 and it did make it easier for me since he has already done 11 such a project. 12 13 You can follow his step by step tutorial on how to 14 install the intended libraries to run this project too! 15 16 Components: 17 - Arduino Uno 18 - ESP32-CAM 19 - HC-SR501 PIR sensor 20 - Green LED 21 - 220Ohm resistor 22 - Helping-Hands tool with alligator clips 23 - Breadboard 24 - Some jumper wires 25 26/////////////////////////////////////////////////////////////////////////////////////////////////// 27 Rui Santos 28 Complete project details at https://RandomNerdTutorials.com/telegram-esp32-cam-photo-arduino/ 29 30 Permission is hereby granted, free of charge, to any person obtaining a copy 31 of this software and associated documentation files. 32 33 The above copyright notice and this permission notice shall be included in all 34 copies or substantial portions of the Software. 35*/ 36 37#include <Arduino.h> 38#include <WiFi.h> 39#include <WiFiClientSecure.h> 40#include "soc/soc.h" 41#include "soc/rtc_cntl_reg.h" 42#include "esp_camera.h" 43#include <UniversalTelegramBot.h> 44#include <ArduinoJson.h> 45 46const char* ssid = "ENTER YOUR WIFI NETWORK"; 47const char* password = "*************"; 48 49// Initialize Telegram BOT 50String BOTtoken = "**********:***********************************"; // your Bot Token (Get from Botfather) 51 52// Use @myidbot to find out the chat ID of an individual or a group 53// Also note that you need to click "start" on a bot before it can 54// message you 55String CHAT_ID = "**********"; 56 57bool sendPhoto = false; 58 59WiFiClientSecure clientTCP; 60UniversalTelegramBot bot(BOTtoken, clientTCP); 61 62#define FLASH_LED_PIN 4 63bool flashState = LOW; 64 65//Checks for new messages every 1 second. 66int botRequestDelay = 1000; 67unsigned long lastTimeBotRan; 68 69const int PIRsensor = 13; 70const int led = 12; 71int PIRstate = LOW; // we start, assuming no motion detected 72int val = 0; 73 74// the time we give the sensor to calibrate (approx. 10-60 secs according to datatsheet) 75const int calibrationTime = 30; // 30 secs 76 77//CAMERA_MODEL_AI_THINKER 78#define PWDN_GPIO_NUM 32 79#define RESET_GPIO_NUM -1 80#define XCLK_GPIO_NUM 0 81#define SIOD_GPIO_NUM 26 82#define SIOC_GPIO_NUM 27 83 84#define Y9_GPIO_NUM 35 85#define Y8_GPIO_NUM 34 86#define Y7_GPIO_NUM 39 87#define Y6_GPIO_NUM 36 88#define Y5_GPIO_NUM 21 89#define Y4_GPIO_NUM 19 90#define Y3_GPIO_NUM 18 91#define Y2_GPIO_NUM 5 92#define VSYNC_GPIO_NUM 25 93#define HREF_GPIO_NUM 23 94#define PCLK_GPIO_NUM 22 95 96 97void configInitCamera() { 98 camera_config_t config; 99 config.ledc_channel = LEDC_CHANNEL_0; 100 config.ledc_timer = LEDC_TIMER_0; 101 config.pin_d0 = Y2_GPIO_NUM; 102 config.pin_d1 = Y3_GPIO_NUM; 103 config.pin_d2 = Y4_GPIO_NUM; 104 config.pin_d3 = Y5_GPIO_NUM; 105 config.pin_d4 = Y6_GPIO_NUM; 106 config.pin_d5 = Y7_GPIO_NUM; 107 config.pin_d6 = Y8_GPIO_NUM; 108 config.pin_d7 = Y9_GPIO_NUM; 109 config.pin_xclk = XCLK_GPIO_NUM; 110 config.pin_pclk = PCLK_GPIO_NUM; 111 config.pin_vsync = VSYNC_GPIO_NUM; 112 config.pin_href = HREF_GPIO_NUM; 113 config.pin_sscb_sda = SIOD_GPIO_NUM; 114 config.pin_sscb_scl = SIOC_GPIO_NUM; 115 config.pin_pwdn = PWDN_GPIO_NUM; 116 config.pin_reset = RESET_GPIO_NUM; 117 config.xclk_freq_hz = 20000000; 118 config.pixel_format = PIXFORMAT_JPEG; 119 120 //init with high specs to pre-allocate larger buffers 121 if (psramFound()) { 122 config.frame_size = FRAMESIZE_UXGA; 123 config.jpeg_quality = 10; //0-63 lower number means higher quality 124 config.fb_count = 2; 125 } else { 126 config.frame_size = FRAMESIZE_SVGA; 127 config.jpeg_quality = 12; //0-63 lower number means higher quality 128 config.fb_count = 1; 129 } 130 131 // camera init 132 esp_err_t err = esp_camera_init(&config); 133 if (err != ESP_OK) { 134 Serial.printf("Camera init failed with error 0x%x", err); 135 delay(1000); 136 ESP.restart(); 137 } 138 139 // Drop down frame size for higher initial frame rate 140 sensor_t * s = esp_camera_sensor_get(); 141 s->set_framesize(s, FRAMESIZE_CIF); // UXGA|SXGA|XGA|SVGA|VGA|CIF|QVGA|HQVGA|QQVGA 142} 143 144void handleNewMessages(int numNewMessages) { 145 Serial.print("Handle New Messages: "); 146 Serial.println(numNewMessages); 147 148 for (int i = 0; i < numNewMessages; i++) { 149 String chat_id = String(bot.messages[i].chat_id); 150 if (chat_id != CHAT_ID) { 151 bot.sendMessage(chat_id, "Unauthorized user", ""); 152 continue; 153 } 154 155 // Print the received message 156 String text = bot.messages[i].text; 157 Serial.println(text); 158 159 String from_name = bot.messages[i].from_name; 160 if (text == "/start") { 161 String welcome = "Welcome , " + from_name + "\ 162"; 163 welcome += "Use the following commands to interact with the ESP32-CAM \ 164"; 165 welcome += "/photo : takes a new photo\ 166"; 167 welcome += "/flash : toggles flash LED \ 168"; 169 bot.sendMessage(CHAT_ID, welcome, ""); 170 } 171 if (text == "/flash") { 172 flashState = !flashState; 173 digitalWrite(FLASH_LED_PIN, flashState); 174 Serial.println("Change flash LED state"); 175 } 176 if (text == "/photo") { 177 sendPhoto = true; 178 Serial.println("New photo request"); 179 } 180 } 181} 182 183String sendPhotoTelegram() { 184 const char* myDomain = "api.telegram.org"; 185 String getAll = ""; 186 String getBody = ""; 187 188 camera_fb_t * fb = NULL; 189 fb = esp_camera_fb_get(); 190 if (!fb) { 191 Serial.println("Camera capture failed"); 192 delay(1000); 193 ESP.restart(); 194 return "Camera capture failed"; 195 } 196 197 Serial.println("Connect to " + String(myDomain)); 198 199 200 if (clientTCP.connect(myDomain, 443)) { 201 Serial.println("Connection successful"); 202 203 String head = "--c010blind3ngineer\ \ 204Content-Disposition: form-data; name=\\"chat_id\\"; \ \ 205\ \ 206" + CHAT_ID + "\ \ 207--c010blind3ngineer\ \ 208Content-Disposition: form-data; name=\\"photo\\"; filename=\\"esp32-cam.jpg\\"\ \ 209Content-Type: image/jpeg\ \ 210\ \ 211"; 212 String tail = "\ \ 213--c010blind3ngineer--\ \ 214"; 215 216 uint16_t imageLen = fb->len; 217 uint16_t extraLen = head.length() + tail.length(); 218 uint16_t totalLen = imageLen + extraLen; 219 220 clientTCP.println("POST /bot" + BOTtoken + "/sendPhoto HTTP/1.1"); 221 clientTCP.println("Host: " + String(myDomain)); 222 clientTCP.println("Content-Length: " + String(totalLen)); 223 clientTCP.println("Content-Type: multipart/form-data; boundary=c010blind3ngineer"); 224 clientTCP.println(); 225 clientTCP.print(head); 226 227 uint8_t *fbBuf = fb->buf; 228 size_t fbLen = fb->len; 229 for (size_t n = 0; n < fbLen; n = n + 1024) { 230 if (n + 1024 < fbLen) { 231 clientTCP.write(fbBuf, 1024); 232 fbBuf += 1024; 233 } 234 else if (fbLen % 1024 > 0) { 235 size_t remainder = fbLen % 1024; 236 clientTCP.write(fbBuf, remainder); 237 } 238 } 239 240 clientTCP.print(tail); 241 242 esp_camera_fb_return(fb); 243 244 int waitTime = 10000; // timeout 10 seconds 245 long startTimer = millis(); 246 boolean state = false; 247 248 while ((startTimer + waitTime) > millis()) { 249 Serial.print("."); 250 delay(100); 251 while (clientTCP.available()) { 252 char c = clientTCP.read(); 253 if (state == true) getBody += String(c); 254 if (c == '\n') { 255 if (getAll.length() == 0) state = true; 256 getAll = ""; 257 } 258 else if (c != '\r') 259 getAll += String(c); 260 startTimer = millis(); 261 } 262 if (getBody.length() > 0) break; 263 } 264 clientTCP.stop(); 265 Serial.println(getBody); 266 } 267 else { 268 getBody = "Connected to api.telegram.org failed."; 269 Serial.println("Connected to api.telegram.org failed."); 270 } 271 return getBody; 272} 273 274void setup() { 275 WRITE_PERI_REG(RTC_CNTL_BROWN_OUT_REG, 0); 276 // Init Serial Monitor 277 Serial.begin(115200); 278 279 // Set LED Flash as output 280 pinMode(FLASH_LED_PIN, OUTPUT); 281 digitalWrite(FLASH_LED_PIN, flashState); 282 283 // Set PIR sensor as input and LED as output 284 pinMode(PIRsensor, INPUT); 285 pinMode(led, OUTPUT); 286 287 // Give some time for the PIR sensor to warm up 288 Serial.println("Waiting for the sensor to warm up on first boot"); 289 delay(calibrationTime * 1000); // Time converted back to miliseconds 290 291 // Blink LED 3 times to indicate PIR sensor warmed up 292 digitalWrite(led, HIGH); 293 delay(500); 294 digitalWrite(led, LOW); 295 delay(500); 296 digitalWrite(led, HIGH); 297 delay(500); 298 digitalWrite(led, LOW); 299 delay(500); 300 digitalWrite(led, HIGH); 301 delay(500); 302 digitalWrite(led, LOW); 303 Serial.println("PIR sensor is ACTIVE"); 304 305 // Config and init the camera 306 configInitCamera(); 307 308 // Connect to Wi-Fi 309 WiFi.mode(WIFI_STA); 310 Serial.println(); 311 Serial.print("Connecting to "); 312 Serial.println(ssid); 313 WiFi.begin(ssid, password); 314 clientTCP.setCACert(TELEGRAM_CERTIFICATE_ROOT); // Add root certificate for api.telegram.org 315 while (WiFi.status() != WL_CONNECTED) { 316 Serial.print("."); 317 delay(500); 318 } 319 Serial.println(); 320 Serial.print("ESP32-CAM IP Address: "); 321 Serial.println(WiFi.localIP()); 322} 323 324void loop() { 325 val = digitalRead(PIRsensor); 326 327 if (val == HIGH) { 328 digitalWrite(led, HIGH); 329 if (PIRstate == LOW) { 330 // we have just turned on because movement is detected 331 Serial.println("Motion detected!"); 332 delay(500); 333 Serial.println("Sending photo to Telegram"); 334 sendPhotoTelegram(); 335 PIRstate = HIGH; 336 } 337 } 338 else if (sendPhoto) { 339 Serial.println("Preparing photo"); 340 digitalWrite(FLASH_LED_PIN, HIGH); 341 Serial.println("Flash state set to HIGH"); 342 delay(500); 343 sendPhotoTelegram(); 344 sendPhoto = false; 345 digitalWrite(FLASH_LED_PIN, LOW); 346 Serial.println("Flash state set to LOW"); 347 } 348 else if (millis() > lastTimeBotRan + botRequestDelay) { 349 int numNewMessages = bot.getUpdates(bot.last_message_received + 1); 350 while (numNewMessages) { 351 Serial.println("got response"); 352 handleNewMessages(numNewMessages); 353 numNewMessages = bot.getUpdates(bot.last_message_received + 1); 354 } 355 lastTimeBotRan = millis(); 356 } 357 else { 358 digitalWrite(led, LOW); 359 if (PIRstate == HIGH) { 360 Serial.println("Motion ended!"); 361 PIRstate = LOW; 362 } 363 } 364} 365
Repository link:
Downloadable files
Schematic:
Schematic:
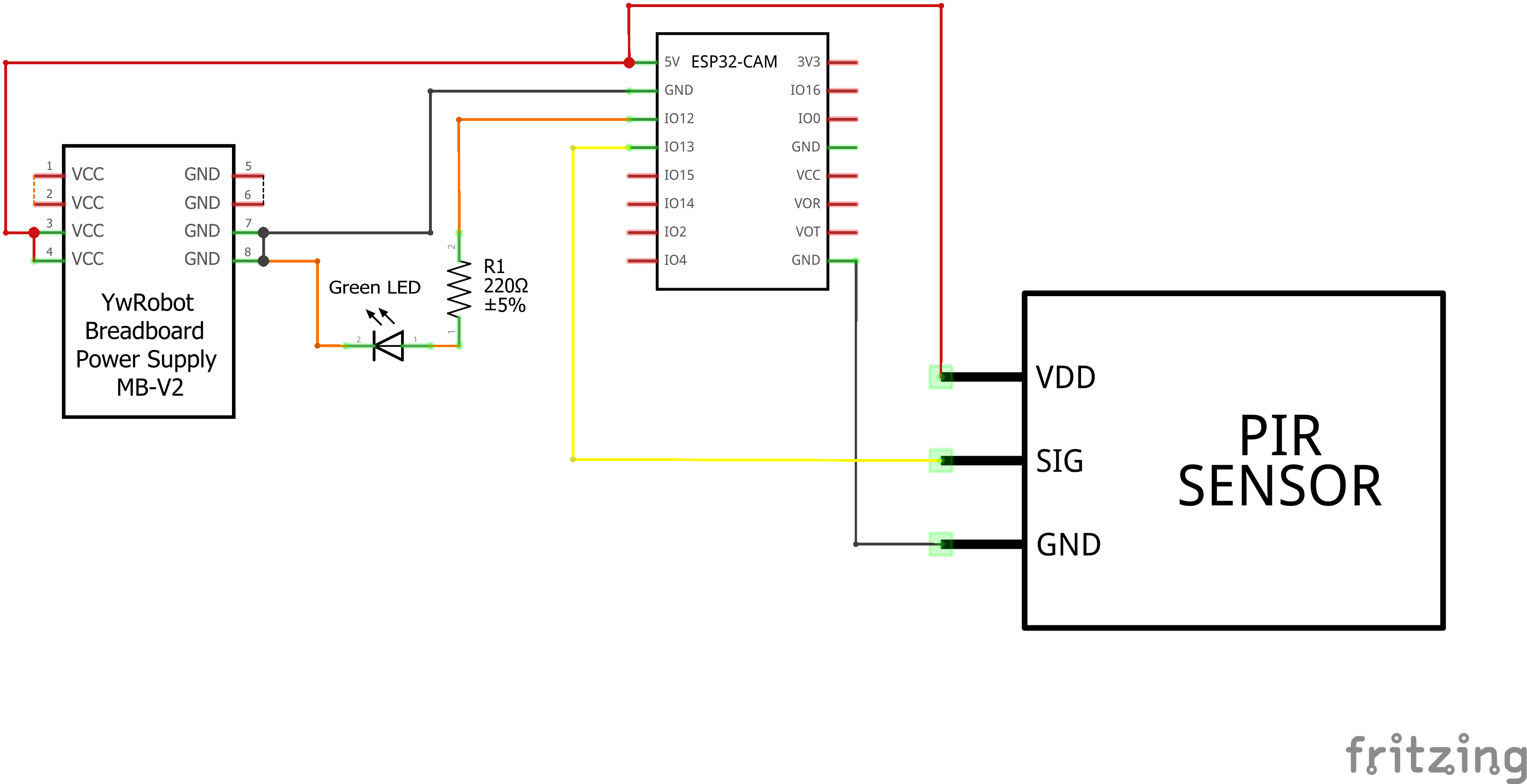
Schematic:
Schematic:
Circuit:
Circuit:

Comments
Only logged in users can leave comments