Arduino IoT Train
An IoT controlled LEGO Tram that can move forward and backwards, and also has individually controllable LED channels.
Components and supplies
LED (generic)
Solderless Breadboard Half Size
9V Battery Clip
Resistor 1k ohm
Arduino Nano 33 IoT
DC Motor, Miniature
9V battery (generic)
Dual H-Bridge motor drivers L293D
Jumper wires (generic)
Apps and platforms
Arduino Web Editor
Arduino IoT Cloud
Project description
Code
Code
arduino
This is the Code that needs to be uploaded to the Nano 33 IoT for the train to function. You can modify it if you want to add anything extra, but you will need to change the controlled things inside the Arduino IoT Cloud
Downloadable files
Schematic
Circuit Diagram using Altium CircuitMaker (since I don't have fritzing)
Schematic
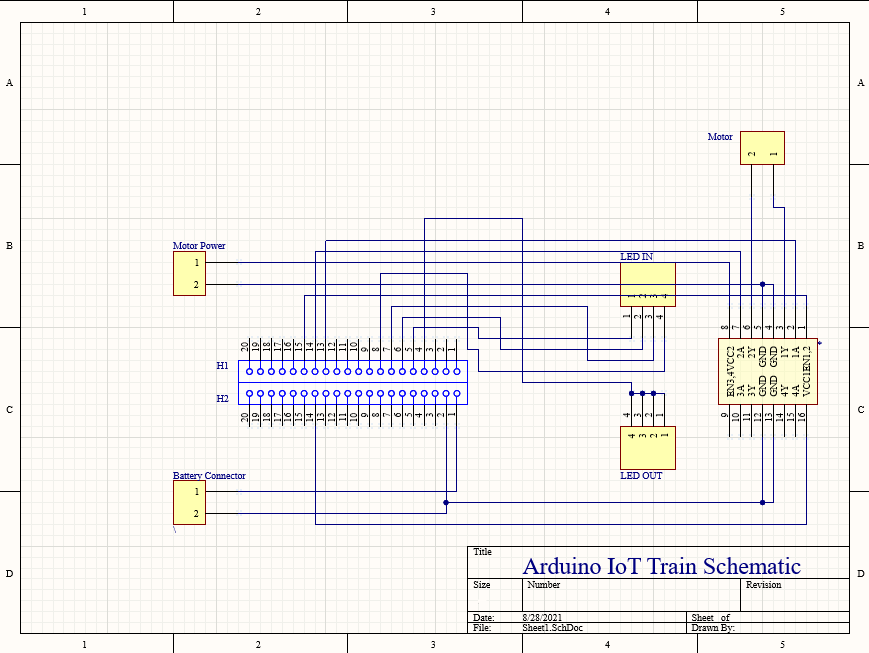
Schematic
Circuit Diagram using Altium CircuitMaker (since I don't have fritzing)
Schematic
Comments
Only logged in users can leave comments