Devices & Components
1
Arduino Nano
1
Arduino Uno Rev3
1
USB-A to Micro-USB Cable
1
Funduino Joystick Shield V1.A
1
Laser diode module
1
USB-A to B Cable
15
Male/Female Jumper Wires
2
nRF24 Module (Generic)
4
4.2v 18650 Batteries
2
SG90 Micro-servo motor
6
Jumper wires (generic)
4
DC Motor, 12 V
1
Plastic wheel for motor
2
Battery Holder, 18650 x 2
Hardware & Tools
1
Breadboard, 170 Pin
Software & Tools
Arduino IDE
Project description
Code
Transmitter code
c_cpp
Transmitter code for the project
Receiver Code
c_cpp
Receiver code for the project
Downloadable files
Transmitter circuit
Connections of joystick shield on Arduino. Battery connection.
Transmitter circuit

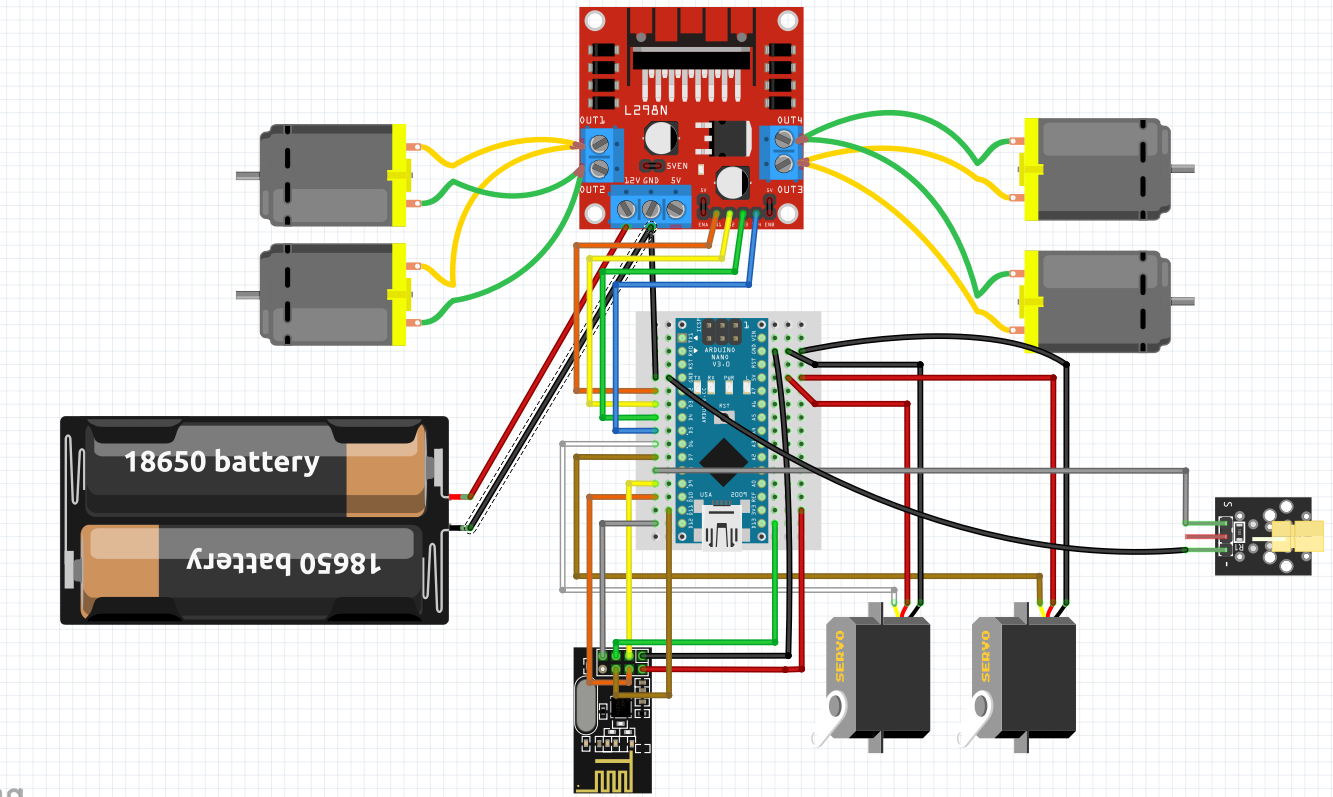
Receiver Circuit
Circuit of the RC car.
Receiver Circuit
Comments
Only logged in users can leave comments