Devices & Components
1
Arduino Uno Rev3
2
DC motors with Wheels
1
L298N Motor Drive
1
HC-SR04 Ultrasonic Sensor
1
9V Battery Clip Connector
1
Universal Wheel
1
SG90 Micro Servo Motor
2
9V Batteries
1
Mini breadboard
1
9V Battery Clip to Arduino Connector
1
F to F Jumpers and M to M Jumpers
Project description
Code
NT1_ArduinoCode
arduino
Downloadable files
NT1_BED_STL
NT1_BED_STL
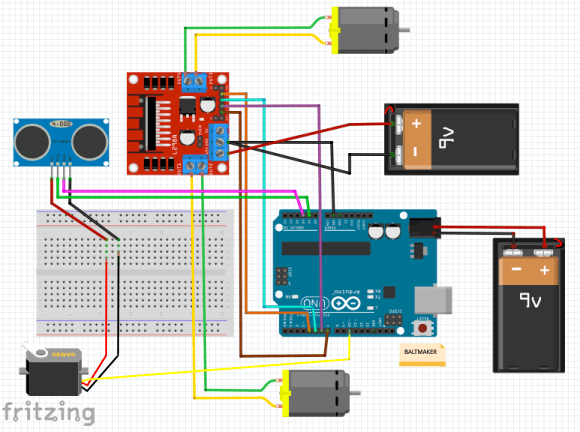
Fritzing Diagram
Fritzing Diagram
NT1_BED_STL
NT1_BED_STL
Fritzing Diagram
Fritzing Diagram
Comments
Only logged in users can leave comments