Arduino Nano 33 IoT Remote Debugging + Coding
Working through a problem, but only you have the hardware? Want to work with someone remotely as if they were there? This is for you...
Devices & Components
Arduino Nano 33 IoT
STLinkv2 Hardware Debugger
Jumper wires (generic)
Software & Tools
Arduino IDE
Visual Studio 2017
Visual Micro
Project description
Code
Calcs.ino
arduino
Additional Code to be used in Debugging Sketch Example
Calcs.ino
arduino
Additional Code to be used in Debugging Sketch Example
NanoDebugExample.ino
arduino
Basic Sketch to use with debugging, use with other Ino file to use the same code as shown in the example.
Downloadable files
Example Nano33 IoT Connection Diagram
How to Connect the Nano-33 IoT to a Hardware Debugger
Example Nano33 IoT Connection Diagram
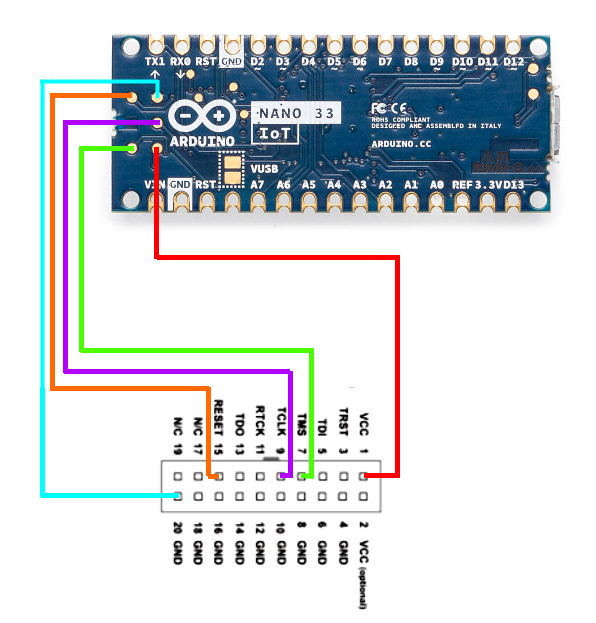
Example Nano33 IoT Connection Diagram
How to Connect the Nano-33 IoT to a Hardware Debugger
Example Nano33 IoT Connection Diagram
Comments
Only logged in users can leave comments