Devices & Components
2
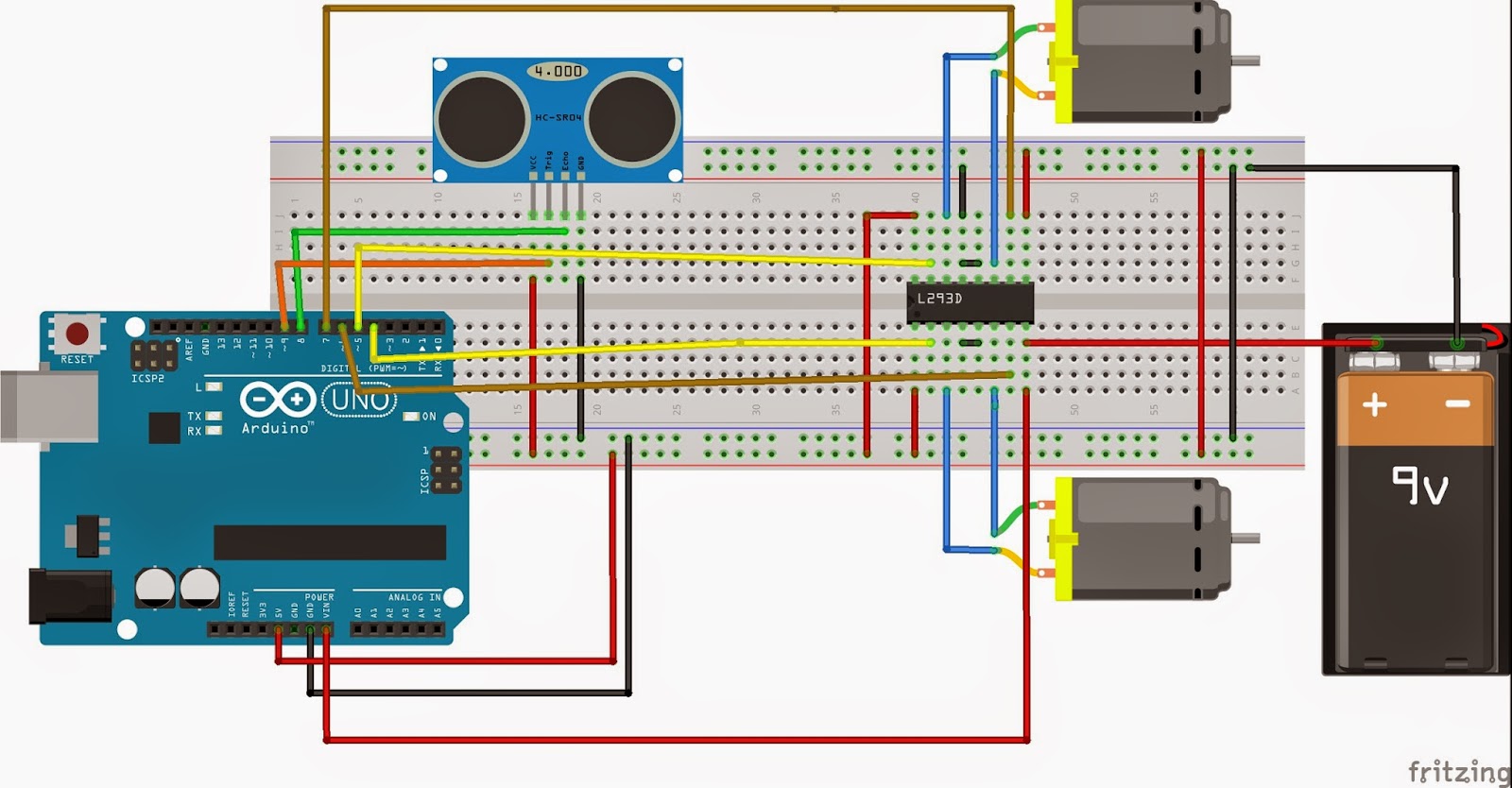
Arduino Uno Rev3
2
DC motor (generic)
1
Male/Male Jumper Wires
2
9V Battery Clip
1
Servos (Tower Pro MG996R)
1
Female/Female Jumper Wires
1
Ultrasonic Sensor - HC-SR04 (Generic)
3
Breadboard (generic)
1
Male/Female Jumper Wires
2
9V battery (generic)
1
Dual H-Bridge motor drivers L293D
Software & Tools
1
Arduino Web Editor
Arduino IDE
Project description
Code
servo software
arduino
servo software
arduino
robot software
arduino
Downloadable files
servo control
servo control

obstacle robot
obstacle robot

servo control
servo control

obstacle robot
obstacle robot
Comments
Only logged in users can leave comments