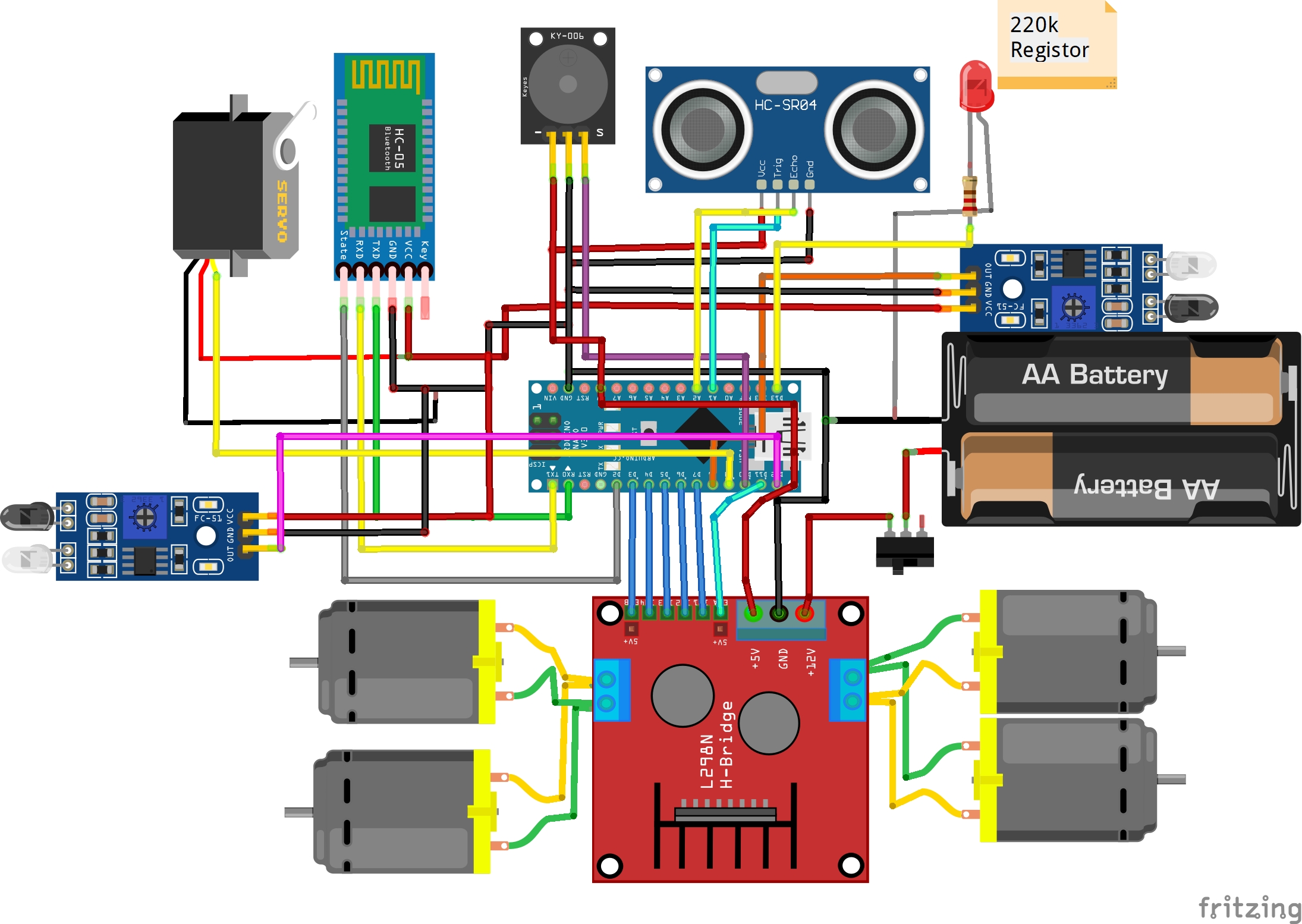
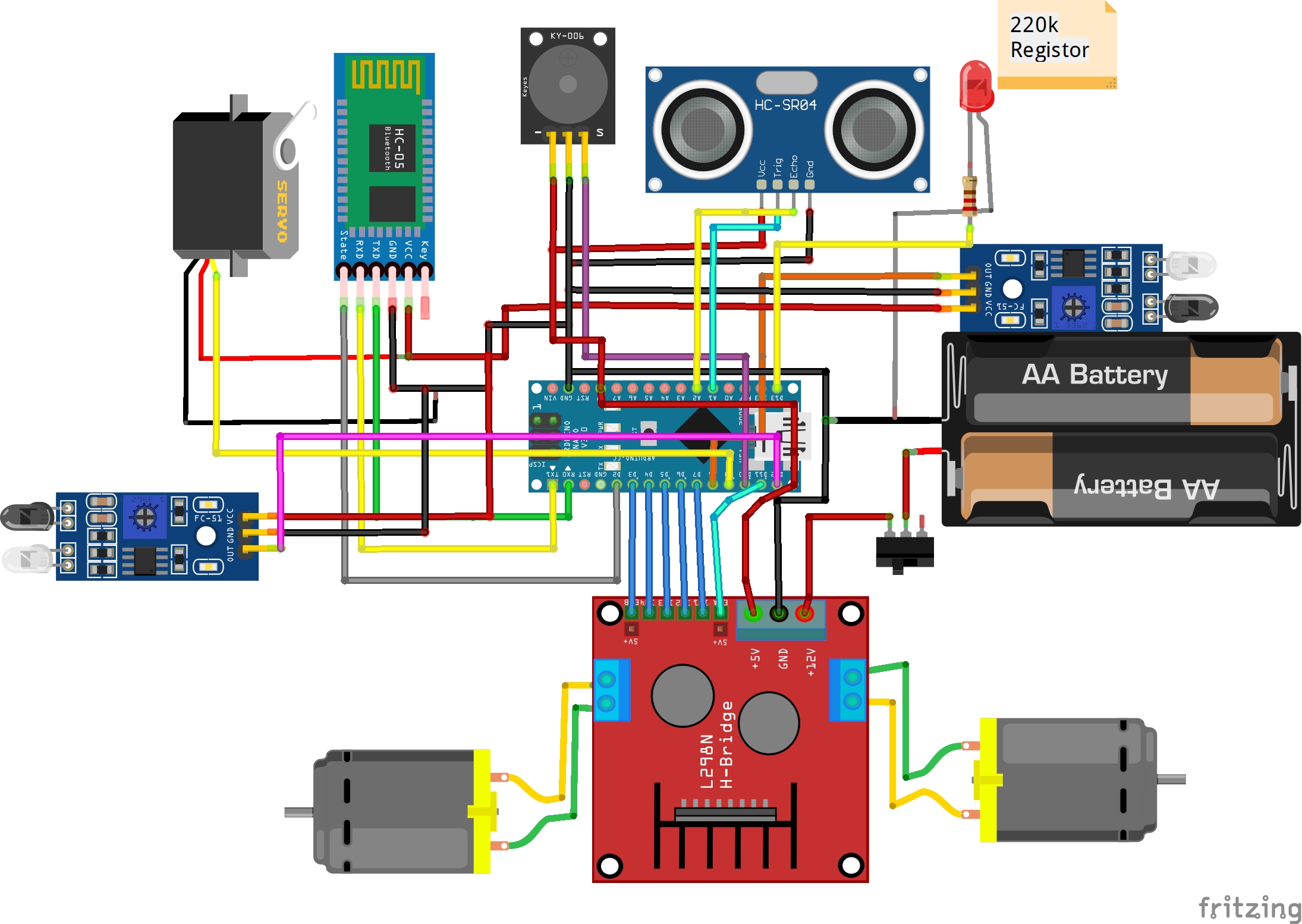
4 WD/2WD auto obstacle avoidance car / Bluetooth control car
This is 4 Wheel car based on Arduino which can be drive automatically on its own by detecting obstacle or you can take full control manually
Devices & Components
Arduino Nano
HC-05 Bluetooth Module
Slide Switch
Buzzer
SG90 Micro-servo motor
Ultrasonic Sensor - HC-SR04 (Generic)
IR Obstacle Sensor
Dual H-Bridge motor drivers L298
LED (generic)
Battery Holder, 18650 x 2
Battery, 3.6 V
Maker Essentials - Micro-motors & Grippy Wheels
Jumper wires (generic)
Arduino Nano I/O Shield
Hardware & Tools
Soldering iron (generic)
Multitool, Screwdriver
Solder Wire, Lead Free
Software & Tools
Bluetooth RC Controller
Arduino IDE
Project description
Code
4WD/2WD car Bluetooth Manual / Auto obstacle avoidance (Auto Pilot Mode)
arduino
Updated Code for Obstacle avoidabce
1//Project developed by Alok Dubey 2//Avaiable free to do the changes as per your need :) 3//Date :16 June 2021 (v.13) 4 5#include <Servo.h> // Include Servo Library 6#include <NewPing.h> // Include Newping Library 7 8// L298N Control Pins 9const int LeftMotorForward = 4; // Black wire then Red Wire of Left Motor, combile black+black , Red+Red of Both Motor 10const int LeftMotorBackward = 5;// Black wire then Red Wire of Left Motor, combile black+black , Red+Red of Both Motor 11const int RightMotorForward = 6;// Red Wire then Black Wire of Right Motor, combile black+black , Red+Red of Both Motor 12const int RightMotorBackward = 7;// Red Wire then Black Wire of Right Motor, combile black+black , Red+Red of Both Motor 13const int Ena = 3; // To control Speed of Motor A 14const int Enb = 11;// To control Speed of Motor B 15const int buzzer = 10; //buzzer to arduino pin 10 16const int BTState = 2; //STATE pin of Bluetooth (when bluetooth not connected it is LOW) 17 18#define TRIGGER_PIN A1 // Arduino pin tied to trigger pin on the ultrasonic sensor. 19#define ECHO_PIN A2 // Arduino pin tied to echo pin on the ultrasonic sensor. 20#define MAX_DISTANCE 250 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 250cm. 21#define obstacleF 12 22#define backLED 13 23#define obstaclePin 8 // IR Sensor OUT pin 24Servo servo_motor; // Servo's name 25NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. 26 27int isObstacle = HIGH;//HIGH means No Obstacle 28int isObstacleF = LOW;//LOW means CAR IS ON GROUND 29int distance = 0 ; 30int i, j = 0 ; 31 32void setup() 33{ 34 35 // Set L298N Control Pins as Output 36 pinMode(RightMotorForward, OUTPUT); 37 pinMode(LeftMotorForward, OUTPUT); 38 pinMode(LeftMotorBackward, OUTPUT); 39 pinMode(RightMotorBackward, OUTPUT); 40 pinMode(Ena, OUTPUT); 41 pinMode(Enb, OUTPUT); 42 pinMode(buzzer, OUTPUT); // Set buzzer - pin 10 as an output 43 pinMode(obstacleF, INPUT); 44 pinMode(backLED, OUTPUT); 45 pinMode(BTState, INPUT); 46 pinMode(obstaclePin, INPUT); 47 48 // Keep Motor not moving initially. 49 digitalWrite(RightMotorForward, LOW); 50 digitalWrite(RightMotorBackward, LOW); 51 digitalWrite(LeftMotorForward, LOW); 52 digitalWrite(LeftMotorBackward, LOW); 53 digitalWrite(backLED, HIGH); 54 digitalWrite(buzzer, LOW); 55 analogWrite(Ena, 0); 56 analogWrite(Enb, 0); 57 58 servo_motor.attach(9); // Attachs the servo on pin 9 to servo object. 59 servo_motor.write(90); // Set at 90 degrees. 60 delay(2000); // Wait for 2000ms. 61 distance = readPing(); // Get Ping Distance. 62 delay(100); // Wait for 1ms. 63 distance = readPing(); 64 delay(100); 65 66 Serial.begin(9600); 67} 68 69void loop() 70 71{ 72 if (digitalRead(BTState) == LOW) 73 { 74 int distanceRight = 0; 75 int distanceLeft = 0; 76 if (distance <= 45)//its in cm change as per your need 77 { 78 digitalWrite(buzzer, HIGH); 79 delay(100); 80 digitalWrite(buzzer, LOW); 81 82 moveStop(); 83 moveBackward(); 84 delay(300); 85 moveStop(); 86 distanceRight = lookRight(); 87 delay(500); 88 distanceLeft = lookLeft(); 89 delay(500); 90 91 if (distanceRight > distanceLeft) 92 { 93 turnRight(); 94 delay(600); 95 moveStop(); 96 distance = readPing(); 97 } 98 else if (distanceLeft > distanceRight) 99 { 100 turnLeft(); 101 delay(600); 102 moveStop(); 103 distance = readPing(); 104 } 105 106 } 107 else 108 { 109 isObstacleF = digitalRead(obstacleF); // to avoide to fall where is no ground / or its farther then sensor set distance 110 if (isObstacleF == HIGH) 111 { 112 moveStop(); 113 moveBackward(); 114 delay(300); 115 if (distanceLeft > distanceRight) 116 { 117 turnLeft(); 118 delay(500); 119 moveStop(); 120 distance = readPing(); 121 } 122 else 123 { 124 turnRight(); 125 delay(500); 126 moveStop(); 127 distance = readPing(); 128 129 } 130 moveStop(); 131 } 132 else 133 { 134 moveForward(); 135 } 136 //reseting the variable after the operations 137 distance = readPing(); 138 delay(100); 139 } 140 } 141 else 142 { 143 144 if (Serial.available()) 145 { 146 moveStop(); 147 char data = Serial.read(); 148 Serial.println(data); 149 if (data == 'F') 150 { 151 distance = readPing(); // Get Ping Distance. 152 if (distance <= 45) //distance in cm change as per your need 153 { 154 moveStop(); 155 moveBackward(); 156 delay(100); 157 moveStop(); 158 } 159 else 160 { 161 isObstacleF = digitalRead(obstacleF); //to avoide to fall where is no ground / or its farther then sensor set distance 162 if (isObstacleF == HIGH) 163 { 164 moveStop(); 165 moveBackward(); 166 delay(300); 167 moveStop(); 168 } 169 else 170 { 171 moveForward(); 172 } 173 } 174 } 175 if (data == 'B') 176 { 177 isObstacle = digitalRead(obstaclePin); 178 if (isObstacle == LOW) 179 { 180 moveStop(); 181 moveForward(); 182 delay(100); 183 moveStop(); 184 } 185 else 186 { 187 moveBackward(); 188 } 189 } 190 if (data == 'S') 191 { 192 moveStop(); 193 } 194 if (data == 'L') 195 { 196 turnLeft(); 197 } 198 if (data == 'R') 199 { 200 turnRight(); 201 } 202 } 203 204 } 205 206 distance = readPing(); 207 208} 209 210// Loop ends here 211 212//--------------------Declaring Function below for Loop---------------------------------------------------------------------------------------------------- 213 214int lookRight() // Look Right Function for Servo Motor 215{ 216 servo_motor.write(180); 217 delay(500); 218 int distance = readPing(); 219 delay(100); 220 servo_motor.write(90); 221 return distance; 222} 223 224int lookLeft() // Look Left Function for Servo Motor 225{ 226 servo_motor.write(0); 227 delay(500); 228 int distance = readPing(); 229 delay(100); 230 servo_motor.write(90); 231 return distance; 232 233} 234 235int readPing() // Read Ping Function for Ultrasonic Sensor. 236{ 237 delay(40); // Wait 40ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings. 238 int cm = sonar.ping_cm(); //Send ping, get ping distance in centimeters (cm). 239 if (cm == 0) 240 { 241 cm = 250; 242 } 243 return cm; 244} 245 246 247void moveStop() // Move Stop Function for Motor Driver. 248{ 249 250 digitalWrite(RightMotorForward, LOW); 251 digitalWrite(RightMotorBackward, LOW); 252 digitalWrite(LeftMotorForward, LOW); 253 digitalWrite(LeftMotorBackward, LOW); 254} 255 256void moveForward() // Move Forward Function for Motor Driver. 257{ 258 for (i = 0; i <= 90; i ++) 259 260 { 261 analogWrite(Ena, i); 262 analogWrite(Enb, i); 263 digitalWrite(RightMotorForward, HIGH); 264 digitalWrite(RightMotorBackward, LOW); 265 digitalWrite(LeftMotorForward, HIGH); 266 digitalWrite(LeftMotorBackward, LOW); 267 268 } 269} 270 271void moveBackward() // Move Backward Function for Motor Driver. 272{ 273 for (j = 0; j <= 100; j ++) 274 { 275 analogWrite(Ena, j); 276 analogWrite(Enb, j); 277 digitalWrite(RightMotorForward, LOW); 278 digitalWrite(RightMotorBackward, HIGH); 279 digitalWrite(LeftMotorForward, LOW); 280 digitalWrite(LeftMotorBackward, HIGH); 281 } 282} 283 284void turnRight() // Turn Right Function for Motor Driver. 285{ 286 digitalWrite(RightMotorForward, LOW); 287 digitalWrite(RightMotorBackward, HIGH); 288 digitalWrite(LeftMotorForward, HIGH); 289 digitalWrite(LeftMotorBackward, LOW); 290 291} 292 293void turnLeft() // Turn Left Function for Motor Driver. 294{ 295 digitalWrite(RightMotorForward, HIGH); 296 digitalWrite(RightMotorBackward, LOW); 297 digitalWrite(LeftMotorForward, LOW); 298 digitalWrite(LeftMotorBackward, HIGH); 299 300} 301
4WD/2WD car Bluetooth Manual / Auto obstacle avoidance (Auto Pilot Mode)
arduino
Updated Code for Obstacle avoidabce
1//Project developed by Alok Dubey 2//Avaiable free to do the changes as per your need :) 3//Date :16 June 2021 (v.13) 4 5#include <Servo.h> // Include Servo Library 6#include <NewPing.h> // Include Newping Library 7 8// L298N Control Pins 9const int LeftMotorForward = 4; // Black wire then Red Wire of Left Motor, combile black+black , Red+Red of Both Motor 10const int LeftMotorBackward = 5;// Black wire then Red Wire of Left Motor, combile black+black , Red+Red of Both Motor 11const int RightMotorForward = 6;// Red Wire then Black Wire of Right Motor, combile black+black , Red+Red of Both Motor 12const int RightMotorBackward = 7;// Red Wire then Black Wire of Right Motor, combile black+black , Red+Red of Both Motor 13const int Ena = 3; // To control Speed of Motor A 14const int Enb = 11;// To control Speed of Motor B 15const int buzzer = 10; //buzzer to arduino pin 10 16const int BTState = 2; //STATE pin of Bluetooth (when bluetooth not connected it is LOW) 17 18#define TRIGGER_PIN A1 // Arduino pin tied to trigger pin on the ultrasonic sensor. 19#define ECHO_PIN A2 // Arduino pin tied to echo pin on the ultrasonic sensor. 20#define MAX_DISTANCE 250 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 250cm. 21#define obstacleF 12 22#define backLED 13 23#define obstaclePin 8 // IR Sensor OUT pin 24Servo servo_motor; // Servo's name 25NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. 26 27int isObstacle = HIGH;//HIGH means No Obstacle 28int isObstacleF = LOW;//LOW means CAR IS ON GROUND 29int distance = 0 ; 30int i, j = 0 ; 31 32void setup() 33{ 34 35 // Set L298N Control Pins as Output 36 pinMode(RightMotorForward, OUTPUT); 37 pinMode(LeftMotorForward, OUTPUT); 38 pinMode(LeftMotorBackward, OUTPUT); 39 pinMode(RightMotorBackward, OUTPUT); 40 pinMode(Ena, OUTPUT); 41 pinMode(Enb, OUTPUT); 42 pinMode(buzzer, OUTPUT); // Set buzzer - pin 10 as an output 43 pinMode(obstacleF, INPUT); 44 pinMode(backLED, OUTPUT); 45 pinMode(BTState, INPUT); 46 pinMode(obstaclePin, INPUT); 47 48 // Keep Motor not moving initially. 49 digitalWrite(RightMotorForward, LOW); 50 digitalWrite(RightMotorBackward, LOW); 51 digitalWrite(LeftMotorForward, LOW); 52 digitalWrite(LeftMotorBackward, LOW); 53 digitalWrite(backLED, HIGH); 54 digitalWrite(buzzer, LOW); 55 analogWrite(Ena, 0); 56 analogWrite(Enb, 0); 57 58 servo_motor.attach(9); // Attachs the servo on pin 9 to servo object. 59 servo_motor.write(90); // Set at 90 degrees. 60 delay(2000); // Wait for 2000ms. 61 distance = readPing(); // Get Ping Distance. 62 delay(100); // Wait for 1ms. 63 distance = readPing(); 64 delay(100); 65 66 Serial.begin(9600); 67} 68 69void loop() 70 71{ 72 if (digitalRead(BTState) == LOW) 73 { 74 int distanceRight = 0; 75 int distanceLeft = 0; 76 if (distance <= 45)//its in cm change as per your need 77 { 78 digitalWrite(buzzer, HIGH); 79 delay(100); 80 digitalWrite(buzzer, LOW); 81 82 moveStop(); 83 moveBackward(); 84 delay(300); 85 moveStop(); 86 distanceRight = lookRight(); 87 delay(500); 88 distanceLeft = lookLeft(); 89 delay(500); 90 91 if (distanceRight > distanceLeft) 92 { 93 turnRight(); 94 delay(600); 95 moveStop(); 96 distance = readPing(); 97 } 98 else if (distanceLeft > distanceRight) 99 { 100 turnLeft(); 101 delay(600); 102 moveStop(); 103 distance = readPing(); 104 } 105 106 } 107 else 108 { 109 isObstacleF = digitalRead(obstacleF); // to avoide to fall where is no ground / or its farther then sensor set distance 110 if (isObstacleF == HIGH) 111 { 112 moveStop(); 113 moveBackward(); 114 delay(300); 115 if (distanceLeft > distanceRight) 116 { 117 turnLeft(); 118 delay(500); 119 moveStop(); 120 distance = readPing(); 121 } 122 else 123 { 124 turnRight(); 125 delay(500); 126 moveStop(); 127 distance = readPing(); 128 129 } 130 moveStop(); 131 } 132 else 133 { 134 moveForward(); 135 } 136 //reseting the variable after the operations 137 distance = readPing(); 138 delay(100); 139 } 140 } 141 else 142 { 143 144 if (Serial.available()) 145 { 146 moveStop(); 147 char data = Serial.read(); 148 Serial.println(data); 149 if (data == 'F') 150 { 151 distance = readPing(); // Get Ping Distance. 152 if (distance <= 45) //distance in cm change as per your need 153 { 154 moveStop(); 155 moveBackward(); 156 delay(100); 157 moveStop(); 158 } 159 else 160 { 161 isObstacleF = digitalRead(obstacleF); //to avoide to fall where is no ground / or its farther then sensor set distance 162 if (isObstacleF == HIGH) 163 { 164 moveStop(); 165 moveBackward(); 166 delay(300); 167 moveStop(); 168 } 169 else 170 { 171 moveForward(); 172 } 173 } 174 } 175 if (data == 'B') 176 { 177 isObstacle = digitalRead(obstaclePin); 178 if (isObstacle == LOW) 179 { 180 moveStop(); 181 moveForward(); 182 delay(100); 183 moveStop(); 184 } 185 else 186 { 187 moveBackward(); 188 } 189 } 190 if (data == 'S') 191 { 192 moveStop(); 193 } 194 if (data == 'L') 195 { 196 turnLeft(); 197 } 198 if (data == 'R') 199 { 200 turnRight(); 201 } 202 } 203 204 } 205 206 distance = readPing(); 207 208} 209 210// Loop ends here 211 212//--------------------Declaring Function below for Loop---------------------------------------------------------------------------------------------------- 213 214int lookRight() // Look Right Function for Servo Motor 215{ 216 servo_motor.write(180); 217 delay(500); 218 int distance = readPing(); 219 delay(100); 220 servo_motor.write(90); 221 return distance; 222} 223 224int lookLeft() // Look Left Function for Servo Motor 225{ 226 servo_motor.write(0); 227 delay(500); 228 int distance = readPing(); 229 delay(100); 230 servo_motor.write(90); 231 return distance; 232 233} 234 235int readPing() // Read Ping Function for Ultrasonic Sensor. 236{ 237 delay(40); // Wait 40ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings. 238 int cm = sonar.ping_cm(); //Send ping, get ping distance in centimeters (cm). 239 if (cm == 0) 240 { 241 cm = 250; 242 } 243 return cm; 244} 245 246 247void moveStop() // Move Stop Function for Motor Driver. 248{ 249 250 digitalWrite(RightMotorForward, LOW); 251 digitalWrite(RightMotorBackward, LOW); 252 digitalWrite(LeftMotorForward, LOW); 253 digitalWrite(LeftMotorBackward, LOW); 254} 255 256void moveForward() // Move Forward Function for Motor Driver. 257{ 258 for (i = 0; i <= 90; i ++) 259 260 { 261 analogWrite(Ena, i); 262 analogWrite(Enb, i); 263 digitalWrite(RightMotorForward, HIGH); 264 digitalWrite(RightMotorBackward, LOW); 265 digitalWrite(LeftMotorForward, HIGH); 266 digitalWrite(LeftMotorBackward, LOW); 267 268 } 269} 270 271void moveBackward() // Move Backward Function for Motor Driver. 272{ 273 for (j = 0; j <= 100; j ++) 274 { 275 analogWrite(Ena, j); 276 analogWrite(Enb, j); 277 digitalWrite(RightMotorForward, LOW); 278 digitalWrite(RightMotorBackward, HIGH); 279 digitalWrite(LeftMotorForward, LOW); 280 digitalWrite(LeftMotorBackward, HIGH); 281 } 282} 283 284void turnRight() // Turn Right Function for Motor Driver. 285{ 286 digitalWrite(RightMotorForward, LOW); 287 digitalWrite(RightMotorBackward, HIGH); 288 digitalWrite(LeftMotorForward, HIGH); 289 digitalWrite(LeftMotorBackward, LOW); 290 291} 292 293void turnLeft() // Turn Left Function for Motor Driver. 294{ 295 digitalWrite(RightMotorForward, HIGH); 296 digitalWrite(RightMotorBackward, LOW); 297 digitalWrite(LeftMotorForward, LOW); 298 digitalWrite(LeftMotorBackward, HIGH); 299 300} 301
Downloadable files
4WD car Bluetooth Manual / Auto obstacle avoidance (Auto Pilot Mode)
For 4 Wheel Car
4WD car Bluetooth Manual / Auto obstacle avoidance (Auto Pilot Mode)
4WD car Bluetooth Manual / Auto obstacle avoidance (Auto Pilot Mode)
For 4 Wheel Car
4WD car Bluetooth Manual / Auto obstacle avoidance (Auto Pilot Mode)
2WD car Bluetooth Manual / Auto obstacle avoidance (Auto Pilot Mode)
For 2 Wheel Car
2WD car Bluetooth Manual / Auto obstacle avoidance (Auto Pilot Mode)
Comments
Only logged in users can leave comments