BLE Autonomous Rover
The tools include Arduino 101, SeeedStudio Skeleton Bot -4WD Mobile Robotic Platform, SeeedStudio Grove Starter Kit for Arduino101, etc.
Devices & Components
Arduino 101
Hardware & Tools
Tape, Velcro® Stick On Tape/Strip
Nordic Semiconductor BLE Toolbox
Software & Tools
BLE Autonomous Rover
Project description
Code
Ardunio 101 Based 4WD Rover Code
c_cpp
This code drives an Arduino101 microcontroller board using built-in Bluetooth Low Energy (BLE) functionality, 4 sets of motor on the SEEDstudio Skeleton Bot chassis driven by 2 grove I2C motor control drivers. Additional components included from SEEDstudio include: Grove LED Socket, Green LED, Grove 80cm proximity sensor.
1/* Authors: Oliver Chen, Raad Hashim, Prashant Lalwani and Purval Sule 2 3 Autonomous Arduino 101 based 4WD Rover code. 4 This code drives an Arduino101 microcontroller board 5 using the builtin Bluetooth Low Energy (BLE) functonality 6 , 4 sets of motor on the SEEDstudio Skeleton Bot chassis 7 driven by 2 grove I2C motor control drivers. 8 Additional components included from SEEDstudio include: 9 Grove LED Socket, Green LED, Grove 80cm proximity sensor 10 11 Motor driver example code found at: 12 https://github.com/Seeed-Studio/Grove_I2C_Motor_Driver 13 14 Initial UART BLE from Dave Shade's Arduino101 BLE Rover 15 16 This demo code is free software; you can redistribute it and/or 17 modify it under the terms of the GNU Lesser General Public 18 License as published by the Free Software Foundation; either 19 version 2.1 of the License, or (at your option) any later version. 20 21 This library is distributed in the hope that it will be useful, 22 but WITHOUT ANY WARRANTY; without even the implied warranty of 23 MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU 24 Lesser General Public License for more details. 25 26 You should have received a copy of the GNU Lesser General Public 27 License along with this library; if not, write to the Free Software 28 Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA 29 30 31*/ 32 33// Tested on Ubuntu 16.04, Arduino 1.6.13, and corelibs 1.0.7 34 35//////////////// 36// Libraries // 37////////////// 38 39// Curie Bluetooth Library 40#include <CurieBLE.h> 41// I2C Library 42#include <Wire.h> 43 44////////////// 45// Defines // 46//////////// 47 48// defines required by motor driver functions 49#define MotorSpeedSet 0x82 50#define PWMFrequenceSet 0x84 51#define DirectionSet 0xaa 52#define MotorSetA 0xa1 53#define MotorSetB 0xa5 54#define Nothing 0x01 55// Note: each I2C motor driver has a unique address (selectable on board) 56#define I2CMotorDriver_right_Addr 0x01 // Set the address of the I2CMotorDriver - right 57#define I2CMotorDriver_left_Addr 0x02 // Set the address of the I2CMotorDriver - left 58#define IR_PROXIMITY_SENSOR A1 // Analog input pin that is attached to the sensor 59#define ADC_REF 5//reference voltage of ADC is 5v.If the Vcc switch on the Seeeduino 60 //board switches to 3V3, the ADC_REF should be 3.3 61float voltage;//the sensor voltage, you can calculate or find the distance 62 // to the reflective object according to the figures 63 //on page 4 or page 5 of the datasheet of the GP2Y0A21YK. 64 65 66/////////////// 67// Pin list // 68///////////// 69 70const int connect_led_pin = 2; // pin used for connect status LED. Doubles up as Calibration failed 71 72////////////////////////////////////// 73// Motor Speed and direction task // 74//////////////////////////////////// 75 76// Function to set Motor A and B speed as well as direction for a specific motor driver (address) 77// Note: 1001 indicates M1 in forward and M2 in reverse direction 78// Note: Bit 0 and 1 should be a complement and Bit 1 and 2 should be complement 79void Set_MotorSpeed_and_direction(unsigned char MotorSpeedA, unsigned char MotorSpeedB, unsigned char Direction, unsigned char I2C_MotorDriver_Addr) 80{ 81 //Convert 0-100% to analog values 0-255 82 MotorSpeedA = map(MotorSpeedA, 0, 100, 0, 255); 83 MotorSpeedB = map(MotorSpeedB, 0, 100, 0, 255); 84 85 // Speed 86 Wire.beginTransmission(I2C_MotorDriver_Addr); // transmit to specified address 87 Wire.write(MotorSpeedSet); // set pwm header 88 Wire.write(MotorSpeedA); // send pwma 89 Wire.write(MotorSpeedB); // send pwmb 90 Wire.endTransmission(); // stop transmitting 91 92 // Direction 93 Wire.beginTransmission(I2C_MotorDriver_Addr); // transmit to device I2CMotorDriverAdd 94 Wire.write(DirectionSet); // Direction control header 95 Wire.write(Direction); // send direction control information 96 Wire.write(Nothing); // need to send this byte as the third byte(no meaning) 97 Wire.endTransmission(); // stop transmitting 98} 99 100/////////////////////// 101// Global Variables // 102///////////////////// 103String cmdInput; // Command received from BLE- Auto:Stop, Auto:Up, Auto:Right, Auto:Left, Auto:Back, Auto:Auto 104String lastCmd=""; 105int lastTurn=0; 106int turnTime=1000; 107 108///////////////////////////////// 109// BLE handle and definitions // 110/////////////////////////////// 111 112BLEPeripheral blePeripheral; 113BLEService uartService = BLEService("6E400001B5A3F393E0A9E50E24DCCA9E"); 114// create characteristics 115BLECharacteristic rxCharacteristic = BLECharacteristic("6E400002B5A3F393E0A9E50E24DCCA9E", BLEWriteWithoutResponse, 20); // == TX on central (central control app) 116BLECharacteristic txCharacteristic = BLECharacteristic("6E400003B5A3F393E0A9E50E24DCCA9E", BLENotify , 20); // == RX on central (central control app) 117 118bool connectionStatus = false; 119 120void roverStop(){ 121 // Turn off all Motors (to be safe) 122 Set_MotorSpeed_and_direction(0, 0, 0b1010, I2CMotorDriver_right_Addr); 123 Set_MotorSpeed_and_direction(0, 0, 0b0101, I2CMotorDriver_left_Addr); 124 Serial.println("Rover Stop"); 125} 126 127void roverUp(){ 128 Set_MotorSpeed_and_direction(40, 40, 0b1010, I2CMotorDriver_right_Addr); 129 Set_MotorSpeed_and_direction(40, 40, 0b0101, I2CMotorDriver_left_Addr); 130 Serial.println("Rover Up"); 131} 132 133void roverBack(){ 134 Set_MotorSpeed_and_direction(40, 40, 0b0101, I2CMotorDriver_right_Addr); 135 Set_MotorSpeed_and_direction(40, 40, 0b1010, I2CMotorDriver_left_Addr); 136 Serial.println("Rover Up"); 137} 138 139void roverLeft(){ 140 Set_MotorSpeed_and_direction(100, 100, 0b1010, I2CMotorDriver_right_Addr); 141 Set_MotorSpeed_and_direction(1, 1, 0b0101, I2CMotorDriver_left_Addr); 142 Serial.println("Rover Left"); 143} 144 145void roverRight(){ 146 Set_MotorSpeed_and_direction(1, 1, 0b1010, I2CMotorDriver_right_Addr); 147 Set_MotorSpeed_and_direction(100, 100, 0b0101, I2CMotorDriver_left_Addr); 148 Serial.println("Rover Right"); 149} 150 151void roverAvoidLeft(){ 152 Set_MotorSpeed_and_direction(100, 100, 0b1010, I2CMotorDriver_right_Addr); 153 Set_MotorSpeed_and_direction(50, 50, 0b1010, I2CMotorDriver_left_Addr); 154 Serial.println("Rover Avoid Left"); 155 delay(turnTime); 156} 157 158void roverAvoidRight(){ 159 Set_MotorSpeed_and_direction(50, 50, 0b0101, I2CMotorDriver_right_Addr); 160 Set_MotorSpeed_and_direction(100, 100, 0b0101, I2CMotorDriver_left_Addr); 161 Serial.println("Rover Avoid Right"); 162 delay(turnTime); 163} 164 165void roverAuto(){ 166 lastCmd=cmdInput; 167 Serial.println("Rover Auto"); 168 if (voltage < 1) { 169 roverUp(); 170 } else if (lastTurn==0) { 171 roverAvoidRight(); 172 lastTurn=1; 173 174 } else { 175 roverAvoidLeft(); 176 lastTurn=0; 177 } 178 179} 180void fullStop(){ 181 roverStop(); 182} 183 184///////////////// 185// Setup Loop // 186/////////////// 187 188void setup() 189{ 190 // Setting up serial connection 191 Serial.begin(9600); 192 193 // join i2c bus (address optional for master) 194 Wire.begin(); 195 196 // wait to make sure I2C is initialized 197 delayMicroseconds(10000); 198 199 // specifying connection LED pin as output 200 pinMode(connect_led_pin, OUTPUT); 201 202 blePeripheral.setLocalName("4WDUART"); 203 blePeripheral.setAdvertisedServiceUuid(uartService.uuid()); 204 // add service, rx and tx characteristics: 205 blePeripheral.addAttribute(uartService); 206 blePeripheral.addAttribute(rxCharacteristic); 207 blePeripheral.addAttribute(txCharacteristic); 208 // assign event handlers for connected, disconnected to peripheral 209 blePeripheral.setEventHandler(BLEConnected, blePeripheralConnectHandler); 210 blePeripheral.setEventHandler(BLEDisconnected, blePeripheralDisconnectHandler); 211 rxCharacteristic.setEventHandler(BLEWritten, rxCharacteristicWritten); 212 blePeripheral.begin(); 213 delay(5000); 214 Serial.println("BLE UART Peripheral"); 215} 216 217//////////////// 218// Main loop // 219////////////// 220 221void loop() 222{ 223 // Keep polling over the Peripheral 224 blePeripheral.poll(); 225 226 // Check BLE connection before executing any code 227 if (connectionStatus) 228 { 229 // Turn on connection LED 230 digitalWrite(connect_led_pin, HIGH); 231 232 Serial.print(String(cmdInput)); 233 voltage = getVoltage(); 234 Serial.print(" sensor voltage = " ); 235 Serial.println(voltage); 236 237 if (String(cmdInput) == "Auto:Stop") { 238 roverStop(); 239 } else if ((String(cmdInput) == "Auto:Auto") or (String(lastCmd) == "Auto:Auto")){ 240 roverAuto(); 241 } else if (String(cmdInput) == "Auto:Up"){ 242 roverUp(); 243 } else if (String(cmdInput) == "Auto:Left"){ 244 roverLeft(); 245 } else if (String(cmdInput) == "Auto:Right"){ 246 roverRight(); 247 } else if (String(cmdInput) == "Auto:Back"){ 248 roverBack(); 249 } else { 250 fullStop(); 251 } 252 lastCmd=cmdInput; 253 } 254 else 255 { 256 Serial.println("not connected"); 257 // Turn off connection LED 258 digitalWrite(connect_led_pin, LOW); 259 260 // Turn off everything to be safe 261 fullStop(); 262 } 263} // void loop() 264 265void blePeripheralConnectHandler(BLECentral& central) { 266 // central connected event handler 267 Serial.print("Connected event, central: "); 268 Serial.println(central.address()); 269 digitalWrite(connect_led_pin, HIGH); 270 connectionStatus = true; 271} 272 273void blePeripheralDisconnectHandler(BLECentral& central) { 274 // central disconnected event handler 275 Serial.print("Disconnected event, central: "); 276 Serial.println(central.address()); 277 digitalWrite(connect_led_pin, LOW); 278 connectionStatus = false; 279} 280 281void rxCharacteristicWritten(BLECentral& central, BLECharacteristic& characteristic) { 282 // central wrote new value to characteristic, update LED 283 Serial.print("Characteristic event, written: "); 284 if (characteristic.value()) { //null pointer check 285 int len = characteristic.valueLength(); //get size 286 if (cmdInput) { 287 lastCmd=cmdInput; 288 } 289 cmdInput= ""; 290 for(int i=0; i<len; i++){ 291 cmdInput+= (char)*(characteristic.value()+i); 292 } 293 Serial.println(cmdInput); 294 } 295} 296 297////////////////////////////////////////////////////////// 298//Get voltage from the sensor connected to analog pin A0// 299//Parameter:-void // 300//Return: -float,the voltage of the analog pin // 301////////////////////////////////////////////////////////// 302float getVoltage() 303{ 304 int sensor_value; 305 int sum; 306 // read the analog in value: 307 for (int i = 0;i < 20;i ++)//Continuous sampling 20 times 308 { 309 sensor_value = analogRead(IR_PROXIMITY_SENSOR); 310 sum += sensor_value; 311 } 312 sensor_value = sum / 20; 313 float voltage; 314 voltage = (float)sensor_value*ADC_REF/1024; 315 return voltage; 316} 317SCHEMATICS 318Base Rover Schematic 319
Downloadable files
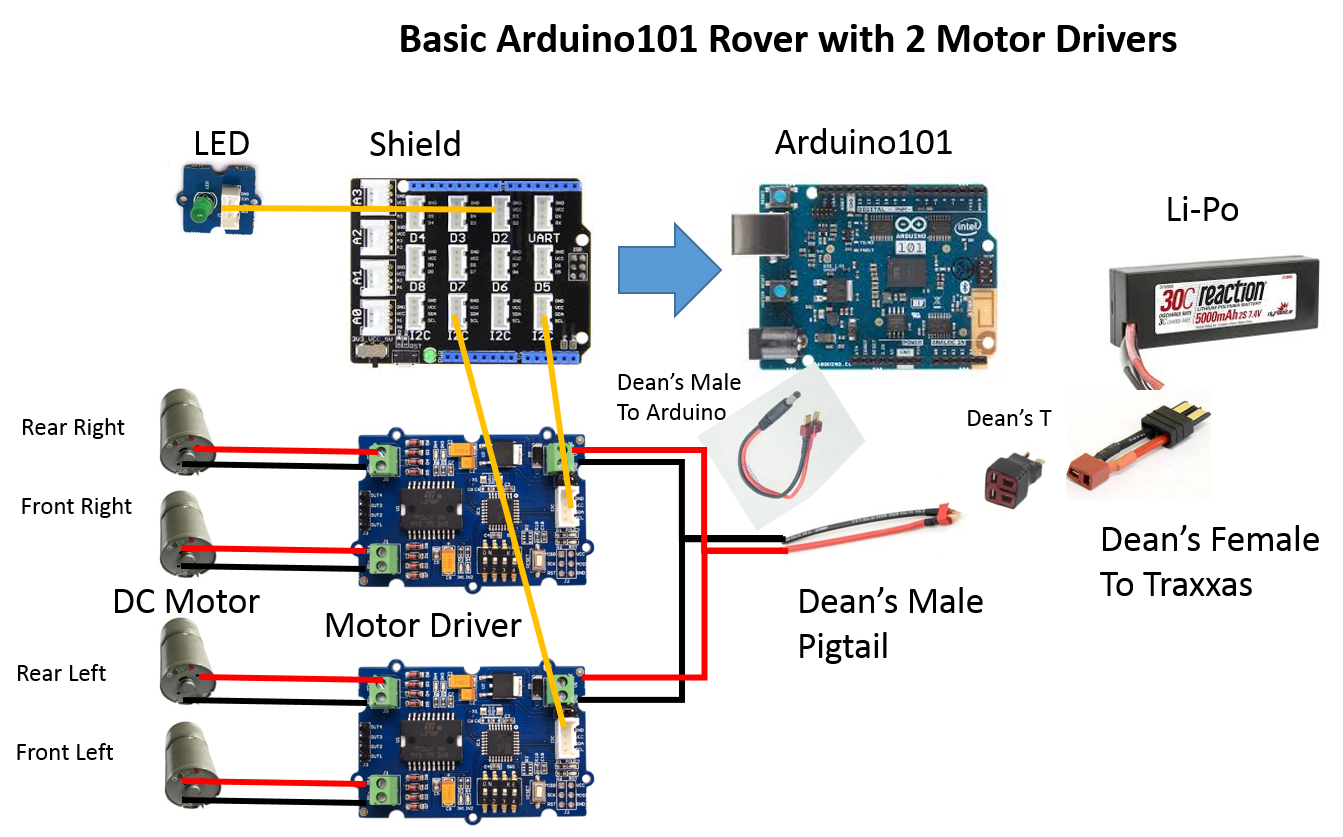
Arduino101 Rover
This is a basic Arduino101 rover with 2 motor drivers!
Arduino101 Rover
Arduino101 Rover
This is a basic Arduino101 rover with 2 motor drivers!
Arduino101 Rover
Comments
Only logged in users can leave comments