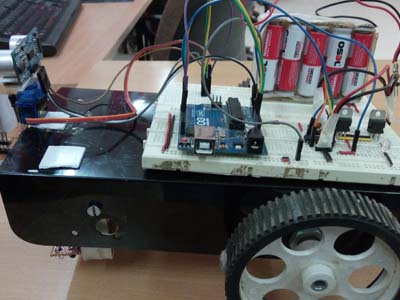
Arduino Based Rotating Head Obstacle Avoiding Robot
This autonomous robot is built on Arduino UNO and can sense its environment with the help of an ultrasonic sensor.
Project description
Code
Program Code
h
1//Program to 2 3#include <Servo.h> 4 5#include <NewPing.h> 6 7Servo myservo; 8 9//define the pins to be connected to ultrasonic sensor 10 11#define trigPin A0 12 13#define echoPin A1 14 15//define the pins to be connected to ultrasonic sensor 16 17#define LeftMotor1 4 18 19#define LeftMotor2 5 20 21#define RightMotor1 2 22 23#define RightMotor2 3 24 25#define maxdist 300 26 27#define objdist 23 28 29NewPing sonar(trigPin, echoPin, maxdist); 30 31int leftDistance, rightDistance; 32 33//setup function to define the pinmodes 34 35void setup() 36 37{ 38 39 pinMode(LeftMotor1, OUTPUT); 40 41 pinMode(LeftMotor2, OUTPUT); 42 43 pinMode(RightMotor1, OUTPUT); 44 45 pinMode(RightMotor2, OUTPUT); 46 47 48 pinMode(trigPin, OUTPUT); 49 50 pinMode(echoPin, INPUT); 51 52 myservo.attach(11); 53 54 myservo.write(90); 55 56 57 delay(1000); 58 59} 60 61//Loop infinite function 62 63void loop() 64 65{ 66 67 int read_dist; 68 69 //Make servo to turn 90 degree 70 71 myservo.write(90); 72 73 74 75 delay(90); 76 77 //calling read sensor function to read the sensor data 78 79 read_dist = readsensors(); 80 81 //checking the distance that is measured with the predefined value 82 83 if(read_dist < objdist) 84 85 { 86 87 //if low calling the decide path function 88 89 decide_path(); 90 91 } 92 93 //calling the move forward function to move the robot forward 94 95 moveforward(); 96 97 98 delay(500); 99 100} 101 102//Function to read the sensor value 103 104int readsensors() 105 106{ 107 108 int distance; 109 110 111 delay(70); 112 113 //using the newping.h library function to measure the distance 114 115 unsigned int uS = sonar.ping(); 116 117 distance = uS/US_ROUNDTRIP_CM; 118 119 return distance; 120 121} 122 123void decide_path() 124 125{ 126 127 robostop(); 128 129 //rotating the servo to 3 degree to right side 130 131 myservo.write(3); 132 133 delay(500); 134 135 //calling read sensor function to measure the distance on right side 136 137 rightDistance = readsensors(); 138 139 delay(500); 140 141 myservo.write(180); 142 143 delay(700); 144 145 leftDistance = readsensors(); 146 147 delay(500); 148 149 myservo.write(90); 150 151 delay(100); 152 153 check_distance(); 154 155} 156 157//function to compare the distances 158 159void check_distance() 160 161{ 162 163 //checking whether left measured distance is lesser that right 164 165 if (leftDistance < rightDistance) 166 167 { 168 169 turnright(); 170 171 } 172 173 //checking whether left measured distance is greater that right 174 175 else if (leftDistance > rightDistance) 176 177 { 178 179 turnleft(); 180 181 } 182 183 else 184 185 { 186 187 turnaround(); 188 189 } 190 191} 192 193void moveforward() 194 195{ 196 197 digitalWrite(LeftMotor1, HIGH); 198 199 digitalWrite(LeftMotor2, LOW); 200 201 digitalWrite(RightMotor1, HIGH); 202 203 digitalWrite(RightMotor2, LOW); 204 205} 206 207void turnleft() 208 209{ 210 211 digitalWrite(LeftMotor1, LOW); 212 213 digitalWrite(LeftMotor2, LOW); 214 215 digitalWrite(RightMotor1, HIGH); 216 217 digitalWrite(RightMotor2, LOW); 218 219 delay(350); 220 221 moveforward(); 222 223} 224 225void turnright() 226 227{ 228 229 digitalWrite(LeftMotor1, HIGH); 230 231 digitalWrite(LeftMotor2, LOW); 232 233 digitalWrite(RightMotor1, LOW); 234 235 digitalWrite(RightMotor2, LOW); 236 237 delay(350); 238 239 moveforward(); 240 241} 242 243void turnaround() 244 245{ 246 247 digitalWrite(LeftMotor1, LOW); 248 249 digitalWrite(LeftMotor2, HIGH); 250 251 digitalWrite(RightMotor1, HIGH); 252 253 digitalWrite(RightMotor2, LOW); 254 255 delay(700); 256 257 moveforward(); 258 259} 260 261void robostop() 262 263{ 264 265 digitalWrite(LeftMotor1, LOW); 266 267 digitalWrite(LeftMotor2, LOW); 268 269 digitalWrite(RightMotor1, LOW); 270 271 digitalWrite(RightMotor2, LOW); 272 273}
Downloadable files
Arduino Atutonomous Robot
Arduino Atutonomous Robot
Arduino Atutonomous Robot
Arduino Atutonomous Robot
Comments
Only logged in users can leave comments