Buck Converter
Code for a controller of a Buck-type DC-DC source, based on the block diagram of a Step-Down Switching Regulator
Devices & Components
Arduino Nano
Resistor 4.75k ohm
1N4007 – High Voltage, High Current Rated Diode
Resistor 1k ohm
1N5819 – 1A Schottky Barrier Rectifier
Capacitor 220 µF
General Purpose Transistor NPN
Resistor 10k ohm
MOSFET Transistor, P Channel
Hardware & Tools
Cable Cutter, 143mm
Soldering iron (generic)
Solder Wire, Lead Free
Prototyping Kit, Breadboard
Project description
Code
Buck_converter.ino
c_cpp
You can use this code easily by changing the voltage to be regulated in the code. The conversion factor comes from the voltage divider used for feedback and its value is by: 1k / (1K + 4.7K)
1//*************************** Change these values at base of your needs 2 ***************************** 3#define VoltageR 9.1f //Voltage to regulate 4 5// 6 Setup of mainboard ********************************************************** 7#define 8 convertion 0.1754f //Conversion factor 9 10// Definition of inputs and outputs 11 ******************** 12const int uPin = 9; // Control voltage, this is the pin 13 called OC1A 14const int x0Pin = A0; //Voltage at the output of the second integrator 15 16// 17 Variables to signal feedback ************************* 18float FB = 0; // Feedback 19 signal 20float RV = 0; // Reference Voltage 21int e = 0; // Error variable 22float 23 Switch_cycle = 0; //Dute Cycle 24 25// Variables to time operations ************************** 26unsigned 27 long softStart = 500; 28 29void setup() { 30 31 //******************** Set 32 all inputs and outputs ********************************************************** 33 34 pinMode(uPin,OUTPUT); // Set pin OC1A as output 35 pinMode(13,OUTPUT); // 36 To indicate the device is operate 37 38 //******************** Set and Clear 39 initial *************************************************** 40 digitalWrite(13,LOW); 41 // Start Led Off 42 43 //******************** Calculate all conversions ********************************************************** 44 45 RV = (VoltageR*convertion*1024/5); //Convert voltage reference to conversion ADC 46 value 47 48 //******************* Delay before start operation ******************************************************** 49 50 SoftStartDelay(); 51 52 noInterrupts(); // disable all interrupts while 53 do configure 54 // ******************************* Set PWM frecuency ********************************************** 55 56 // Freq_PWM = 16Mhz /128 = 125 Khz 57 TCCR1A = (1<<COM1A1) | (0<<COM1A0) | 58 (0<<COM1B1) | (0<<COM1B0) | (1<<WGM11) | (0<<WGM10); 59 // COM1A1 = 1 60 ; COM1A0 = 0 ; COM1B1 = 0 ; COM1B0 = 0 ; Note: When use a inverted output, 61 you must set COM1A1 & COM1A0, if you use a normal output, you only have to must 62 COM1A1 63 // Clear output OC1A when match happen, Output OC1B disconnected 64 65 TCCR1B = (0<<ICNC1) | (0<<ICES1) | (1<<WGM13) | (1<<WGM12) | (0<<CS12) | (0<<CS11) 66 | (1<<CS10); 67 68 // ICNC1 & ICES1 are used when Timer had a external 69 signal. Unused in Fast PWM mode 70 // CS12 = 0; CS11 = 0; CS10 = 0; Select 71 no prescaler 72 // WGM13 = 1 ; WGM12 = 1; WGM11 = 1 ; WGM10 = 0; Select 73 Fast 8 bit PWM with TOP value on ICR1 74 75 ICR1H = 0x00; //Set ICR1 register 76 to 80h (#128) MSB = 0x00, LSB = 80h 77 ICR1L = 0x80; //This value is TOP of 78 the counter. Timer reach to zero when count is equal to it. 79 80 TCNT1H = 81 0x00; //Reset MSB of the timer 82 TCNT1L = 0x00; //Reset LSM of the timer 83 84 OCR1AH = 0x00; //Clear MSB of the match register, unused in Fast PWM 8 bit 85 86 OCR1AL = 0x00; //Set zero to start device off, it register is used to change dute 87 cycle 88 89 // ****************************** Set interrup by timer 2 ****************************************** 90 91 // T = (1/16MHz)*(2^8-00)*8 = 128 uS 92 TCCR2A = (0<<COM2A1) | (0<<COM2A0) | 93 (0<<COM2B1) | (0<<COM2B0) | (0<<WGM21) | (0<<WGM20); 94 // COM1A1 = 0 95 ; COM1A0 = 0 ; COM1B1 = 0 ; COM1B0 = 0 ; 96 // OC12A and OC2B both 97 are disconnected 98 99 TCCR2B = (0<<WGM22) | (0<<CS22) | (1<<CS21) | (0<<CS20); 100 101 // CS22 = 0; CS21 = 1; CS20 = 0; Select prescaler Fosc/8 102 // WGM13 103 = 0 ; WGM12 = 0; WGM11 = 0 ; WGM10 = 0; Select Normal Mode operation 104 105 TCNT2 106 = 0x00; //This register have a pre-load of the timer. However, in this case, it's 107 no have pre-load 108 OCR2A = 0x00; //Clear match register. It's unused 109 OCR2B 110 = 0x00; //Clear match register. It's unused 111 112 TIMSK2 = (0<<OCIE2B) | (0<<OCIE2A) 113 | (1<<TOIE2); // enable timer2 overflow interrupt 114 // ****************************** 115 End of the configurate ******************************************* 116 interrupts(); 117 // enable all interrupts 118} 119ISR(TIMER2_OVF_vect) // interrupt service routine 120 121{ 122 FB = (float)(analogRead(x0Pin)); //Feedback signal 123 124 float 125 k = 0.08; //Gain in close loop 126 e = RV-FB; //Error 127 128 Switch_cycle = Switch_cycle + e*k; //Control 129 if(Switch_cycle<=0) //Min 130 duty Cycle = 0 131 Switch_cycle = 0; 132 if(Switch_cycle>=122) //Mx 133 duty Cycle = 95% ;(122/128)*100 = 95.31% real value 134 Switch_cycle = 122; 135 136 OCR1AL = (unsigned char)(Switch_cycle); //Write duty cycle 137} 138void SoftStartDelay() 139 // Delay with interval of 500ms before start regulation 140{ 141 delay(softStart); 142 143 digitalWrite(13,HIGH); 144} 145void loop() { 146 // put your main code here, 147 to run repeatedly: 148 149} 150
Buck_converter.ino
c_cpp
You can use this code easily by changing the voltage to be regulated in the code. The conversion factor comes from the voltage divider used for feedback and its value is by: 1k / (1K + 4.7K)
1//*************************** Change these values at base of your needs ***************************** 2#define VoltageR 9.1f //Voltage to regulate 3 4// Setup of mainboard ********************************************************** 5#define convertion 0.1754f //Conversion factor 6 7// Definition of inputs and outputs ******************** 8const int uPin = 9; // Control voltage, this is the pin called OC1A 9const int x0Pin = A0; //Voltage at the output of the second integrator 10 11// Variables to signal feedback ************************* 12float FB = 0; // Feedback signal 13float RV = 0; // Reference Voltage 14int e = 0; // Error variable 15float Switch_cycle = 0; //Dute Cycle 16 17// Variables to time operations ************************** 18unsigned long softStart = 500; 19 20void setup() { 21 22 //******************** Set all inputs and outputs ********************************************************** 23 pinMode(uPin,OUTPUT); // Set pin OC1A as output 24 pinMode(13,OUTPUT); // To indicate the device is operate 25 26 //******************** Set and Clear initial *************************************************** 27 digitalWrite(13,LOW); // Start Led Off 28 29 //******************** Calculate all conversions ********************************************************** 30 RV = (VoltageR*convertion*1024/5); //Convert voltage reference to conversion ADC value 31 32 //******************* Delay before start operation ******************************************************** 33 SoftStartDelay(); 34 35 noInterrupts(); // disable all interrupts while do configure 36 // ******************************* Set PWM frecuency ********************************************** 37 // Freq_PWM = 16Mhz /128 = 125 Khz 38 TCCR1A = (1<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) | (1<<WGM11) | (0<<WGM10); 39 // COM1A1 = 1 ; COM1A0 = 0 ; COM1B1 = 0 ; COM1B0 = 0 ; Note: When use a inverted output, you must set COM1A1 & COM1A0, if you use a normal output, you only have to must COM1A1 40 // Clear output OC1A when match happen, Output OC1B disconnected 41 TCCR1B = (0<<ICNC1) | (0<<ICES1) | (1<<WGM13) | (1<<WGM12) | (0<<CS12) | (0<<CS11) | (1<<CS10); 42 43 // ICNC1 & ICES1 are used when Timer had a external signal. Unused in Fast PWM mode 44 // CS12 = 0; CS11 = 0; CS10 = 0; Select no prescaler 45 // WGM13 = 1 ; WGM12 = 1; WGM11 = 1 ; WGM10 = 0; Select Fast 8 bit PWM with TOP value on ICR1 46 47 ICR1H = 0x00; //Set ICR1 register to 80h (#128) MSB = 0x00, LSB = 80h 48 ICR1L = 0x80; //This value is TOP of the counter. Timer reach to zero when count is equal to it. 49 50 TCNT1H = 0x00; //Reset MSB of the timer 51 TCNT1L = 0x00; //Reset LSM of the timer 52 OCR1AH = 0x00; //Clear MSB of the match register, unused in Fast PWM 8 bit 53 OCR1AL = 0x00; //Set zero to start device off, it register is used to change dute cycle 54 55 // ****************************** Set interrup by timer 2 ****************************************** 56 // T = (1/16MHz)*(2^8-00)*8 = 128 uS 57 TCCR2A = (0<<COM2A1) | (0<<COM2A0) | (0<<COM2B1) | (0<<COM2B0) | (0<<WGM21) | (0<<WGM20); 58 // COM1A1 = 0 ; COM1A0 = 0 ; COM1B1 = 0 ; COM1B0 = 0 ; 59 // OC12A and OC2B both are disconnected 60 61 TCCR2B = (0<<WGM22) | (0<<CS22) | (1<<CS21) | (0<<CS20); 62 // CS22 = 0; CS21 = 1; CS20 = 0; Select prescaler Fosc/8 63 // WGM13 = 0 ; WGM12 = 0; WGM11 = 0 ; WGM10 = 0; Select Normal Mode operation 64 65 TCNT2 = 0x00; //This register have a pre-load of the timer. However, in this case, it's no have pre-load 66 OCR2A = 0x00; //Clear match register. It's unused 67 OCR2B = 0x00; //Clear match register. It's unused 68 69 TIMSK2 = (0<<OCIE2B) | (0<<OCIE2A) | (1<<TOIE2); // enable timer2 overflow interrupt 70 // ****************************** End of the configurate ******************************************* 71 interrupts(); // enable all interrupts 72} 73ISR(TIMER2_OVF_vect) // interrupt service routine 74{ 75 FB = (float)(analogRead(x0Pin)); //Feedback signal 76 77 float k = 0.08; //Gain in close loop 78 e = RV-FB; //Error 79 Switch_cycle = Switch_cycle + e*k; //Control 80 if(Switch_cycle<=0) //Min duty Cycle = 0 81 Switch_cycle = 0; 82 if(Switch_cycle>=122) //Mx duty Cycle = 95% ;(122/128)*100 = 95.31% real value 83 Switch_cycle = 122; 84 OCR1AL = (unsigned char)(Switch_cycle); //Write duty cycle 85} 86void SoftStartDelay() // Delay with interval of 500ms before start regulation 87{ 88 delay(softStart); 89 digitalWrite(13,HIGH); 90} 91void loop() { 92 // put your main code here, to run repeatedly: 93 94} 95
Downloadable files
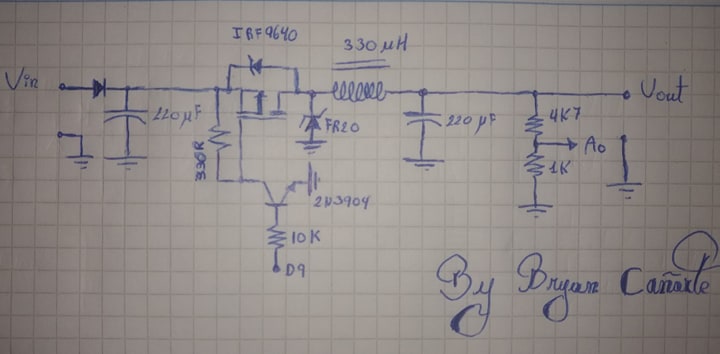
Schematic
Connect the signal marked d9 and A0 to the pins of the same name of the arduino. The MOSFET and high speed diode can be exchanged for similar components.
Schematic
Comments
Only logged in users can leave comments