Arduino Radar with Distance and Width
This is an Arduino-based project with the help of an HC-SR04 and servo motor, providing a 180-degree view.
Devices & Components
1
Arduino Uno Rev3
1
Ultrasonic Sensor - HC-SR04 (Generic)
1
Jumper wires (generic)
1
Servos (Tower Pro MG996R)
Hardware & Tools
1
Soldering iron (generic)
Software & Tools
1
eclipse
Arduino IDE
Project description
Code
java code for radar
java
1import processing.serial.*; // imports library for serial communication 2import java.awt.event.KeyEvent; // imports library for reading the data from the serial port 3import java.io.IOException; 4Serial myPort; // defines Object Serial 5// defubes variables 6String angle=""; 7String distance=""; 8String data=""; 9String noObject; 10float pixsDistance; 11int iAngle, iDistance; 12int index1=0; 13int index2=0; 14PFont orcFont; 15void setup() { 16 17 size (1920, 1080); 18 smooth(); 19 myPort = new Serial(this,"COM4", 9600); // starts the serial communication 20 myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance. 21 orcFont = loadFont("OCRAExtended-30.vlw"); 22} 23void draw() { 24 25 fill(98,245,31); 26 textFont(orcFont); 27 // simulating motion blur and slow fade of the moving line 28 noStroke(); 29 fill(0,4); 30 rect(0, 0, width, 1010); 31 32 fill(98,245,31); // green color 33 // calls the functions for drawing the radar 34 drawRadar(); 35 drawLine(); 36 drawObject(); 37 drawText(); 38} 39void serialEvent (Serial myPort) { // starts reading data from the Serial Port 40 // reads the data from the Serial Port up to the character '.' and puts it into the String variable "data". 41 data = myPort.readStringUntil('.'); 42 data = data.substring(0,data.length()-1); 43 44 index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1" 45 angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port 46 distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance 47 48 // converts the String variables into Integer 49 iAngle = int(angle); 50 iDistance = int(distance); 51} 52void drawRadar() { 53 pushMatrix(); 54 translate(960,1000); // moves the starting coordinats to new location 55 noFill(); 56 strokeWeight(2); 57 stroke(98,245,31); 58 // draws the arc lines 59 arc(0,0,1800,1800,PI,TWO_PI); 60 arc(0,0,1400,1400,PI,TWO_PI); 61 arc(0,0,1000,1000,PI,TWO_PI); 62 arc(0,0,600,600,PI,TWO_PI); 63 // draws the angle lines 64 line(-960,0,960,0); 65 line(0,0,-960*cos(radians(30)),-960*sin(radians(30))); 66 line(0,0,-960*cos(radians(60)),-960*sin(radians(60))); 67 line(0,0,-960*cos(radians(90)),-960*sin(radians(90))); 68 line(0,0,-960*cos(radians(120)),-960*sin(radians(120))); 69 line(0,0,-960*cos(radians(150)),-960*sin(radians(150))); 70 line(-960*cos(radians(30)),0,960,0); 71 popMatrix(); 72} 73void drawObject() { 74 pushMatrix(); 75 translate(960,1000); // moves the starting coordinats to new location 76 strokeWeight(9); 77 stroke(255,10,10); // red color 78 pixsDistance = iDistance*22.5; // covers the distance from the sensor from cm to pixels 79 // limiting the range to 40 cms 80 if(iDistance<40){ 81 // draws the object according to the angle and the distance 82 line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),950*cos(radians(iAngle)),-950*sin(radians(iAngle))); 83 } 84 popMatrix(); 85} 86void drawLine() { 87 pushMatrix(); 88 strokeWeight(9); 89 stroke(30,250,60); 90 translate(960,1000); // moves the starting coordinats to new location 91 line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle))); // draws the line according to the angle 92 popMatrix(); 93} 94void drawText() { // draws the texts on the screen 95 96 pushMatrix(); 97 if(iDistance>40) { 98 noObject = "Out of Range"; 99 } 100 else { 101 noObject = "In Range"; 102 } 103 fill(0,0,0); 104 noStroke(); 105 rect(0, 1010, width, 1080); 106 fill(98,245,31); 107 textSize(25); 108 text("10cm",1180,990); 109 text("20cm",1380,990); 110 text("30cm",1580,990); 111 text("40cm",1780,990); 112 textSize(40); 113 text("Object: " + noObject, 240, 1050); 114 text("Angle: " + iAngle +" °", 1050, 1050); 115 text("Distance: ", 1380, 1050); 116 if(iDistance<40) { 117 text(" " + iDistance +" cm", 1400, 1050); 118 } 119 textSize(25); 120 fill(98,245,60); 121 translate(961+960*cos(radians(30)),982-960*sin(radians(30))); 122 rotate(-radians(-60)); 123 text("30°",0,0); 124 resetMatrix(); 125 translate(954+960*cos(radians(60)),984-960*sin(radians(60))); 126 rotate(-radians(-30)); 127 text("60°",0,0); 128 resetMatrix(); 129 translate(945+960*cos(radians(90)),990-960*sin(radians(90))); 130 rotate(radians(0)); 131 text("90°",0,0); 132 resetMatrix(); 133 translate(935+960*cos(radians(120)),1003-960*sin(radians(120))); 134 rotate(radians(-30)); 135 text("120°",0,0); 136 resetMatrix(); 137 translate(940+960*cos(radians(150)),1018-960*sin(radians(150))); 138 rotate(radians(-60)); 139 text("150°",0,0); 140 popMatrix(); 141}
arduino code for arduino ide
c_cpp
1// Includes the Servo library 2#include <Servo.h>. 3// Defines Tirg and Echo pins of the Ultrasonic Sensor 4const int trigPin = 10; 5const int echoPin = 11; 6// Variables for the duration and the distance 7long duration; 8int distance; 9Servo myServo; // Creates a servo object for controlling the servo motor 10void setup() { 11 pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output 12 pinMode(echoPin, INPUT); // Sets the echoPin as an Input 13 Serial.begin(9600); 14 myServo.attach(12); // Defines on which pin is the servo motor attached 15} 16void loop() { 17 // rotates the servo motor from 15 to 165 degrees 18 for(int i=15;i<=165;i++){ 19 myServo.write(i); 20 delay(30); 21 distance = calculateDistance();// Calls a function for calculating the distance measured by the Ultrasonic sensor for each degree 22 23 Serial.print(i); // Sends the current degree into the Serial Port 24 Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing 25 Serial.print(distance); // Sends the distance value into the Serial Port 26 Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing 27 } 28 // Repeats the previous lines from 165 to 15 degrees 29 for(int i=165;i>15;i--){ 30 myServo.write(i); 31 delay(30); 32 distance = calculateDistance(); 33 Serial.print(i); 34 Serial.print(","); 35 Serial.print(distance); 36 Serial.print("."); 37 } 38} 39// Function for calculating the distance measured by the Ultrasonic sensor 40int calculateDistance(){ 41 42 digitalWrite(trigPin, LOW); 43 delayMicroseconds(2); 44 // Sets the trigPin on HIGH state for 10 micro seconds 45 digitalWrite(trigPin, HIGH); 46 delayMicroseconds(10); 47 digitalWrite(trigPin, LOW); 48 duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds 49 distance= duration*0.034/2; 50 return distance; 51}
arduino code for arduino ide
c_cpp
1// Includes the Servo library 2#include <Servo.h>. 3// Defines Tirg and Echo pins of the Ultrasonic Sensor 4const int trigPin = 10; 5const int echoPin = 11; 6// Variables for the duration and the distance 7long duration; 8int distance; 9Servo myServo; // Creates a servo object for controlling the servo motor 10void setup() { 11 pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output 12 pinMode(echoPin, INPUT); // Sets the echoPin as an Input 13 Serial.begin(9600); 14 myServo.attach(12); // Defines on which pin is the servo motor attached 15} 16void loop() { 17 // rotates the servo motor from 15 to 165 degrees 18 for(int i=15;i<=165;i++){ 19 myServo.write(i); 20 delay(30); 21 distance = calculateDistance();// Calls a function for calculating the distance measured by the Ultrasonic sensor for each degree 22 23 Serial.print(i); // Sends the current degree into the Serial Port 24 Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing 25 Serial.print(distance); // Sends the distance value into the Serial Port 26 Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing 27 } 28 // Repeats the previous lines from 165 to 15 degrees 29 for(int i=165;i>15;i--){ 30 myServo.write(i); 31 delay(30); 32 distance = calculateDistance(); 33 Serial.print(i); 34 Serial.print(","); 35 Serial.print(distance); 36 Serial.print("."); 37 } 38} 39// Function for calculating the distance measured by the Ultrasonic sensor 40int calculateDistance(){ 41 42 digitalWrite(trigPin, LOW); 43 delayMicroseconds(2); 44 // Sets the trigPin on HIGH state for 10 micro seconds 45 digitalWrite(trigPin, HIGH); 46 delayMicroseconds(10); 47 digitalWrite(trigPin, LOW); 48 duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds 49 distance= duration*0.034/2; 50 return distance; 51}
Downloadable files
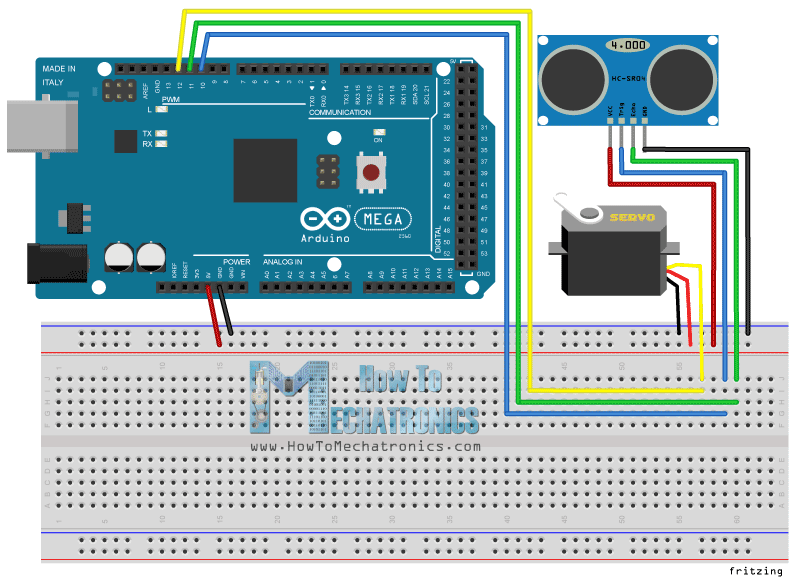
circuit
this is the circuit diagram for the project
circuit
circuit
this is the circuit diagram for the project
circuit
Comments
Only logged in users can leave comments