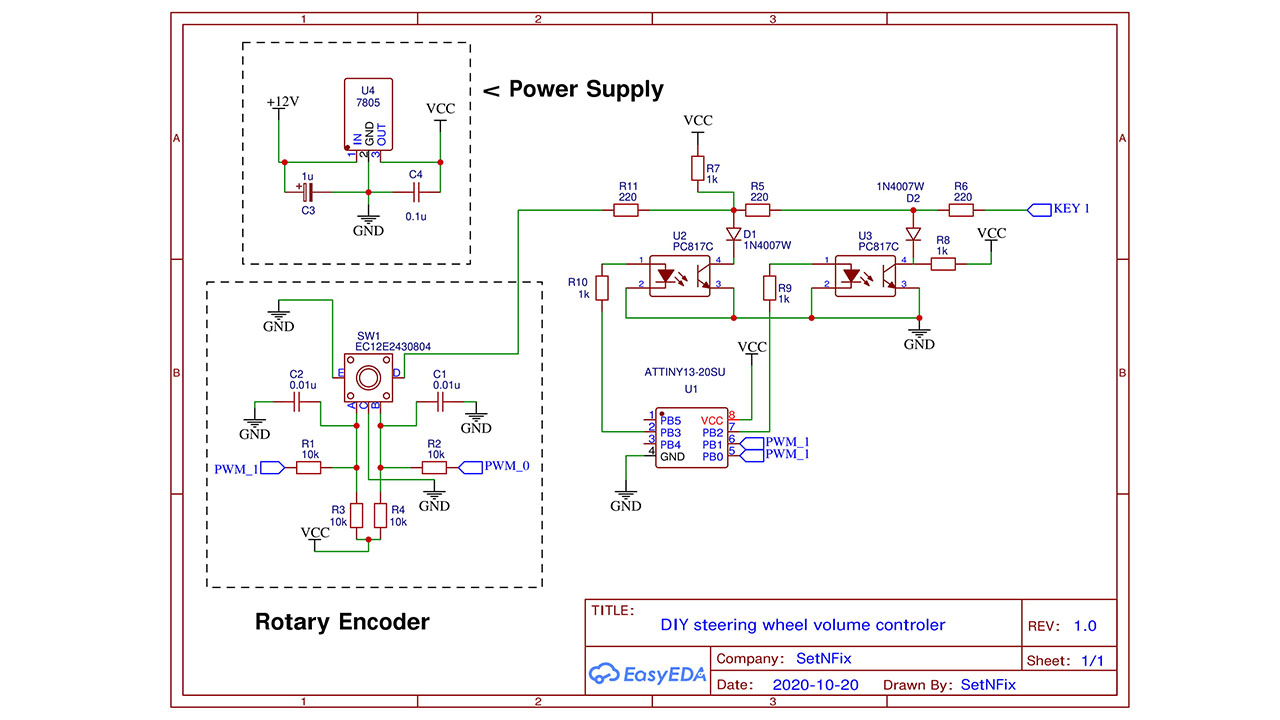
DIY car steering wheel controller with volume control
Control head unit of the using your own switch
Devices & Components
1
Arduino Uno Rev3
1
Resistor 10k ohm
1
Test Probe Connector, Multimeter
Hardware & Tools
1
Solder Wire, Lead Free
1
Soldering iron (generic)
Project description
Code
Code
arduino
1 /* Read Quadrature Encoder 2 * Connect Encoder to Pins encoder0PinA, encoder0PinB, and +5V. 3 * 4 * www.setnfix.com 5 * 6 * 7 */ 8 9 10 int val; 11 int encoder0PinA = 0; 12 int encoder0PinB = 1; 13 int test = A2; 14 int testdata=0; 15 int volP = A3; // Volume control + 16 int volM = A1;// Volume control - 17 int encoder0Pos = 0; 18 int encoder0PinALast = LOW; 19 int n = LOW; 20// int BOOT = 3; //boot up set 21// int ampoff = 11; 22/// int AMP=2; 23 //int POWER = 5; 24 25 // Variables will change : 26//int ledState = LOW; // ledState used to set the LED 27 28// Generally, you should use "unsigned long" for variables that hold time 29// The value will quickly become too large for an int to store 30unsigned long previousMillis = 0; // will store last time LED was updated 31 32// constants won't change : 33const long interval = 1800000; // interval at which to blink (milliseconds) 34 35 void setup() { 36 pinMode (encoder0PinA,INPUT); 37 pinMode (encoder0PinB,INPUT); 38 pinMode (test,INPUT); 39 //pinMode (BOOT,OUTPUT); 40 pinMode (volP,OUTPUT); 41 pinMode (volM,OUTPUT); 42 } 43 44 void loop() { 45 46 47 48testdata = analogRead(test); 49 50 51 n = digitalRead(encoder0PinA); 52 if ((encoder0PinALast == LOW) && (n == HIGH)) { 53 if (digitalRead(encoder0PinB) == LOW) { 54 VolumeUP(); 55 //delay(200); 56 } else { 57 VolumeDOWN(); 58 //delay(200); 59 } 60 //Serial.print (encoder0Pos); 61 // Serial.print ("/"); 62 } 63 encoder0PinALast = n; 64 65 66 //POWERON/OFF switch 67 68 unsigned long currentMillis = millis(); 69 70 if (currentMillis - previousMillis >= interval) { 71 // save the last time you blinked the LED 72 previousMillis = currentMillis; 73 74 // set the LED with the ledState of the variable: 75 //digitalWrite(POWER, ledState); 76 } 77 78 79 80 } 81 82 void VolumeUP(){ 83 digitalWrite(volP,HIGH); 84 delay(500); 85 digitalWrite(volP,LOW); 86 } 87 88 void VolumeDOWN(){ 89 digitalWrite(volM,HIGH); 90 delay(500); 91 digitalWrite(volM,LOW); 92 } 93
Code
arduino
1 /* Read Quadrature Encoder 2 * Connect Encoder to Pins encoder0PinA, encoder0PinB, and +5V. 3 * 4 * www.setnfix.com 5 * 6 * 7 */ 8 9 10 int val; 11 int encoder0PinA = 0; 12 int encoder0PinB = 1; 13 int test = A2; 14 int testdata=0; 15 int volP = A3; // Volume control + 16 int volM = A1;// Volume control - 17 int encoder0Pos = 0; 18 int encoder0PinALast = LOW; 19 int n = LOW; 20// int BOOT = 3; //boot up set 21// int ampoff = 11; 22/// int AMP=2; 23 //int POWER = 5; 24 25 // Variables will change : 26//int ledState = LOW; // ledState used to set the LED 27 28// Generally, you should use "unsigned long" for variables that hold time 29// The value will quickly become too large for an int to store 30unsigned long previousMillis = 0; // will store last time LED was updated 31 32// constants won't change : 33const long interval = 1800000; // interval at which to blink (milliseconds) 34 35 void setup() { 36 pinMode (encoder0PinA,INPUT); 37 pinMode (encoder0PinB,INPUT); 38 pinMode (test,INPUT); 39 //pinMode (BOOT,OUTPUT); 40 pinMode (volP,OUTPUT); 41 pinMode (volM,OUTPUT); 42 } 43 44 void loop() { 45 46 47 48testdata = analogRead(test); 49 50 51 n = digitalRead(encoder0PinA); 52 if ((encoder0PinALast == LOW) && (n == HIGH)) { 53 if (digitalRead(encoder0PinB) == LOW) { 54 VolumeUP(); 55 //delay(200); 56 } else { 57 VolumeDOWN(); 58 //delay(200); 59 } 60 //Serial.print (encoder0Pos); 61 // Serial.print ("/"); 62 } 63 encoder0PinALast = n; 64 65 66 //POWERON/OFF switch 67 68 unsigned long currentMillis = millis(); 69 70 if (currentMillis - previousMillis >= interval) { 71 // save the last time you blinked the LED 72 previousMillis = currentMillis; 73 74 // set the LED with the ledState of the variable: 75 //digitalWrite(POWER, ledState); 76 } 77 78 79 80 } 81 82 void VolumeUP(){ 83 digitalWrite(volP,HIGH); 84 delay(500); 85 digitalWrite(volP,LOW); 86 } 87 88 void VolumeDOWN(){ 89 digitalWrite(volM,HIGH); 90 delay(500); 91 digitalWrite(volM,LOW); 92 } 93
Downloadable files
Circuit
Progamming Attiny13
Circuit
Comments
Only logged in users can leave comments