Car Steering Wheel Control Unit with Arduino
Car Steering Wheel Control Unit with Arduino with two rotary encoders.
Devices & Components
Arduino Uno Rev3
ATmega328PB microcontroller
Capacitor 100 nF
Capacitor 22 pF
16 MHz Crystal
Multi-Turn Precision Potentiometer- 10k ohms (25 Turn)
Through Hole Resistor, 27 kohm
Capacitor 10 µF
1N4007 – High Voltage, High Current Rated Diode
Resistor 1k ohm
Linear Regulator (7805)
Resistor 10k ohm
Hardware & Tools
Soldering iron (generic)
PCB Holder, Soldering Iron
10 Pc. Jumper Wire Kit, 5 cm Long
Solder Wire, Lead Free
Desoldering Pump, Deluxe SOLDAPULLT®
Project description
Code
Car Steering Wheel Control Unit with Arduino : Code
arduino
This is the code to upload the arduino project
1/*this car steering wheel audio control buttons is programmed as universal circuit. 2 * This can be used to Volume up and down and, to back and next button. The both rotary encoder 3 * swiches are recommended for that purposes. and also more 2 switches are with the rotary encoders. 4 * 5 * Programmed by : BMIAK Basnayaka 6 * for SetNFix Youtube channel 7 * web : http://www.setnfix.com 8 * date : 08.06.2021 9 * Video Link https://youtu.be/m4KO8INEGUo 10 */ 11 12 13 14 15 16//Volume Controler 17int testPin=A0; 18int volOne = A2; 19int volTwo = A1; 20 int directionV=0; 21 int counterV = 0; 22 int currentStateCLKV; 23 int previousStateCLKV; 24 25//Next and previous Button 26#define nextOne A4 27#define nextTwo A3 28 int counterN = 0; 29 int currentStateCLKN; 30 int previousStateCLKN; 31 32int progSwitch = A5; 33int progData=0; 34 35int volUp = 12; 36int volDown = 11; 37int back = 10; 38int next = 9; 39 40int delayMe =0; // Time need to click a button to activate 1000 = 1 second 41int delayBtn = 2000; // Time need to click a button to prgramme the buttons 1000 = 1 second 42 43 44 45void setup() { 46 // put your setup code here, to run once: 47Serial.begin(9600); 48 49pinMode(volOne,INPUT); 50pinMode(volTwo, INPUT); 51pinMode(nextOne,INPUT); 52pinMode(nextTwo,INPUT); 53pinMode(progSwitch,INPUT); 54pinMode(volUp,OUTPUT); 55pinMode(volDown,OUTPUT); 56pinMode(back,OUTPUT); 57pinMode(next,OUTPUT); 58pinMode(testPin,OUTPUT); 59 60 previousStateCLKV = digitalRead(volOne); 61 previousStateCLKN = digitalRead(nextOne); 62} 63 64void loop() { 65 66 67progData = analogRead(progSwitch); 68delayMe = map(progData,0,1023,200,2000); 69 70//Serial.println(delayMe); 71volumeControler(); 72nextPrevious(); 73 74 75 76 77 78// 79//delay(1000); 80 81} 82 83 84void volumeControler(){ 85 //Volume Controler 86// Read the current state of inputCLK 87currentStateCLKV = digitalRead(volOne); 88 89//Serial.println(currentStateCLKV); 90 91 // If the previous and the current state of the inputCLK are different then a pulse has occured 92 if ((currentStateCLKV == LOW)&&(previousStateCLKV==HIGH)){ 93 94//Serial.println(currentStateCLKV); 95 // If the inputDT state is different than the inputCLK state then 96 // the encoder is rotating counterclockwise 97 if (digitalRead(volTwo)==LOW) { 98 99 digitalWrite(volDown,HIGH); 100 analogWrite(testPin,10); 101 Serial.println("DOWN"); 102 delay(delayMe); 103 digitalWrite(volDown,LOW); 104 analogWrite(testPin,0); 105 //previousStateCLKV = currentStateCLKV; 106 107 } else { 108 109 // Encoder is rotating clockwise 110 digitalWrite(volUp,HIGH); 111 analogWrite(testPin,20); 112 Serial.println("UP"); 113 delay(delayMe); 114 digitalWrite(volUp,LOW); 115 analogWrite(testPin,0); 116 // previousStateCLKV = currentStateCLKV; 117 } 118//Serial.println(counterV); 119 } 120 // Update previousStateCLK with the current state 121 previousStateCLKV = currentStateCLKV; 122 123 124/*if (directionV == 1){ 125digitalWrite(volDown,HIGH); 126Serial.println("DOWN"); 127delay(delayMe); 128digitalWrite(volDown,LOW);directionV =0;} 129 130if (directionV == 2){ 131digitalWrite(volUp,HIGH); 132Serial.println("UP"); 133delay(delayMe); 134digitalWrite(volUp,LOW);directionV =0;} 135*/ 136 137 138 139} 140 141void nextPrevious(){ 142 143// Read the current state of inputCLK 144 currentStateCLKN = digitalRead(nextOne); 145 146 // If the previous and the current state of the inputCLK are different then a pulse has occured 147 if ((currentStateCLKN==LOW) && (previousStateCLKN==HIGH)){ 148 149 // If the inputDT state is different than the inputCLK state then 150 // the encoder is rotating counterclockwise 151 if (digitalRead(nextTwo) ==LOW) { 152 counterN --; 153 digitalWrite(next,HIGH); 154 analogWrite(testPin,30); 155 Serial.println("BACK"); 156 delay(delayMe); 157 analogWrite(testPin,0); 158 digitalWrite(next,LOW); 159 160 161 } else { 162 // Encoder is rotating clockwise 163 counterN ++; 164 digitalWrite(back,HIGH); 165 Serial.println("NEXT"); 166 analogWrite(testPin,40); 167 delay(delayMe); 168 digitalWrite(back,LOW); 169 analogWrite(testPin,0); 170 171 } 172 173 } 174 // Update previousStateCLK with the current state 175 previousStateCLKN = currentStateCLKN; 176 }
Car Steering Wheel Control Unit with Arduino : Code
arduino
This is the code to upload the arduino project
1/*this car steering wheel audio control buttons is programmed as universal 2 circuit. 3 * This can be used to Volume up and down and, to back and next button. 4 The both rotary encoder 5 * swiches are recommended for that purposes. and also 6 more 2 switches are with the rotary encoders. 7 * 8 * Programmed by : BMIAK 9 Basnayaka 10 * for SetNFix Youtube channel 11 * web : http://www.setnfix.com 12 13 * date : 08.06.2021 14 * Video Link https://youtu.be/m4KO8INEGUo 15 */ 16 17 18 19 20 21//Volume 22 Controler 23int testPin=A0; 24int volOne = A2; 25int volTwo = A1; 26 int directionV=0; 27 28 int counterV = 0; 29 int currentStateCLKV; 30 int previousStateCLKV; 31 32//Next 33 and previous Button 34#define nextOne A4 35#define nextTwo A3 36 int counterN 37 = 0; 38 int currentStateCLKN; 39 int previousStateCLKN; 40 41int progSwitch 42 = A5; 43int progData=0; 44 45int volUp = 12; 46int volDown = 11; 47int back 48 = 10; 49int next = 9; 50 51int delayMe =0; // Time need to click a button to 52 activate 1000 = 1 second 53int delayBtn = 2000; // Time need to click a button 54 to prgramme the buttons 1000 = 1 second 55 56 57 58void setup() { 59 // put 60 your setup code here, to run once: 61Serial.begin(9600); 62 63pinMode(volOne,INPUT); 64pinMode(volTwo, 65 INPUT); 66pinMode(nextOne,INPUT); 67pinMode(nextTwo,INPUT); 68pinMode(progSwitch,INPUT); 69pinMode(volUp,OUTPUT); 70pinMode(volDown,OUTPUT); 71pinMode(back,OUTPUT); 72pinMode(next,OUTPUT); 73pinMode(testPin,OUTPUT); 74 75 76 previousStateCLKV = digitalRead(volOne); 77 previousStateCLKN = digitalRead(nextOne); 78} 79 80void 81 loop() { 82 83 84progData = analogRead(progSwitch); 85delayMe = map(progData,0,1023,200,2000); 86 87//Serial.println(delayMe); 88volumeControler(); 89nextPrevious(); 90 91 92 93 94 95// 96//delay(1000); 97 98} 99 100 101 102void volumeControler(){ 103 //Volume Controler 104// Read the current state 105 of inputCLK 106currentStateCLKV = digitalRead(volOne); 107 108//Serial.println(currentStateCLKV); 109 110 111 // If the previous and the current state of the inputCLK are different then a 112 pulse has occured 113 if ((currentStateCLKV == LOW)&&(previousStateCLKV==HIGH)){ 114 115 116//Serial.println(currentStateCLKV); 117 // If the inputDT state 118 is different than the inputCLK state then 119 // the encoder is rotating counterclockwise 120 121 if (digitalRead(volTwo)==LOW) { 122 123 digitalWrite(volDown,HIGH); 124 125 analogWrite(testPin,10); 126 Serial.println("DOWN"); 127 delay(delayMe); 128 129 digitalWrite(volDown,LOW); 130 analogWrite(testPin,0); 131 //previousStateCLKV 132 = currentStateCLKV; 133 134 } else { 135 136 // Encoder 137 is rotating clockwise 138 digitalWrite(volUp,HIGH); 139 analogWrite(testPin,20); 140 141 Serial.println("UP"); 142 delay(delayMe); 143 digitalWrite(volUp,LOW); 144 145 analogWrite(testPin,0); 146 // previousStateCLKV = currentStateCLKV; 147 148 } 149//Serial.println(counterV); 150 } 151 // Update previousStateCLK 152 with the current state 153 previousStateCLKV = currentStateCLKV; 154 155 156/*if 157 (directionV == 1){ 158digitalWrite(volDown,HIGH); 159Serial.println("DOWN"); 160delay(delayMe); 161digitalWrite(volDown,LOW);directionV 162 =0;} 163 164if (directionV == 2){ 165digitalWrite(volUp,HIGH); 166Serial.println("UP"); 167delay(delayMe); 168digitalWrite(volUp,LOW);directionV 169 =0;} 170*/ 171 172 173 174} 175 176void nextPrevious(){ 177 178// Read the current 179 state of inputCLK 180 currentStateCLKN = digitalRead(nextOne); 181 182 // 183 If the previous and the current state of the inputCLK are different then a pulse 184 has occured 185 if ((currentStateCLKN==LOW) && (previousStateCLKN==HIGH)){ 186 187 188 // If the inputDT state is different than the inputCLK state then 189 190 // the encoder is rotating counterclockwise 191 if (digitalRead(nextTwo) 192 ==LOW) { 193 counterN --; 194 digitalWrite(next,HIGH); 195 analogWrite(testPin,30); 196 197 Serial.println("BACK"); 198 delay(delayMe); 199 analogWrite(testPin,0); 200 201 digitalWrite(next,LOW); 202 203 204 } else { 205 // 206 Encoder is rotating clockwise 207 counterN ++; 208 digitalWrite(back,HIGH); 209 210 Serial.println("NEXT"); 211 analogWrite(testPin,40); 212 delay(delayMe); 213 214 digitalWrite(back,LOW); 215 analogWrite(testPin,0); 216 217 218 } 219 220 } 221 // Update previousStateCLK with the current state 222 223 previousStateCLKN = currentStateCLKN; 224 }
Downloadable files
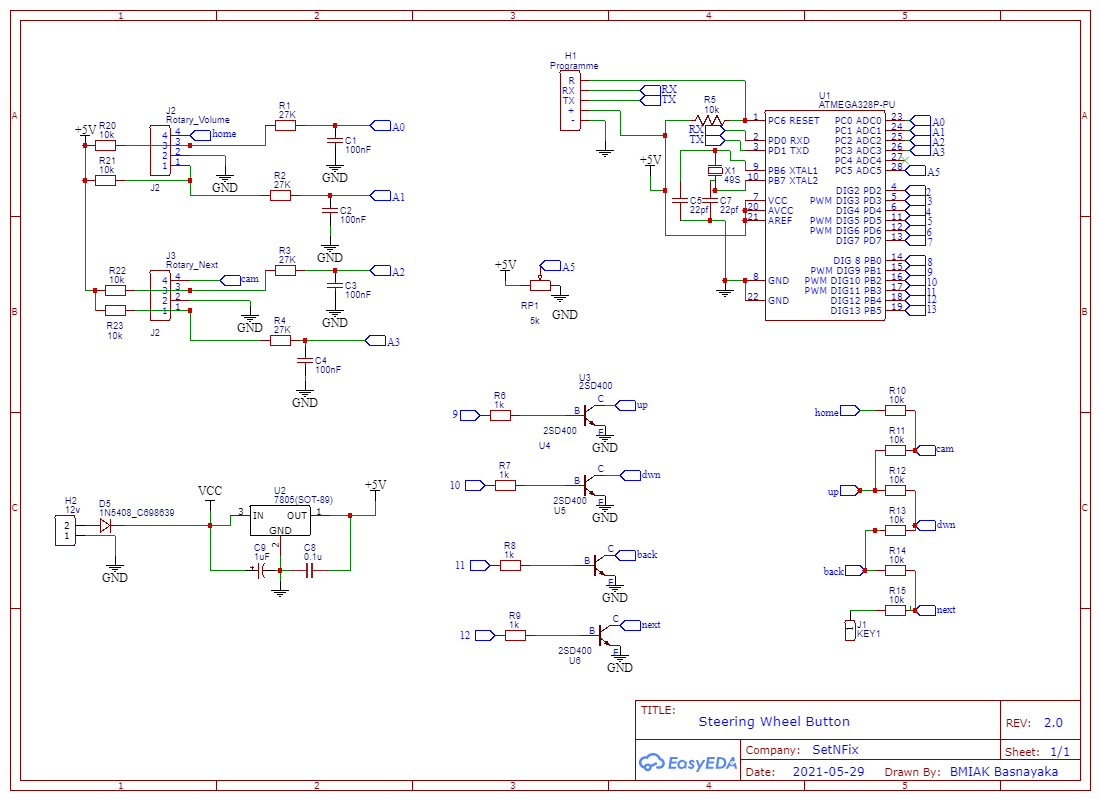
Car Steering Wheel Control Unit with Arduino : Circuit Diagram
You can use this circuit diagram to wire the project
Car Steering Wheel Control Unit with Arduino : Circuit Diagram
Comments
Only logged in users can leave comments