Components and supplies
1
Arduino Uno Rev3
2
Resistor 221 ohm
1
Buzzer
1
Jumper wires (generic)
1
SG90 Micro-servo motor
1
Breadboard (generic)
1
LED (generic)
Project description
Code
The code:
arduino
1#include <Servo.h> 2// create servo object to control a servo 3Servo myservo; 4// variable to store the servo position 5int pos = 0; 6// Define pins for ultrasonic, buzzer, led and relay 7int const trigPin = 10; 8int const echoPin = 9; 9int const buzzPin = 2; 10int const ledPin = 13; 11i 12void setup() 13{ 14 myservo.attach(11); 15 // attach servo on pin 11 16 pinMode(trigPin, OUTPUT); 17 // trig pin will have pulses output 18 pinMode(echoPin, INPUT); 19 // echo pin should be input to get pulse width 20 pinMode(buzzPin, OUTPUT); 21 // buzz pin is output to control buzzering 22 pinMode(ledPin, OUTPUT); 23 // led pin is output to glow light 24 25 26} 27void loop() 28{ 29 // Duration will be the input pulse width and distance will be the distance to the obstacle in centimeters 30 int duration, distance; 31 // Output pulse with 1ms width on trigPin 32 digitalWrite(trigPin, HIGH); 33 delay(1); 34 digitalWrite(trigPin, LOW); 35 // Measure the pulse input in echo pin 36 duration = pulseIn(echoPin, HIGH); 37 // Distance is half the duration devided by 29.1 (from datasheet) 38 distance = (duration / 2) / 29.1; 39 // if distance less than 0.15 meter and more than 0 (0 or less means over range) 40 if (distance <= 15 && distance >= 0) 41 { 42 // Buzz 43 digitalWrite(buzzPin, HIGH); 44 // Led on 45 digitalWrite(ledPin, HIGH); 46 47 48 { 49 myservo.write(0);// tell servo to go to position in variable 'pos' 50 delay(15);// servo 15ms to reach that position 51 } 52 } 53 else 54 { 55 // Don't buzz 56 digitalWrite(buzzPin, LOW); 57 // Led off 58 digitalWrite(ledPin, LOW); 59 60 { 61 myservo.write(90);// tell servo to go to position in variable 'pos' 62 delay(15);// servo 15ms to reach that position 63 } 64 } 65 // Waiting 60 ms won't hurt any one 66 delay(60); 67} 68
The code:
arduino
1#include <Servo.h> 2// create servo object to control a servo 3Servo 4 myservo; 5// variable to store the servo position 6int pos = 0; 7// Define 8 pins for ultrasonic, buzzer, led and relay 9int const trigPin = 10; 10int const 11 echoPin = 9; 12int const buzzPin = 2; 13int const ledPin = 13; 14i 15void setup() 16{ 17 18 myservo.attach(11); 19 // attach servo on pin 11 20 pinMode(trigPin, OUTPUT); 21 22 // trig pin will have pulses output 23 pinMode(echoPin, INPUT); 24 // echo 25 pin should be input to get pulse width 26 pinMode(buzzPin, OUTPUT); 27 // buzz 28 pin is output to control buzzering 29 pinMode(ledPin, OUTPUT); 30 // led pin 31 is output to glow light 32 33 34} 35void loop() 36{ 37 // Duration will 38 be the input pulse width and distance will be the distance to the obstacle in centimeters 39 40 int duration, distance; 41 // Output pulse with 1ms width on trigPin 42 digitalWrite(trigPin, 43 HIGH); 44 delay(1); 45 digitalWrite(trigPin, LOW); 46 // Measure the pulse 47 input in echo pin 48 duration = pulseIn(echoPin, HIGH); 49 // Distance is half 50 the duration devided by 29.1 (from datasheet) 51 distance = (duration / 2) / 29.1; 52 53 // if distance less than 0.15 meter and more than 0 (0 or less means over range) 54 55 if (distance <= 15 && distance >= 0) 56 { 57 // Buzz 58 digitalWrite(buzzPin, 59 HIGH); 60 // Led on 61 digitalWrite(ledPin, HIGH); 62 63 64 { 65 66 myservo.write(0);// tell servo to go to position in variable 'pos' 67 delay(15);// 68 servo 15ms to reach that position 69 } 70 } 71 else 72 { 73 // Don't 74 buzz 75 digitalWrite(buzzPin, LOW); 76 // Led off 77 digitalWrite(ledPin, 78 LOW); 79 80 { 81 myservo.write(90);// tell servo to go to position 82 in variable 'pos' 83 delay(15);// servo 15ms to reach that position 84 } 85 86 } 87 // Waiting 60 ms won't hurt any one 88 delay(60); 89} 90
Downloadable files
screenshot_(25)_PZi9RXqzbT.png
screenshot_(25)_PZi9RXqzbT.png
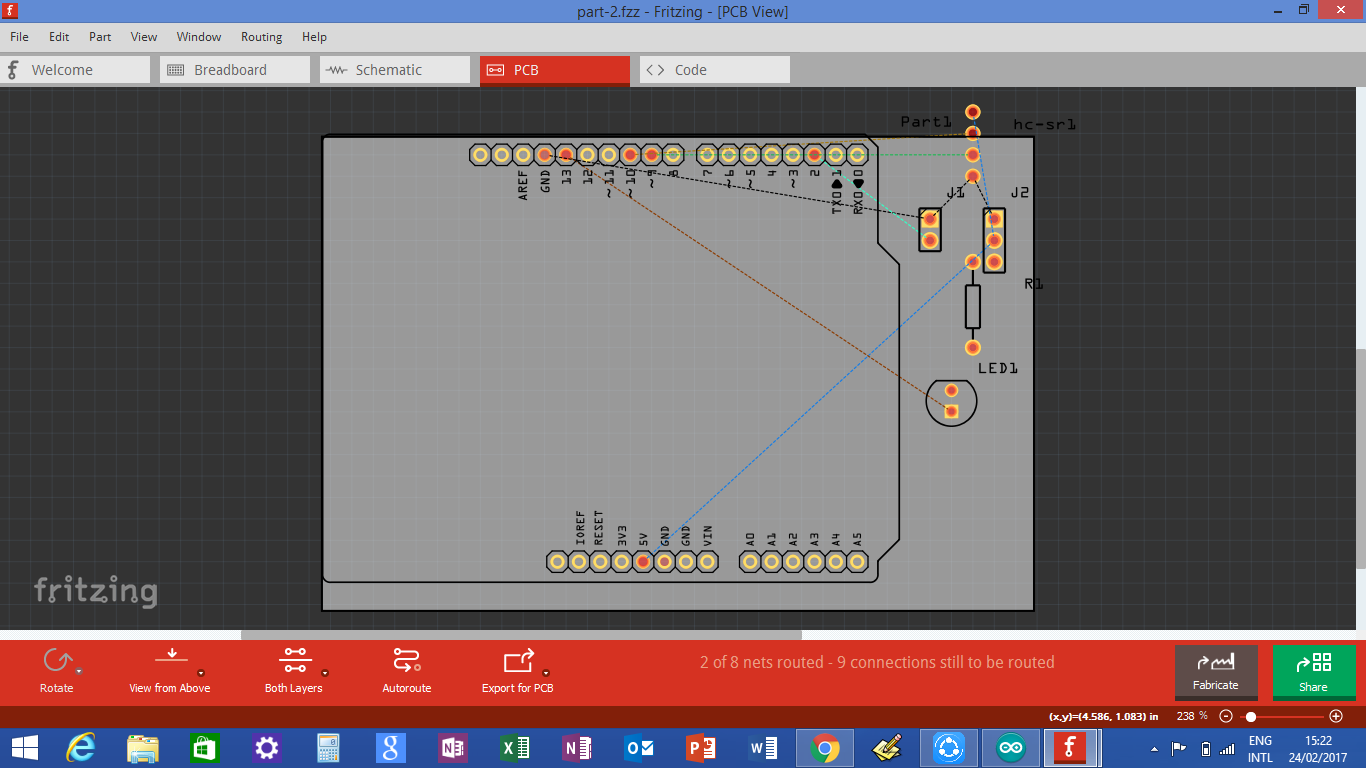
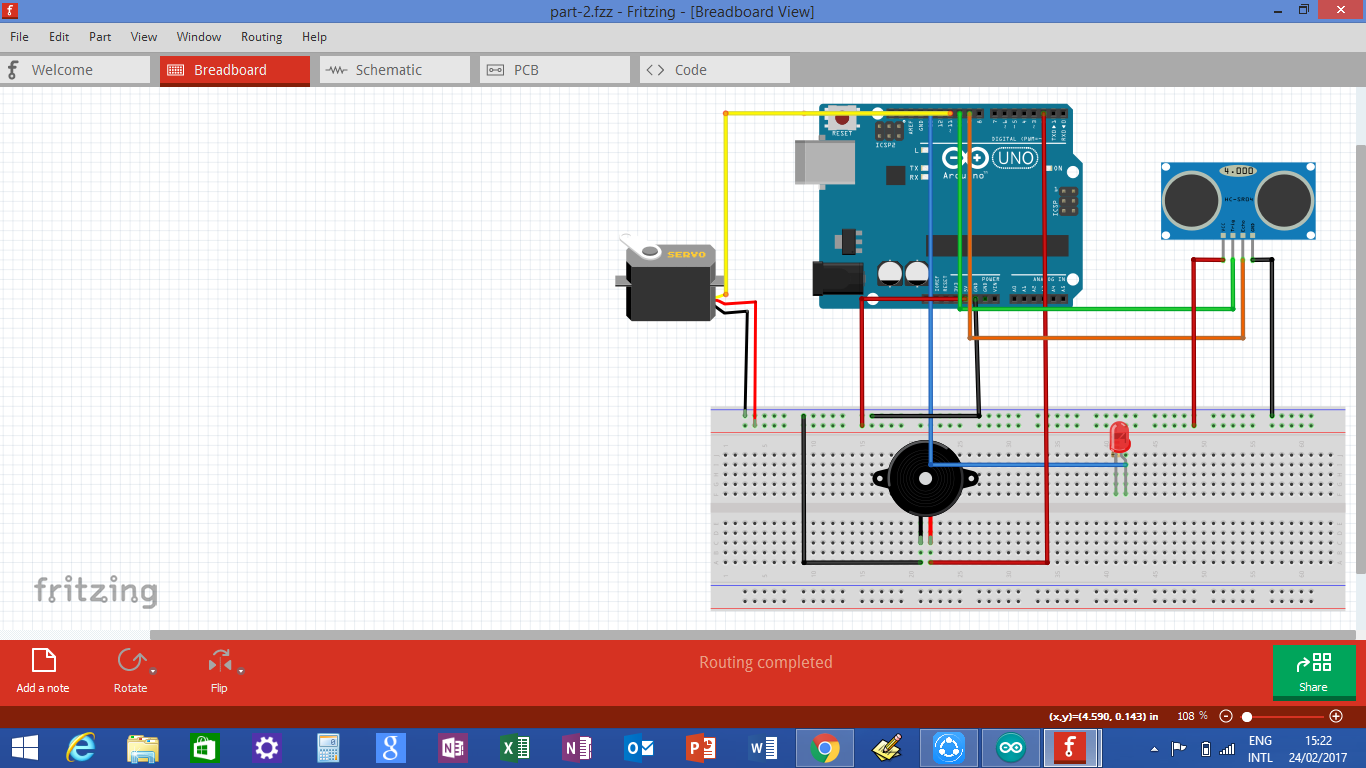
The circuit
The circuit
screenshot_(25)_PZi9RXqzbT.png
screenshot_(25)_PZi9RXqzbT.png
screenshot_(24)_1hq46ai1kk.png
screenshot_(24)_1hq46ai1kk.png

The circuit
The circuit
Comments
Only logged in users can leave comments