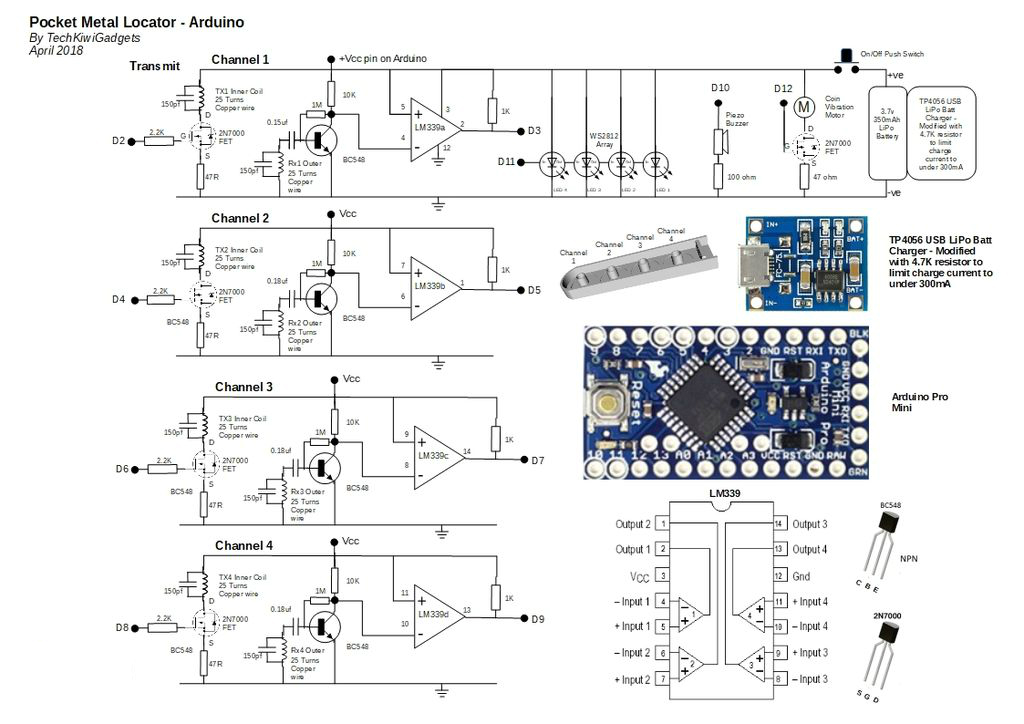
Pocket Metal Locator
Cool little Pocket Metal Locator sensitive enough to identify small nails and tacks in wood with four independent search coils and LEDs.
Components and supplies
Arduino Pro Mini 328 - 5V/16MHz
Tools and machines
3D Printer (generic)
Project description
Code
Pocket_Metal_Locator_V11.ino
c_cpp
This cool little Pocket Metal Locator is sensitive enough to identify small nails and tacks in wood and compact enough to fit into awkward spaces making it convenient to carry and use for metal locating. The unit has four independent search coils and color LED indicators making it easy to cover a larger search area quickly while being able to accurately identify the target. This neat little device is self-calibrating with one button operation, rechargeable through a USB port and uses color LEDs, sound and vibration to indicate target strength. Included in the instructable is all of the designs, testing, code and 3D files required to build on your own. I hope you enjoy building and using this as much as I have!!
1/* Pocket Metal Locator - Arduino Pro Mini April 2018 TechKiwiGradgets 2Version 11 - First Instructable Release 3 4*/ 5 6// WS2182 LED Driver Library Setup 7#include "FastLED.h" 8// How many leds in your strip? 9#define NUM_LEDS 4 // Note: First LED is address 0 10#define DATA_PIN 11 // Note: D11 used to control LED chain 11 12// Define the array of leds 13CRGB leds[NUM_LEDS]; 14 15// Smoothing Variables for LPF 16const float alpha = 0.85; 17float smoothedvalue1 = 1000; 18float smoothedvalue2 = 1000; 19float smoothedvalue3 = 1000; 20float smoothedvalue4 = 1000; 21 22int sthreshold = 100; // Minimum reading from pulseIn function ensure sampling above noise 23 24float ledthreshold1 = 0.93; // Percentage below baseline before setting LEDs Purple 25float ledthreshold2 = 0.96; // Percentage below baseline before setting LEDs Red 26float ledthreshold3 = 0.99; // Percentage below baseline before setting LEDs Green 27float ledthreshold4 = 0.998; // Percentage below baseline before setting LEDs Blue 28 29 30 31// Callibration Variables 32 33boolean sample = false; // if true then do not recallibrate thresholds 34int calcounter = 0; // Used to count the number of times a sample has been taken 35int scount = 200; // Number of reads before calibrating once only after power up 36int numsamples = 20; // Number of samples taken before averaging them 37int t1 = 100; // Duration in microseconds that LEDs on during callibration 38 39 40 41long calav1 = 0; // Used to calcuate average of ten samples 42long calav2 = 0; // Used to calcuate average of ten samples 43long calav3 = 0; // Used to calcuate average of ten samples 44long calav4 = 0; // Used to calcuate average of ten samples 45 46int div1 = 0;// Divisor counter for number of samples taken 47int div2 = 0; 48int div3 = 0; 49int div4 = 0; 50 51// Four Channels denoted by A,B,C,D 52 53int divA = 0; 54long tempA = 0; 55long pcounterA = 0; // Unfiltered Pulse Width of Channel 1 56 57int divB = 0; 58long tempB = 0; 59long pcounterB = 0; // Unfiltered Pulse Width of Channel 2 60 61int divC = 0; 62long tempC = 0; 63long pcounterC = 0; // Unfiltered Pulse Width of Channel 1 64 65int divD = 0; 66long tempD = 0; 67long pcounterD = 0; // Unfiltered Pulse Width of Channel 1 68 69int pwindow = 7500; // Maximum timeout value for pulsewidth 70 71// **************************************************** 72int dly1 = 4; // Period of time that TXR pin stays high (typicLLY 4uS) 73int dly2 = 1; // Delay after TXR pin goes LOW before reading starting to read the pulse duration - typically 1 uS 74int dly3 = 500; // Delay in Microseconds after sampling pulsewidth before starting next cycle 75 76// **************************************************** 77 78 79int threshdiff = 15; // Add to average to become specific threshold where LED will light (Changed V21 from 25 to 20) 80 81long pulseav = 0; // Stores value of output for calibration 82 83// Vibration Motor 84 boolean haptic = false; // Flag used to turn on vibration motor for a period of time 85 int vduration = 1; // Number of program cycles that vibration motor enabled 86 int vcounter = vduration; // v cycle counter 87 88 89void setup() { 90// Vibration Motor/Haptic Feedback 91 pinMode(12,OUTPUT); // Vibration Motor driver from Arduino - D10 92 digitalWrite(12,LOW); // Turn off motor 93 94 95 96 Serial.begin(115200); // Setupserial interface for test data outputs 97 98 99// WS2182 LED Driver Setup 100 LEDS.addLeds<WS2812,DATA_PIN,GRB>(leds,NUM_LEDS); // Default if RGB for this however may vary dependent on LED manufacturer 101 LEDS.setBrightness(5); //Set brightness of LEDs here 102 // limit my draw to 1A at 5v of power draw 103 FastLED.setMaxPowerInVoltsAndMilliamps(5,100); 104 105 FastLED.setDither(0); // Turns off Auto Dithering function to remove flicker 106 107 108// Arduino Mini Pro logical pin assignements 109// Logical Pin Name 2,3,4,5,6,7,8,9 Equates to D2-D9 Pin Name Printed On Board 110// Logical Pin Name 10,11,12,13,14,15,16,17 Equates to D10-D13, A0-A3 Pin Name Printed On Board 111 112// Piezo Buzzer 113 pinMode(10,OUTPUT); // Piezo Buzzer driver from Arduino - D10 114 115 116 117 118// Transmit 119 pinMode(2,OUTPUT); // Pulse output from Arduino - D2 120 pinMode(4,OUTPUT); // Pulse output from Arduino - D4 121 pinMode(6,OUTPUT); // Pulse output from Arduino - D6 122 pinMode(8,OUTPUT); // Pulse output from Arduino - D8 123 124// Channel A 125 pinMode(3,INPUT); // Signal input to Arduino from pin 2 on LM339 - D3 126 127// Channel B 128 pinMode(5,INPUT); // Signal input to Arduino from pin 1 on LM339 - D5 129 130// Channel C 131 pinMode(7,INPUT); // Signal input to Arduino from pin 14 on LM339 - D7 132 133// Channel D 134 pinMode(9,INPUT); // Signal input to Arduino from pin 13 on LM339 - D9 135 136 } 137 138void loop(){ 139 140// Pulse and read Coil --------------------------------------------- 141 142 143// Channel 1 (point of Wand) 144 145digitalWrite(2,HIGH); // Set the TX pin to high 146delayMicroseconds(dly1); // Delay before setting low on output pin 147digitalWrite(2,LOW); // Set TX pin to low 148delayMicroseconds(dly2); // Delay before sampling pulse width 149pcounterA = pulseIn(3,LOW,pwindow); 150digitalWrite(2,LOW); // Set the TX pin to LOW 151delayMicroseconds(dly3); // Delay before sampling pulse width 152 153 154// Apply Low Pass Filter to signal to smooth Channel 1 155 if (pcounterA >= sthreshold) { 156 smoothedvalue1 = (alpha * smoothedvalue1) + ( (1 - alpha) * pcounterA); 157 } 158 pcounterA = smoothedvalue1; 159 160 161// Channel 2 162 163digitalWrite(4,HIGH); // Set the TX pin to high 164delayMicroseconds(dly1); // Delay before setting low on output pin 165digitalWrite(4,LOW); // Set TX pin to low 166delayMicroseconds(dly2); // Delay before sampling pulse width 167pcounterB = pulseIn(5,LOW,pwindow); 168digitalWrite(4,LOW); // Set the TX pin to LOW 169delayMicroseconds(dly3); // Delay before sampling pulse width 170 171// Apply Low Pass Filter to signal to smooth Channel 2 172 if (pcounterB >= sthreshold) { 173 smoothedvalue2 = (alpha * smoothedvalue2) + ( (1 - alpha) * pcounterB); 174 } 175 pcounterB = smoothedvalue2; 176 177// Channel 3 178 179digitalWrite(6,HIGH); // Set the TX pin to high 180delayMicroseconds(dly1); // Delay before setting low on output pin 181digitalWrite(6,LOW); // Set TX pin to low 182delayMicroseconds(dly2); // Delay before sampling pulse width 183pcounterC = pulseIn(7,LOW,pwindow); 184digitalWrite(6,LOW); // Set the TX pin to LOW 185//delayMicroseconds(dly3); // Delay before sampling pulse width 186 187// Apply Low Pass Filter to signal to smooth Channel 3 188 if (pcounterC >= sthreshold) { 189 smoothedvalue3 = (alpha * smoothedvalue3) + ( (1 - alpha) * pcounterC); 190 } 191 pcounterC = smoothedvalue3; 192 193// Channel 4 194 195digitalWrite(8,HIGH); // Set the TX pin to high 196delayMicroseconds(dly1); // Delay before setting low on output pin 197digitalWrite(8,LOW); // Set TX pin to low 198delayMicroseconds(dly2); // Delay before sampling pulse width 199pcounterD = pulseIn(9,LOW,pwindow); 200digitalWrite(8,LOW); // Set the TX pin to LOW 201delayMicroseconds(dly3); // Delay before sampling pulse width 202 203// Apply Low Pass Filter to signal to smooth Channel 4 204 if (pcounterD >= sthreshold) { 205 smoothedvalue4 = (alpha * smoothedvalue4) + ( (1 - alpha) * pcounterD); 206 } 207 pcounterD = smoothedvalue4; 208 209 210 211// Print value then Reset the counter 212 213/* 214 215 Serial.print(pcounterA); 216 Serial.print(" "); 217 Serial.print(calav1); 218 Serial.print(" "); 219 Serial.print(pcounterB); 220 Serial.print(" "); 221 Serial.print(calav2); 222 Serial.print(" "); 223 Serial.print(pcounterC); 224 Serial.print(" "); 225 Serial.print(calav3); 226 Serial.print(" "); 227 Serial.print(pcounterD); 228 Serial.print(" "); 229 Serial.println(calav4); 230 231*/ 232 233 234// Callibation of Thresholds on Powerup 235 // Wait for a period of time to set baseline for each coil 236 237 if (sample == false){ 238 calcounter++; 239 } 240 241 if ( calcounter > (scount-numsamples) ) { // Wait for 90 then add up the samples to prepare to calculate the average 242 243 if (pcounterA > sthreshold) { 244 calav1 = calav1 + pcounterA; 245 div1++; 246 } 247 248 if (pcounterB > sthreshold) { 249 calav2 = calav2 + pcounterB; 250 div2++; 251 } 252 253 if (pcounterC > sthreshold) { 254 calav3 = calav3 + pcounterC; 255 div3++; 256 } 257 258 if (pcounterD > sthreshold) { 259 calav4 = calav4 + pcounterD; 260 div4++; 261 } 262 263 } 264 265 if ((calcounter > scount)&&(sample == false)){ 266 267 // Set the thresholds 268 269 calav1 = calav1/div1; 270 calav2 = calav2/div2; 271 calav3 = calav3/div3; 272 calav4 = calav4/div4; 273 274 // Flash LED to show calibrate done 275 276 // 0-3 Blue 277 leds[3] = CRGB::Blue; 278 FastLED.show(); 279 delay(t1); 280 leds[3] = CRGB::Black; 281 282 leds[2] = CRGB::Blue; 283 FastLED.show(); 284 delay(t1); 285 leds[2] = CRGB::Black; 286 287 leds[1] = CRGB::Blue; 288 FastLED.show(); 289 delay(t1); 290 leds[1] = CRGB::Black; 291 292 leds[0] = CRGB::Blue; 293 FastLED.show(); 294 delay(t1); 295 leds[0] = CRGB::Black; 296 297 // 3-0 Green 298 leds[3] = CRGB::Green; 299 FastLED.show(); 300 delay(t1); 301 leds[3] = CRGB::Black; 302 303 leds[2] = CRGB::Green; 304 FastLED.show(); 305 delay(t1); 306 leds[2] = CRGB::Black; 307 308 leds[1] = CRGB::Green; 309 FastLED.show(); 310 delay(t1); 311 leds[1] = CRGB::Black; 312 313 leds[0] = CRGB::Green; 314 FastLED.show(); 315 delay(t1); 316 leds[0] = CRGB::Black; 317 318 FastLED.show(); 319 320// Sound Buzzer 321 322 // digitalWrite(10,HIGH); // Set the output pin to high to activate the LED 323// delay(t1*2); 324 digitalWrite(10,LOW); // Set the output pin to high to activate the LED 325 326 // Reset the sample flag 327 sample = true; 328 calcounter = 0; 329 } 330 331 if (sample == true) { 332 updateLEDs(); 333 } 334 335 336// Haptic Feedback - If threshold exceeded turn on vibration motor for "vduration" cycels 337 338 if(haptic == true) { // If flag set then turn on motor 339 digitalWrite(12,HIGH); // Set the output pin to high to activate the Vibrate Motor 340 341 if (vcounter >= 1){ 342 vcounter--; // decrement counter 343 }else{ 344 digitalWrite(12,LOW); // Set the output pin to LOW to deactivate the Vibrate Motor 345 haptic = false; // Reset vibration flag after number of cycles 346 vcounter = vduration; // Reset vibration counter 347 } 348 349 } 350 351} 352 353 354// Subroutines 355 356void updateLEDs() { 357 358// Display results 359// Purple - Strongest target signal + (Beep Piezo and Haptic Feedback) 360// Red - High +(Haptic Feedback) 361// Green - Moderate +(Haptic Feedback) 362// Blue - Weakest target signal 363 364 365 366// Turn off all LEDs 367leds[0] = CRGB::Black; 368leds[1] = CRGB::Black; 369leds[2] = CRGB::Black; 370leds[3] = CRGB::Black; 371 372digitalWrite(10,LOW); // Set the output pin to LOW to deactivate the Piezo Speaker 373digitalWrite(12,LOW); // Set the output pin to LOW to deactivate Vibrating Motor 374 375 376// *************** Channel 1 377 378 379if (pcounterA < (calav1*(ledthreshold1))) { // Display Purple if strong target 380 381 leds[3] = CRGB::Purple; 382 digitalWrite(10,HIGH); // Set the output pin to high to activate the Piezo Speaker 383 haptic = true; 384 } else 385 386if (pcounterA < (calav1*(ledthreshold2))) { // Display Blue for moderate strength target 387 388 leds[3] = CRGB::Red; 389 haptic = true; 390 } else 391 392if (pcounterA < (calav1*(ledthreshold3))) { // Display Blue for moderate strength target 393 394 leds[3] = CRGB::Green; 395 haptic = true; 396 } else 397 398if (pcounterA < (calav1*(ledthreshold4))) { // Add additional percentage point to threshold due to sensitivity of channel 1 399 400 leds[3] = CRGB::Blue; 401 402 } 403 404// Channel 2 Display 405 406 407if ((pcounterB < calav2*ledthreshold1 )) { // Display Green if strong target 408 409 leds[2] = CRGB::Purple; 410 digitalWrite(10,HIGH); // Set the output pin to high to activate the Piezo Speaker 411 haptic = true; 412 413 } else 414 415if ((pcounterB < calav2*ledthreshold2 )) { // Display Blue for moderate strength target 416 417 leds[2] = CRGB::Red; 418 haptic = true; 419 } else 420 421if ((pcounterB < calav2*ledthreshold3 )) { // Display Blue for moderate strength target 422 423 leds[2] = CRGB::Green; 424 haptic = true; 425 } else 426 427if ((pcounterB < calav2*ledthreshold4 )) { // Display Blue for moderate strength target 428 429 leds[2] = CRGB::Blue; 430 431 } 432 433// Channel 3 Display 434 435 436if ((pcounterC < calav3*ledthreshold1 )) { // Display Green if strong target 437 438 leds[1] = CRGB::Purple; 439 digitalWrite(10,HIGH); // Set the output pin to high to activate the Piezo Speaker 440 haptic = true; 441 442 } else 443 444if ((pcounterC < calav3*ledthreshold2 )) { // Display Blue for moderate strength target 445 446 leds[1] = CRGB::Red; 447 haptic = true; 448 } else 449 450if ((pcounterC < calav3*ledthreshold3 )) { // Display Blue for moderate strength target 451 452 leds[1] = CRGB::Green; 453 haptic = true; 454 } else 455 456if ((pcounterC < calav3*ledthreshold4 )) { // Display Blue for moderate strength target 457 458 leds[1] = CRGB::Blue; 459 460 } 461 462// Channel 4 Display 463 464 465if ((pcounterD < calav4*ledthreshold1 )) { // Display Green if strong target 466 467 leds[0] = CRGB::Purple; 468 digitalWrite(10,HIGH); // Set the output pin to high to activate the Piezo Speaker 469 haptic = true; 470 471 } else 472 473if ((pcounterD < calav4*ledthreshold2 )) { // Display Blue for moderate strength target 474 475 leds[0] = CRGB::Red; 476 haptic = true; 477 } else 478 479if ((pcounterD < calav4*ledthreshold3 )) { // Display Blue for moderate strength target 480 481 leds[0] = CRGB::Green; 482 haptic = true; 483 } else 484 485if ((pcounterD < calav4*ledthreshold4 )) { // Display Blue for moderate strength target 486 487 leds[0] = CRGB::Blue; 488 489 } 490 491 492 493 FastLED.show(); 494} 495 496 497
Downloadable files
Pocket Metal Locator
This cool little Pocket Metal Locator is sensitive enough to identify small nails and tacks in wood and compact enough to fit into awkward spaces making it convenient to carry and use for metal locating. The unit has four independent search coils and color LED indicators making it easy to cover a larger search area quickly while being able to accurately identify the target.
Pocket Metal Locator
Documentation
Thingiverse
This cool little Pocket Metal Locator is sensitive enough to identify small nails and tacks in wood and compact enough to fit into awkward spaces making it convenient to carry and use for metal locating. The unit has four independent search coils and color LED indicators making it easy to cover a larger search area quickly while being able to accurately identify the target. This neat little device is self-calibrating with one button operation, rechargeable through a USB port and uses color LEDs, sound and vibration to indicate target strength. Included in the instructable is all of the designs, testing, code and 3D files required to build on your own. I hope you enjoy building and using this as much as I have!!
https://www.thingiverse.com/thing:2887074
Comments
Only logged in users can leave comments