Gps bike computer
Nice
Devices & Components
1
Arduino Nano
1
Jumper wires (generic)
1
Nokia 5110 display
1
Neo 6m Gps
Hardware & Tools
1
Solder Flux, Soldering
1
Soldering iron (generic)
Software & Tools
1
Tinycad
Arduino IDE
Project description
Code
Code
c_cpp
1/* 2 3-----------Bike comuter----------- 4----by Trybulski Mikolaj---------- 5*/ 6 7//gps 8 libaries 9#include <TinyGPS++.h> 10#include <SoftwareSerial.h> 11 12//lcd libaries 13#include 14 <SPI.h> 15#include <Adafruit_GFX.h> 16#include <Adafruit_PCD8544.h> 17 18//variables 19 used for distance calculations 20float latold; 21float longold; 22float wholedistance; 23 24// 25 The TinyGPS++ object 26TinyGPSPlus gps; 27 28// The serial connection to the 29 GPS device 30SoftwareSerial ss(7, 6); //tx (on gps) - 7, rx (on gps) - 6 31 32//lcd 33 settin 34 35//pinout 9 CLK , 10 DIN , 11 DC , 12 CE , 2 RST , 8 BL 36const 37 int clk = 9; 38const int din = 10; 39const int dc = 11; 40const int ce = 12; 41const 42 int rst = 2; 43const int bl = 8; //low - on, high - off 44 45Adafruit_PCD8544 46 display = Adafruit_PCD8544(clk, din, dc, ce, rst); 47 48 49 50void setup(){ 51 52 wholedistance = 0; 53 latold = 0; 54 longold = 0; 55 56 ss.begin(9600); 57 58 delay(300); 59 pinMode(bl, OUTPUT); 60 digitalWrite(bl, LOW); 61 display.begin(); 62 63 display.setContrast(60); 64 display.clearDisplay(); 65 66 display.setTextColor(BLACK); 67 68 display.setCursor(0,0); 69 display.setTextSize(1); 70 display.print("Bike computer 71 v1.0, made by Trybulski Mikolaj "); 72 display.display(); 73 delay(2000); 74 75 display.clearDisplay(); 76 display.setCursor(0,0); 77 display.setTextSize(2); 78 79 display.print("waitingfor gps... "); 80 display.display(); 81} 82 83void 84 loop(){ 85 display.clearDisplay(); 86 display.setTextColor(BLACK); 87 // 88 This sketch displays information every time a new sentence is correctly encoded. 89 90 while (ss.available() > 0){ 91 gps.encode(ss.read()); 92 93 94 if 95 (gps.location.isUpdated()){ 96 97 //dist calculations 98 if(latold == 0 || 99 longold == 0){//dont calculate using 0 coordinates (which are set for stary value) 100 101 latold = gps.location.lat();//update ealier position 102 longold = gps.location.lng(); 103 104 delay(300); 105 } 106 else{ 107 if(gps.location.lat() == latold || gps.location.lng() 108 == longold){ 109 delay(1000); 110 } 111 else{ 112 float distLat = abs(gps.location.lat() 113 - latold) * 111194.9; 114 float distLong = 111194.9 * abs(gps.location.lng() - 115 longold) * cos(radians((gps.location.lat() + latold) / 2)); 116 float distance 117 = sqrt(pow(distLat, 2) + pow(distLong, 2)); // equation form https://www.instructables.com/Distance-measuring-and-more-device-using-Arduino-a/ 118 119 latold = gps.location.lat();//update ealier position 120 longold = gps.location.lng(); 121 122 wholedistance = distance + wholedistance; // add newly calculated distance to 123 ealier one for trip distance 124 } 125 } 126 //dist display 127 display.setTextSize(1.5); 128 129 display.setCursor(0,25); 130 display.print(wholedistance / 1000); 131 display.println("km"); 132 133 134 int readvalue = gps.course.deg(); //define and round heading 135 int speedo 136 = gps.speed.kmph(); // define and round speed 137 138 display.setCursor(0,0); 139 140 display.setTextSize(3); 141 display.print(speedo); 142 display.setTextSize(1); 143 144 display.print("kph "); 145 display.setTextSize(2); 146 147 if (readvalue 148 >=338 || readvalue < 22){ 149 display.println("N"); 150 } 151 else if 152 (readvalue >= 22 && readvalue < 68) 153 { 154 display.println("NE"); 155 } 156 157 else if (readvalue >= 68 && readvalue < 113) 158 { 159 display.println("E"); 160 161 } 162 else if (readvalue >= 113 && readvalue < 158) 163 { 164 display.println("SE"); 165 166 } 167 else if (readvalue >= 158 && readvalue < 203) 168 { 169 display.println("S"); 170 171 } 172 else if (readvalue >= 203 && readvalue < 248) 173 { 174 display.println("SW"); 175 176 } 177 else if (readvalue >= 248 && readvalue < 293) 178 { 179 display.println("W"); 180 181 } 182 else if (readvalue >= 293 && readvalue < 338) 183 { 184 display.println("NW"); 185 186 } 187 188 display.display(); 189 delay(1000); //wait. we dont need to update 190 so many times 191 192 } 193 } 194} 195
Code
c_cpp
1/* 2 3-----------Bike comuter----------- 4----by Trybulski Mikolaj---------- 5*/ 6 7//gps libaries 8#include <TinyGPS++.h> 9#include <SoftwareSerial.h> 10 11//lcd libaries 12#include <SPI.h> 13#include <Adafruit_GFX.h> 14#include <Adafruit_PCD8544.h> 15 16//variables used for distance calculations 17float latold; 18float longold; 19float wholedistance; 20 21// The TinyGPS++ object 22TinyGPSPlus gps; 23 24// The serial connection to the GPS device 25SoftwareSerial ss(7, 6); //tx (on gps) - 7, rx (on gps) - 6 26 27//lcd settin 28 29//pinout 9 CLK , 10 DIN , 11 DC , 12 CE , 2 RST , 8 BL 30const int clk = 9; 31const int din = 10; 32const int dc = 11; 33const int ce = 12; 34const int rst = 2; 35const int bl = 8; //low - on, high - off 36 37Adafruit_PCD8544 display = Adafruit_PCD8544(clk, din, dc, ce, rst); 38 39 40 41void setup(){ 42 wholedistance = 0; 43 latold = 0; 44 longold = 0; 45 46 ss.begin(9600); 47 delay(300); 48 pinMode(bl, OUTPUT); 49 digitalWrite(bl, LOW); 50 display.begin(); 51 display.setContrast(60); 52 display.clearDisplay(); 53 54 display.setTextColor(BLACK); 55 display.setCursor(0,0); 56 display.setTextSize(1); 57 display.print("Bike computer v1.0, made by Trybulski Mikolaj "); 58 display.display(); 59 delay(2000); 60 display.clearDisplay(); 61 display.setCursor(0,0); 62 display.setTextSize(2); 63 display.print("waitingfor gps... "); 64 display.display(); 65} 66 67void loop(){ 68 display.clearDisplay(); 69 display.setTextColor(BLACK); 70 // This sketch displays information every time a new sentence is correctly encoded. 71 while (ss.available() > 0){ 72 gps.encode(ss.read()); 73 74 75 if (gps.location.isUpdated()){ 76 77 //dist calculations 78 if(latold == 0 || longold == 0){//dont calculate using 0 coordinates (which are set for stary value) 79 latold = gps.location.lat();//update ealier position 80 longold = gps.location.lng(); 81 delay(300); 82 } 83 else{ 84 if(gps.location.lat() == latold || gps.location.lng() == longold){ 85 delay(1000); 86 } 87 else{ 88 float distLat = abs(gps.location.lat() - latold) * 111194.9; 89 float distLong = 111194.9 * abs(gps.location.lng() - longold) * cos(radians((gps.location.lat() + latold) / 2)); 90 float distance = sqrt(pow(distLat, 2) + pow(distLong, 2)); // equation form https://www.instructables.com/Distance-measuring-and-more-device-using-Arduino-a/ 91 latold = gps.location.lat();//update ealier position 92 longold = gps.location.lng(); 93 wholedistance = distance + wholedistance; // add newly calculated distance to ealier one for trip distance 94 } 95 } 96 //dist display 97 display.setTextSize(1.5); 98 display.setCursor(0,25); 99 display.print(wholedistance / 1000); 100 display.println("km"); 101 102 int readvalue = gps.course.deg(); //define and round heading 103 int speedo = gps.speed.kmph(); // define and round speed 104 105 display.setCursor(0,0); 106 display.setTextSize(3); 107 display.print(speedo); 108 display.setTextSize(1); 109 display.print("kph "); 110 display.setTextSize(2); 111 112 if (readvalue >=338 || readvalue < 22){ 113 display.println("N"); 114 } 115 else if (readvalue >= 22 && readvalue < 68) 116 { 117 display.println("NE"); 118 } 119 else if (readvalue >= 68 && readvalue < 113) 120 { 121 display.println("E"); 122 } 123 else if (readvalue >= 113 && readvalue < 158) 124 { 125 display.println("SE"); 126 } 127 else if (readvalue >= 158 && readvalue < 203) 128 { 129 display.println("S"); 130 } 131 else if (readvalue >= 203 && readvalue < 248) 132 { 133 display.println("SW"); 134 } 135 else if (readvalue >= 248 && readvalue < 293) 136 { 137 display.println("W"); 138 } 139 else if (readvalue >= 293 && readvalue < 338) 140 { 141 display.println("NW"); 142 } 143 144 display.display(); 145 delay(1000); //wait. we dont need to update so many times 146 147 } 148 } 149} 150
Downloadable files
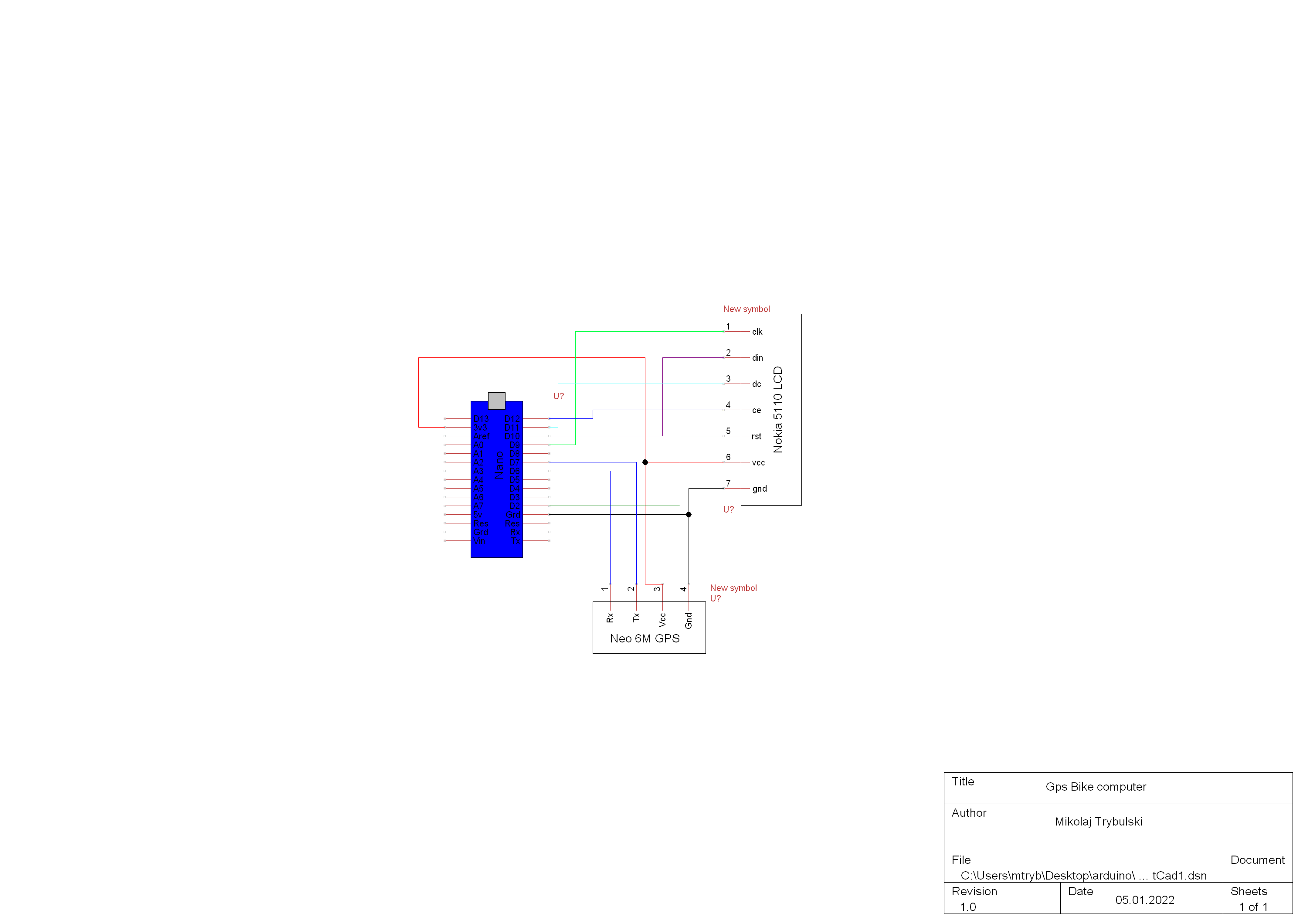
Schematic
Schematic
Comments
Only logged in users can leave comments