Devices & Components
1
Arduino Nano
1
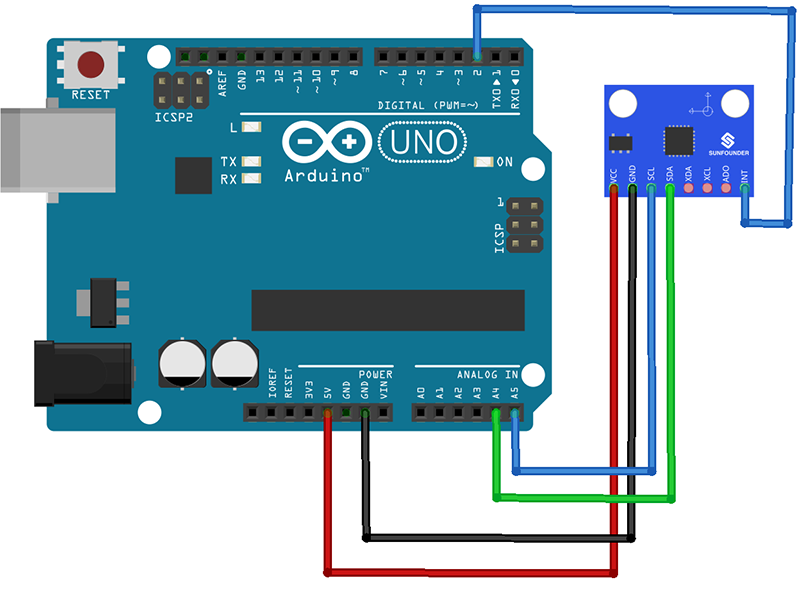
Inertial Measurement Unit (IMU) (6 deg of freedom)
Software & Tools
Arduino IDE
1
Processing
Project description
Code
untitled
c_cpp
1#include "MPU6050_6Axis_MotionApps20.h" 2//#include "MPU6050.h" // not necessary if using MotionApps include file 3 4// Arduino Wire library is required if I2Cdev I2CDEV_ARDUINO_WIRE implementation 5// is used in I2Cdev.h 6#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE 7 #include "Wire.h" 8#endif 9 10// class default I2C address is 0x68 11// specific I2C addresses may be passed as a parameter here 12// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board) 13// AD0 high = 0x69 14MPU6050 mpu; 15//MPU6050 mpu(0x69); // <-- use for AD0 high 16 17/* ========================================================================= 18 NOTE: In addition to connection 3.3v, GND, SDA, and SCL, this sketch 19 depends on the MPU-6050's INT pin being connected to the Arduino's 20 external interrupt #0 pin. On the Arduino Uno and Mega 2560, this is 21 digital I/O pin 2. 22 * ========================================================================= */ 23 24/* ========================================================================= 25 NOTE: Arduino v1.0.1 with the Leonardo board generates a compile error 26 when using Serial.write(buf, len). The Teapot output uses this method. 27 The solution requires a modification to the Arduino USBAPI.h file, which 28 is fortunately simple, but annoying. This will be fixed in the next IDE 29 release. For more info, see these links: 30 31 http://arduino.cc/forum/index.php/topic,109987.0.html 32 http://code.google.com/p/arduino/issues/detail?id=958 33 * ========================================================================= */ 34 35 36 37// uncomment "OUTPUT_READABLE_QUATERNION" if you want to see the actual 38// quaternion components in a [w, x, y, z] format (not best for parsing 39// on a remote host such as Processing or something though) 40//#define OUTPUT_READABLE_QUATERNION 41 42// uncomment "OUTPUT_READABLE_EULER" if you want to see Euler angles 43// (in degrees) calculated from the quaternions coming from the FIFO. 44// Note that Euler angles suffer from gimbal lock (for more info, see 45// http://en.wikipedia.org/wiki/Gimbal_lock) 46//#define OUTPUT_READABLE_EULER 47 48// uncomment "OUTPUT_READABLE_YAWPITCHROLL" if you want to see the yaw/ 49// pitch/roll angles (in degrees) calculated from the quaternions coming 50// from the FIFO. Note this also requires gravity vector calculations. 51// Also note that yaw/pitch/roll angles suffer from gimbal lock (for 52// more info, see: http://en.wikipedia.org/wiki/Gimbal_lock) 53#define OUTPUT_READABLE_YAWPITCHROLL 54 55// uncomment "OUTPUT_READABLE_REALACCEL" if you want to see acceleration 56// components with gravity removed. This acceleration reference frame is 57// not compensated for orientation, so +X is always +X according to the 58// sensor, just without the effects of gravity. If you want acceleration 59// compensated for orientation, us OUTPUT_READABLE_WORLDACCEL instead. 60//#define OUTPUT_READABLE_REALACCEL 61 62// uncomment "OUTPUT_READABLE_WORLDACCEL" if you want to see acceleration 63// components with gravity removed and adjusted for the world frame of 64// reference (yaw is relative to initial orientation, since no magnetometer 65// is present in this case). Could be quite handy in some cases. 66//#define OUTPUT_READABLE_WORLDACCEL 67 68// uncomment "OUTPUT_TEAPOT" if you want output that matches the 69// format used for the InvenSense teapot demo 70//#define OUTPUT_TEAPOT 71 72 73 74#define INTERRUPT_PIN 2 // use pin 2 on Arduino Uno & most boards 75#define LED_PIN 13 // (Arduino is 13, Teensy is 11, Teensy++ is 6) 76bool blinkState = false; 77 78// MPU control/status vars 79bool dmpReady = false; // set true if DMP init was successful 80uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU 81uint8_t devStatus; // return status after each device operation (0 = success, !0 = error) 82uint16_t packetSize; // expected DMP packet size (default is 42 bytes) 83uint16_t fifoCount; // count of all bytes currently in FIFO 84uint8_t fifoBuffer[64]; // FIFO storage buffer 85 86// orientation/motion vars 87Quaternion q; // [w, x, y, z] quaternion container 88VectorInt16 aa; // [x, y, z] accel sensor measurements 89VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements 90VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements 91VectorFloat gravity; // [x, y, z] gravity vector 92float euler[3]; // [psi, theta, phi] Euler angle container 93float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector 94 95// packet structure for InvenSense teapot demo 96uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\ ', '\ 97' }; 98 99 100 101// ================================================================ 102// === INTERRUPT DETECTION ROUTINE === 103// ================================================================ 104 105volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high 106void dmpDataReady() { 107 mpuInterrupt = true; 108} 109 110 111 112// ================================================================ 113// === INITIAL SETUP === 114// ================================================================ 115 116void setup() { 117 // join I2C bus (I2Cdev library doesn't do this automatically) 118 #if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE 119 Wire.begin(); 120 Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties 121 #elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE 122 Fastwire::setup(400, true); 123 #endif 124 125 // initialize serial communication 126 // (115200 chosen because it is required for Teapot Demo output, but it's 127 // really up to you depending on your project) 128 Serial.begin(115200); 129 while (!Serial); // wait for Leonardo enumeration, others continue immediately 130 131 // NOTE: 8MHz or slower host processors, like the Teensy @ 3.3V or Arduino 132 // Pro Mini running at 3.3V, cannot handle this baud rate reliably due to 133 // the baud timing being too misaligned with processor ticks. You must use 134 // 38400 or slower in these cases, or use some kind of external separate 135 // crystal solution for the UART timer. 136 137 // initialize device 138 Serial.println(F("Initializing I2C devices...")); 139 mpu.initialize(); 140 pinMode(INTERRUPT_PIN, INPUT); 141 142 // verify connection 143 Serial.println(F("Testing device connections...")); 144 Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed")); 145 146 // wait for ready 147 Serial.println(F("\ 148Send any character to begin DMP programming and demo: ")); 149 while (Serial.available() && Serial.read()); // empty buffer 150 while (!Serial.available()); // wait for data 151 while (Serial.available() && Serial.read()); // empty buffer again 152 153 // load and configure the DMP 154 Serial.println(F("Initializing DMP...")); 155 devStatus = mpu.dmpInitialize(); 156 157 // supply your own gyro offsets here, scaled for min sensitivity 158 mpu.setXGyroOffset(220); 159 mpu.setYGyroOffset(76); 160 mpu.setZGyroOffset(-85); 161 mpu.setZAccelOffset(1788); // 1688 factory default for my test chip 162 163 // make sure it worked (returns 0 if so) 164 if (devStatus == 0) { 165 // Calibration Time: generate offsets and calibrate our MPU6050 166 mpu.CalibrateAccel(6); 167 mpu.CalibrateGyro(6); 168 mpu.PrintActiveOffsets(); 169 // turn on the DMP, now that it's ready 170 Serial.println(F("Enabling DMP...")); 171 mpu.setDMPEnabled(true); 172 173 // enable Arduino interrupt detection 174 Serial.print(F("Enabling interrupt detection (Arduino external interrupt ")); 175 Serial.print(digitalPinToInterrupt(INTERRUPT_PIN)); 176 Serial.println(F(")...")); 177 attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING); 178 mpuIntStatus = mpu.getIntStatus(); 179 180 // set our DMP Ready flag so the main loop() function knows it's okay to use it 181 Serial.println(F("DMP ready! Waiting for first interrupt...")); 182 dmpReady = true; 183 184 // get expected DMP packet size for later comparison 185 packetSize = mpu.dmpGetFIFOPacketSize(); 186 } else { 187 // ERROR! 188 // 1 = initial memory load failed 189 // 2 = DMP configuration updates failed 190 // (if it's going to break, usually the code will be 1) 191 Serial.print(F("DMP Initialization failed (code ")); 192 Serial.print(devStatus); 193 Serial.println(F(")")); 194 } 195 196 // configure LED for output 197 pinMode(LED_PIN, OUTPUT); 198} 199 200 201 202// ================================================================ 203// === MAIN PROGRAM LOOP === 204// ================================================================ 205 206void loop() { 207 // if programming failed, don't try to do anything 208 if (!dmpReady) return; 209 210 // wait for MPU interrupt or extra packet(s) available 211 while (!mpuInterrupt && fifoCount < packetSize) { 212 if (mpuInterrupt && fifoCount < packetSize) { 213 // try to get out of the infinite loop 214 fifoCount = mpu.getFIFOCount(); 215 } 216 // other program behavior stuff here 217 // . 218 // . 219 // . 220 // if you are really paranoid you can frequently test in between other 221 // stuff to see if mpuInterrupt is true, and if so, "break;" from the 222 // while() loop to immediately process the MPU data 223 // . 224 // . 225 // . 226 } 227 228 // reset interrupt flag and get INT_STATUS byte 229 mpuInterrupt = false; 230 mpuIntStatus = mpu.getIntStatus(); 231 232 // get current FIFO count 233 fifoCount = mpu.getFIFOCount(); 234 if(fifoCount < packetSize){ 235 //Lets go back and wait for another interrupt. We shouldn't be here, we got an interrupt from another event 236 // This is blocking so don't do it while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount(); 237 } 238 // check for overflow (this should never happen unless our code is too inefficient) 239 else if ((mpuIntStatus & _BV(MPU6050_INTERRUPT_FIFO_OFLOW_BIT)) || fifoCount >= 1024) { 240 // reset so we can continue cleanly 241 mpu.resetFIFO(); 242 // fifoCount = mpu.getFIFOCount(); // will be zero after reset no need to ask 243 Serial.println(F("FIFO overflow!")); 244 245 // otherwise, check for DMP data ready interrupt (this should happen frequently) 246 } else if (mpuIntStatus & _BV(MPU6050_INTERRUPT_DMP_INT_BIT)) { 247 248 // read a packet from FIFO 249 while(fifoCount >= packetSize){ // Lets catch up to NOW, someone is using the dreaded delay()! 250 mpu.getFIFOBytes(fifoBuffer, packetSize); 251 // track FIFO count here in case there is > 1 packet available 252 // (this lets us immediately read more without waiting for an interrupt) 253 fifoCount -= packetSize; 254 } 255 #ifdef OUTPUT_READABLE_QUATERNION 256 // display quaternion values in easy matrix form: w x y z 257 mpu.dmpGetQuaternion(&q, fifoBuffer); 258 Serial.print("quat\ "); 259 Serial.print(q.w); 260 Serial.print("\ "); 261 Serial.print(q.x); 262 Serial.print("\ "); 263 Serial.print(q.y); 264 Serial.print("\ "); 265 Serial.println(q.z); 266 #endif 267 268 #ifdef OUTPUT_READABLE_EULER 269 // display Euler angles in degrees 270 mpu.dmpGetQuaternion(&q, fifoBuffer); 271 mpu.dmpGetEuler(euler, &q); 272 Serial.print("euler\ "); 273 Serial.print(euler[0] * 180/M_PI); 274 Serial.print("\ "); 275 Serial.print(euler[1] * 180/M_PI); 276 Serial.print("\ "); 277 Serial.println(euler[2] * 180/M_PI); 278 #endif 279 280 #ifdef OUTPUT_READABLE_YAWPITCHROLL 281 // display Euler angles in degrees 282 mpu.dmpGetQuaternion(&q, fifoBuffer); 283 mpu.dmpGetGravity(&gravity, &q); 284 mpu.dmpGetYawPitchRoll(ypr, &q, &gravity); 285 Serial.print("ypr\ "); 286 Serial.print(ypr[0] * 180/M_PI); 287 Serial.print("\ "); 288 Serial.print(ypr[1] * 180/M_PI); 289 Serial.print("\ "); 290 Serial.println(ypr[2] * 180/M_PI); 291 #endif 292 293 #ifdef OUTPUT_READABLE_REALACCEL 294 // display real acceleration, adjusted to remove gravity 295 mpu.dmpGetQuaternion(&q, fifoBuffer); 296 mpu.dmpGetAccel(&aa, fifoBuffer); 297 mpu.dmpGetGravity(&gravity, &q); 298 mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity); 299 Serial.print("areal\ "); 300 Serial.print(aaReal.x); 301 Serial.print("\ "); 302 Serial.print(aaReal.y); 303 Serial.print("\ "); 304 Serial.println(aaReal.z); 305 #endif 306 307 #ifdef OUTPUT_READABLE_WORLDACCEL 308 // display initial world-frame acceleration, adjusted to remove gravity 309 // and rotated based on known orientation from quaternion 310 mpu.dmpGetQuaternion(&q, fifoBuffer); 311 mpu.dmpGetAccel(&aa, fifoBuffer); 312 mpu.dmpGetGravity(&gravity, &q); 313 mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity); 314 mpu.dmpGetLinearAccelInWorld(&aaWorld, &aaReal, &q); 315 Serial.print("aworld\ "); 316 Serial.print(aaWorld.x); 317 Serial.print("\ "); 318 Serial.print(aaWorld.y); 319 Serial.print("\ "); 320 Serial.println(aaWorld.z); 321 #endif 322 323 #ifdef OUTPUT_TEAPOT 324 // display quaternion values in InvenSense Teapot demo format: 325 teapotPacket[2] = fifoBuffer[0]; 326 teapotPacket[3] = fifoBuffer[1]; 327 teapotPacket[4] = fifoBuffer[4]; 328 teapotPacket[5] = fifoBuffer[5]; 329 teapotPacket[6] = fifoBuffer[8]; 330 teapotPacket[7] = fifoBuffer[9]; 331 teapotPacket[8] = fifoBuffer[12]; 332 teapotPacket[9] = fifoBuffer[13]; 333 Serial.write(teapotPacket, 14); 334 teapotPacket[11]++; // packetCount, loops at 0xFF on purpose 335 #endif 336 337 // blink LED to indicate activity 338 blinkState = !blinkState; 339 digitalWrite(LED_PIN, blinkState); 340 } 341}
untitled
c_cpp
1#include "MPU6050_6Axis_MotionApps20.h" 2//#include "MPU6050.h" 3 // not necessary if using MotionApps include file 4 5// Arduino Wire library 6 is required if I2Cdev I2CDEV_ARDUINO_WIRE implementation 7// is used in I2Cdev.h 8#if 9 I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE 10 #include "Wire.h" 11#endif 12 13// 14 class default I2C address is 0x68 15// specific I2C addresses may be passed as 16 a parameter here 17// AD0 low = 0x68 (default for SparkFun breakout and InvenSense 18 evaluation board) 19// AD0 high = 0x69 20MPU6050 mpu; 21//MPU6050 mpu(0x69); 22 // <-- use for AD0 high 23 24/* ========================================================================= 25 26 NOTE: In addition to connection 3.3v, GND, SDA, and SCL, this sketch 27 depends 28 on the MPU-6050's INT pin being connected to the Arduino's 29 external interrupt 30 #0 pin. On the Arduino Uno and Mega 2560, this is 31 digital I/O pin 2. 32 * 33 ========================================================================= */ 34 35/* 36 ========================================================================= 37 NOTE: 38 Arduino v1.0.1 with the Leonardo board generates a compile error 39 when using 40 Serial.write(buf, len). The Teapot output uses this method. 41 The solution requires 42 a modification to the Arduino USBAPI.h file, which 43 is fortunately simple, 44 but annoying. This will be fixed in the next IDE 45 release. For more info, see 46 these links: 47 48 http://arduino.cc/forum/index.php/topic,109987.0.html 49 50 http://code.google.com/p/arduino/issues/detail?id=958 51 * ========================================================================= 52 */ 53 54 55 56// uncomment "OUTPUT_READABLE_QUATERNION" if you want to see 57 the actual 58// quaternion components in a [w, x, y, z] format (not best for parsing 59// 60 on a remote host such as Processing or something though) 61//#define OUTPUT_READABLE_QUATERNION 62 63// 64 uncomment "OUTPUT_READABLE_EULER" if you want to see Euler angles 65// (in degrees) 66 calculated from the quaternions coming from the FIFO. 67// Note that Euler angles 68 suffer from gimbal lock (for more info, see 69// http://en.wikipedia.org/wiki/Gimbal_lock) 70//#define 71 OUTPUT_READABLE_EULER 72 73// uncomment "OUTPUT_READABLE_YAWPITCHROLL" if you 74 want to see the yaw/ 75// pitch/roll angles (in degrees) calculated from the quaternions 76 coming 77// from the FIFO. Note this also requires gravity vector calculations. 78// 79 Also note that yaw/pitch/roll angles suffer from gimbal lock (for 80// more info, 81 see: http://en.wikipedia.org/wiki/Gimbal_lock) 82#define OUTPUT_READABLE_YAWPITCHROLL 83 84// 85 uncomment "OUTPUT_READABLE_REALACCEL" if you want to see acceleration 86// components 87 with gravity removed. This acceleration reference frame is 88// not compensated 89 for orientation, so +X is always +X according to the 90// sensor, just without 91 the effects of gravity. If you want acceleration 92// compensated for orientation, 93 us OUTPUT_READABLE_WORLDACCEL instead. 94//#define OUTPUT_READABLE_REALACCEL 95 96// 97 uncomment "OUTPUT_READABLE_WORLDACCEL" if you want to see acceleration 98// components 99 with gravity removed and adjusted for the world frame of 100// reference (yaw is 101 relative to initial orientation, since no magnetometer 102// is present in this 103 case). Could be quite handy in some cases. 104//#define OUTPUT_READABLE_WORLDACCEL 105 106// 107 uncomment "OUTPUT_TEAPOT" if you want output that matches the 108// format used 109 for the InvenSense teapot demo 110//#define OUTPUT_TEAPOT 111 112 113 114#define 115 INTERRUPT_PIN 2 // use pin 2 on Arduino Uno & most boards 116#define LED_PIN 13 117 // (Arduino is 13, Teensy is 11, Teensy++ is 6) 118bool blinkState = false; 119 120// 121 MPU control/status vars 122bool dmpReady = false; // set true if DMP init was successful 123uint8_t 124 mpuIntStatus; // holds actual interrupt status byte from MPU 125uint8_t devStatus; 126 // return status after each device operation (0 = success, !0 = error) 127uint16_t 128 packetSize; // expected DMP packet size (default is 42 bytes) 129uint16_t fifoCount; 130 // count of all bytes currently in FIFO 131uint8_t fifoBuffer[64]; // FIFO 132 storage buffer 133 134// orientation/motion vars 135Quaternion q; // [w, 136 x, y, z] quaternion container 137VectorInt16 aa; // [x, y, z] accel 138 sensor measurements 139VectorInt16 aaReal; // [x, y, z] gravity-free 140 accel sensor measurements 141VectorInt16 aaWorld; // [x, y, z] world-frame 142 accel sensor measurements 143VectorFloat gravity; // [x, y, z] gravity 144 vector 145float euler[3]; // [psi, theta, phi] Euler angle container 146float 147 ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector 148 149// 150 packet structure for InvenSense teapot demo 151uint8_t teapotPacket[14] = { '$', 152 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\ ', '\ 153' }; 154 155 156 157// ================================================================ 158// 159 === INTERRUPT DETECTION ROUTINE === 160// ================================================================ 161 162volatile 163 bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high 164void 165 dmpDataReady() { 166 mpuInterrupt = true; 167} 168 169 170 171// ================================================================ 172// 173 === INITIAL SETUP === 174// ================================================================ 175 176void 177 setup() { 178 // join I2C bus (I2Cdev library doesn't do this automatically) 179 180 #if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE 181 Wire.begin(); 182 183 Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having 184 compilation difficulties 185 #elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE 186 187 Fastwire::setup(400, true); 188 #endif 189 190 // initialize serial 191 communication 192 // (115200 chosen because it is required for Teapot Demo output, 193 but it's 194 // really up to you depending on your project) 195 Serial.begin(115200); 196 197 while (!Serial); // wait for Leonardo enumeration, others continue immediately 198 199 200 // NOTE: 8MHz or slower host processors, like the Teensy @ 3.3V or Arduino 201 202 // Pro Mini running at 3.3V, cannot handle this baud rate reliably due to 203 204 // the baud timing being too misaligned with processor ticks. You must use 205 206 // 38400 or slower in these cases, or use some kind of external separate 207 208 // crystal solution for the UART timer. 209 210 // initialize device 211 212 Serial.println(F("Initializing I2C devices...")); 213 mpu.initialize(); 214 215 pinMode(INTERRUPT_PIN, INPUT); 216 217 // verify connection 218 Serial.println(F("Testing 219 device connections...")); 220 Serial.println(mpu.testConnection() ? F("MPU6050 221 connection successful") : F("MPU6050 connection failed")); 222 223 // wait 224 for ready 225 Serial.println(F("\ 226Send any character to begin DMP programming 227 and demo: ")); 228 while (Serial.available() && Serial.read()); // empty buffer 229 230 while (!Serial.available()); // wait for data 231 while (Serial.available() 232 && Serial.read()); // empty buffer again 233 234 // load and configure the DMP 235 236 Serial.println(F("Initializing DMP...")); 237 devStatus = mpu.dmpInitialize(); 238 239 240 // supply your own gyro offsets here, scaled for min sensitivity 241 mpu.setXGyroOffset(220); 242 243 mpu.setYGyroOffset(76); 244 mpu.setZGyroOffset(-85); 245 mpu.setZAccelOffset(1788); 246 // 1688 factory default for my test chip 247 248 // make sure it worked (returns 249 0 if so) 250 if (devStatus == 0) { 251 // Calibration Time: generate offsets 252 and calibrate our MPU6050 253 mpu.CalibrateAccel(6); 254 mpu.CalibrateGyro(6); 255 256 mpu.PrintActiveOffsets(); 257 // turn on the DMP, now that it's ready 258 259 Serial.println(F("Enabling DMP...")); 260 mpu.setDMPEnabled(true); 261 262 263 // enable Arduino interrupt detection 264 Serial.print(F("Enabling 265 interrupt detection (Arduino external interrupt ")); 266 Serial.print(digitalPinToInterrupt(INTERRUPT_PIN)); 267 268 Serial.println(F(")...")); 269 attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), 270 dmpDataReady, RISING); 271 mpuIntStatus = mpu.getIntStatus(); 272 273 // 274 set our DMP Ready flag so the main loop() function knows it's okay to use it 275 276 Serial.println(F("DMP ready! Waiting for first interrupt...")); 277 dmpReady 278 = true; 279 280 // get expected DMP packet size for later comparison 281 282 packetSize = mpu.dmpGetFIFOPacketSize(); 283 } else { 284 // ERROR! 285 286 // 1 = initial memory load failed 287 // 2 = DMP configuration updates 288 failed 289 // (if it's going to break, usually the code will be 1) 290 Serial.print(F("DMP 291 Initialization failed (code ")); 292 Serial.print(devStatus); 293 Serial.println(F(")")); 294 295 } 296 297 // configure LED for output 298 pinMode(LED_PIN, OUTPUT); 299} 300 301 302 303// 304 ================================================================ 305// === MAIN 306 PROGRAM LOOP === 307// ================================================================ 308 309void 310 loop() { 311 // if programming failed, don't try to do anything 312 if (!dmpReady) 313 return; 314 315 // wait for MPU interrupt or extra packet(s) available 316 while 317 (!mpuInterrupt && fifoCount < packetSize) { 318 if (mpuInterrupt && fifoCount 319 < packetSize) { 320 // try to get out of the infinite loop 321 fifoCount 322 = mpu.getFIFOCount(); 323 } 324 // other program behavior stuff 325 here 326 // . 327 // . 328 // . 329 // if you are really 330 paranoid you can frequently test in between other 331 // stuff to see if 332 mpuInterrupt is true, and if so, "break;" from the 333 // while() loop 334 to immediately process the MPU data 335 // . 336 // . 337 // 338 . 339 } 340 341 // reset interrupt flag and get INT_STATUS byte 342 mpuInterrupt 343 = false; 344 mpuIntStatus = mpu.getIntStatus(); 345 346 // get current FIFO 347 count 348 fifoCount = mpu.getFIFOCount(); 349 if(fifoCount < packetSize){ 350 351 //Lets go back and wait for another interrupt. We shouldn't be here, we 352 got an interrupt from another event 353 // This is blocking so don't do it 354 while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount(); 355 } 356 // 357 check for overflow (this should never happen unless our code is too inefficient) 358 359 else if ((mpuIntStatus & _BV(MPU6050_INTERRUPT_FIFO_OFLOW_BIT)) || fifoCount 360 >= 1024) { 361 // reset so we can continue cleanly 362 mpu.resetFIFO(); 363 364 // fifoCount = mpu.getFIFOCount(); // will be zero after reset no need to 365 ask 366 Serial.println(F("FIFO overflow!")); 367 368 // otherwise, check 369 for DMP data ready interrupt (this should happen frequently) 370 } else if (mpuIntStatus 371 & _BV(MPU6050_INTERRUPT_DMP_INT_BIT)) { 372 373 // read a packet from FIFO 374 while(fifoCount 375 >= packetSize){ // Lets catch up to NOW, someone is using the dreaded delay()! 376 mpu.getFIFOBytes(fifoBuffer, 377 packetSize); 378 // track FIFO count here in case there is > 1 packet available 379 // 380 (this lets us immediately read more without waiting for an interrupt) 381 fifoCount 382 -= packetSize; 383 } 384 #ifdef OUTPUT_READABLE_QUATERNION 385 // 386 display quaternion values in easy matrix form: w x y z 387 mpu.dmpGetQuaternion(&q, 388 fifoBuffer); 389 Serial.print("quat\ "); 390 Serial.print(q.w); 391 392 Serial.print("\ "); 393 Serial.print(q.x); 394 Serial.print("\ "); 395 396 Serial.print(q.y); 397 Serial.print("\ "); 398 Serial.println(q.z); 399 400 #endif 401 402 #ifdef OUTPUT_READABLE_EULER 403 // display 404 Euler angles in degrees 405 mpu.dmpGetQuaternion(&q, fifoBuffer); 406 407 mpu.dmpGetEuler(euler, &q); 408 Serial.print("euler\ "); 409 410 Serial.print(euler[0] * 180/M_PI); 411 Serial.print("\ "); 412 413 Serial.print(euler[1] * 180/M_PI); 414 Serial.print("\ "); 415 416 Serial.println(euler[2] * 180/M_PI); 417 #endif 418 419 #ifdef 420 OUTPUT_READABLE_YAWPITCHROLL 421 // display Euler angles in degrees 422 423 mpu.dmpGetQuaternion(&q, fifoBuffer); 424 mpu.dmpGetGravity(&gravity, 425 &q); 426 mpu.dmpGetYawPitchRoll(ypr, &q, &gravity); 427 Serial.print("ypr\ "); 428 429 Serial.print(ypr[0] * 180/M_PI); 430 Serial.print("\ "); 431 432 Serial.print(ypr[1] * 180/M_PI); 433 Serial.print("\ "); 434 435 Serial.println(ypr[2] * 180/M_PI); 436 #endif 437 438 #ifdef 439 OUTPUT_READABLE_REALACCEL 440 // display real acceleration, adjusted 441 to remove gravity 442 mpu.dmpGetQuaternion(&q, fifoBuffer); 443 mpu.dmpGetAccel(&aa, 444 fifoBuffer); 445 mpu.dmpGetGravity(&gravity, &q); 446 mpu.dmpGetLinearAccel(&aaReal, 447 &aa, &gravity); 448 Serial.print("areal\ "); 449 Serial.print(aaReal.x); 450 451 Serial.print("\ "); 452 Serial.print(aaReal.y); 453 Serial.print("\ "); 454 455 Serial.println(aaReal.z); 456 #endif 457 458 #ifdef OUTPUT_READABLE_WORLDACCEL 459 460 // display initial world-frame acceleration, adjusted to remove gravity 461 462 // and rotated based on known orientation from quaternion 463 mpu.dmpGetQuaternion(&q, 464 fifoBuffer); 465 mpu.dmpGetAccel(&aa, fifoBuffer); 466 mpu.dmpGetGravity(&gravity, 467 &q); 468 mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity); 469 mpu.dmpGetLinearAccelInWorld(&aaWorld, 470 &aaReal, &q); 471 Serial.print("aworld\ "); 472 Serial.print(aaWorld.x); 473 474 Serial.print("\ "); 475 Serial.print(aaWorld.y); 476 Serial.print("\ "); 477 478 Serial.println(aaWorld.z); 479 #endif 480 481 #ifdef 482 OUTPUT_TEAPOT 483 // display quaternion values in InvenSense Teapot demo 484 format: 485 teapotPacket[2] = fifoBuffer[0]; 486 teapotPacket[3] 487 = fifoBuffer[1]; 488 teapotPacket[4] = fifoBuffer[4]; 489 teapotPacket[5] 490 = fifoBuffer[5]; 491 teapotPacket[6] = fifoBuffer[8]; 492 teapotPacket[7] 493 = fifoBuffer[9]; 494 teapotPacket[8] = fifoBuffer[12]; 495 teapotPacket[9] 496 = fifoBuffer[13]; 497 Serial.write(teapotPacket, 14); 498 teapotPacket[11]++; 499 // packetCount, loops at 0xFF on purpose 500 #endif 501 502 // blink 503 LED to indicate activity 504 blinkState = !blinkState; 505 digitalWrite(LED_PIN, 506 blinkState); 507 } 508}
untitled
c_cpp
1#include "MPU6050_6Axis_MotionApps20.h" 2//#include "MPU6050.h" // not necessary if using MotionApps include file 3 4// Arduino Wire library is required if I2Cdev I2CDEV_ARDUINO_WIRE implementation 5// is used in I2Cdev.h 6#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE 7 #include "Wire.h" 8#endif 9 10// class default I2C address is 0x68 11// specific I2C addresses may be passed as a parameter here 12// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board) 13// AD0 high = 0x69 14MPU6050 mpu; 15//MPU6050 mpu(0x69); // <-- use for AD0 high 16 17/* ========================================================================= 18 NOTE: In addition to connection 3.3v, GND, SDA, and SCL, this sketch 19 depends on the MPU-6050's INT pin being connected to the Arduino's 20 external interrupt #0 pin. On the Arduino Uno and Mega 2560, this is 21 digital I/O pin 2. 22 * ========================================================================= */ 23 24/* ========================================================================= 25 NOTE: Arduino v1.0.1 with the Leonardo board generates a compile error 26 when using Serial.write(buf, len). The Teapot output uses this method. 27 The solution requires a modification to the Arduino USBAPI.h file, which 28 is fortunately simple, but annoying. This will be fixed in the next IDE 29 release. For more info, see these links: 30 31 http://arduino.cc/forum/index.php/topic,109987.0.html 32 http://code.google.com/p/arduino/issues/detail?id=958 33 * ========================================================================= */ 34 35 36 37// uncomment "OUTPUT_READABLE_QUATERNION" if you want to see the actual 38// quaternion components in a [w, x, y, z] format (not best for parsing 39// on a remote host such as Processing or something though) 40//#define OUTPUT_READABLE_QUATERNION 41 42// uncomment "OUTPUT_READABLE_EULER" if you want to see Euler angles 43// (in degrees) calculated from the quaternions coming from the FIFO. 44// Note that Euler angles suffer from gimbal lock (for more info, see 45// http://en.wikipedia.org/wiki/Gimbal_lock) 46//#define OUTPUT_READABLE_EULER 47 48// uncomment "OUTPUT_READABLE_YAWPITCHROLL" if you want to see the yaw/ 49// pitch/roll angles (in degrees) calculated from the quaternions coming 50// from the FIFO. Note this also requires gravity vector calculations. 51// Also note that yaw/pitch/roll angles suffer from gimbal lock (for 52// more info, see: http://en.wikipedia.org/wiki/Gimbal_lock) 53#define OUTPUT_READABLE_YAWPITCHROLL 54 55// uncomment "OUTPUT_READABLE_REALACCEL" if you want to see acceleration 56// components with gravity removed. This acceleration reference frame is 57// not compensated for orientation, so +X is always +X according to the 58// sensor, just without the effects of gravity. If you want acceleration 59// compensated for orientation, us OUTPUT_READABLE_WORLDACCEL instead. 60//#define OUTPUT_READABLE_REALACCEL 61 62// uncomment "OUTPUT_READABLE_WORLDACCEL" if you want to see acceleration 63// components with gravity removed and adjusted for the world frame of 64// reference (yaw is relative to initial orientation, since no magnetometer 65// is present in this case). Could be quite handy in some cases. 66//#define OUTPUT_READABLE_WORLDACCEL 67 68// uncomment "OUTPUT_TEAPOT" if you want output that matches the 69// format used for the InvenSense teapot demo 70//#define OUTPUT_TEAPOT 71 72 73 74#define INTERRUPT_PIN 2 // use pin 2 on Arduino Uno & most boards 75#define LED_PIN 13 // (Arduino is 13, Teensy is 11, Teensy++ is 6) 76bool blinkState = false; 77 78// MPU control/status vars 79bool dmpReady = false; // set true if DMP init was successful 80uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU 81uint8_t devStatus; // return status after each device operation (0 = success, !0 = error) 82uint16_t packetSize; // expected DMP packet size (default is 42 bytes) 83uint16_t fifoCount; // count of all bytes currently in FIFO 84uint8_t fifoBuffer[64]; // FIFO storage buffer 85 86// orientation/motion vars 87Quaternion q; // [w, x, y, z] quaternion container 88VectorInt16 aa; // [x, y, z] accel sensor measurements 89VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements 90VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements 91VectorFloat gravity; // [x, y, z] gravity vector 92float euler[3]; // [psi, theta, phi] Euler angle container 93float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector 94 95// packet structure for InvenSense teapot demo 96uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' }; 97 98 99 100// ================================================================ 101// === INTERRUPT DETECTION ROUTINE === 102// ================================================================ 103 104volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high 105void dmpDataReady() { 106 mpuInterrupt = true; 107} 108 109 110 111// ================================================================ 112// === INITIAL SETUP === 113// ================================================================ 114 115void setup() { 116 // join I2C bus (I2Cdev library doesn't do this automatically) 117 #if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE 118 Wire.begin(); 119 Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties 120 #elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE 121 Fastwire::setup(400, true); 122 #endif 123 124 // initialize serial communication 125 // (115200 chosen because it is required for Teapot Demo output, but it's 126 // really up to you depending on your project) 127 Serial.begin(115200); 128 while (!Serial); // wait for Leonardo enumeration, others continue immediately 129 130 // NOTE: 8MHz or slower host processors, like the Teensy @ 3.3V or Arduino 131 // Pro Mini running at 3.3V, cannot handle this baud rate reliably due to 132 // the baud timing being too misaligned with processor ticks. You must use 133 // 38400 or slower in these cases, or use some kind of external separate 134 // crystal solution for the UART timer. 135 136 // initialize device 137 Serial.println(F("Initializing I2C devices...")); 138 mpu.initialize(); 139 pinMode(INTERRUPT_PIN, INPUT); 140 141 // verify connection 142 Serial.println(F("Testing device connections...")); 143 Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed")); 144 145 // wait for ready 146 Serial.println(F("\ 147Send any character to begin DMP programming and demo: ")); 148 while (Serial.available() && Serial.read()); // empty buffer 149 while (!Serial.available()); // wait for data 150 while (Serial.available() && Serial.read()); // empty buffer again 151 152 // load and configure the DMP 153 Serial.println(F("Initializing DMP...")); 154 devStatus = mpu.dmpInitialize(); 155 156 // supply your own gyro offsets here, scaled for min sensitivity 157 mpu.setXGyroOffset(220); 158 mpu.setYGyroOffset(76); 159 mpu.setZGyroOffset(-85); 160 mpu.setZAccelOffset(1788); // 1688 factory default for my test chip 161 162 // make sure it worked (returns 0 if so) 163 if (devStatus == 0) { 164 // Calibration Time: generate offsets and calibrate our MPU6050 165 mpu.CalibrateAccel(6); 166 mpu.CalibrateGyro(6); 167 mpu.PrintActiveOffsets(); 168 // turn on the DMP, now that it's ready 169 Serial.println(F("Enabling DMP...")); 170 mpu.setDMPEnabled(true); 171 172 // enable Arduino interrupt detection 173 Serial.print(F("Enabling interrupt detection (Arduino external interrupt ")); 174 Serial.print(digitalPinToInterrupt(INTERRUPT_PIN)); 175 Serial.println(F(")...")); 176 attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING); 177 mpuIntStatus = mpu.getIntStatus(); 178 179 // set our DMP Ready flag so the main loop() function knows it's okay to use it 180 Serial.println(F("DMP ready! Waiting for first interrupt...")); 181 dmpReady = true; 182 183 // get expected DMP packet size for later comparison 184 packetSize = mpu.dmpGetFIFOPacketSize(); 185 } else { 186 // ERROR! 187 // 1 = initial memory load failed 188 // 2 = DMP configuration updates failed 189 // (if it's going to break, usually the code will be 1) 190 Serial.print(F("DMP Initialization failed (code ")); 191 Serial.print(devStatus); 192 Serial.println(F(")")); 193 } 194 195 // configure LED for output 196 pinMode(LED_PIN, OUTPUT); 197} 198 199 200 201// ================================================================ 202// === MAIN PROGRAM LOOP === 203// ================================================================ 204 205void loop() { 206 // if programming failed, don't try to do anything 207 if (!dmpReady) return; 208 209 // wait for MPU interrupt or extra packet(s) available 210 while (!mpuInterrupt && fifoCount < packetSize) { 211 if (mpuInterrupt && fifoCount < packetSize) { 212 // try to get out of the infinite loop 213 fifoCount = mpu.getFIFOCount(); 214 } 215 // other program behavior stuff here 216 // . 217 // . 218 // . 219 // if you are really paranoid you can frequently test in between other 220 // stuff to see if mpuInterrupt is true, and if so, "break;" from the 221 // while() loop to immediately process the MPU data 222 // . 223 // . 224 // . 225 } 226 227 // reset interrupt flag and get INT_STATUS byte 228 mpuInterrupt = false; 229 mpuIntStatus = mpu.getIntStatus(); 230 231 // get current FIFO count 232 fifoCount = mpu.getFIFOCount(); 233 if(fifoCount < packetSize){ 234 //Lets go back and wait for another interrupt. We shouldn't be here, we got an interrupt from another event 235 // This is blocking so don't do it while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount(); 236 } 237 // check for overflow (this should never happen unless our code is too inefficient) 238 else if ((mpuIntStatus & _BV(MPU6050_INTERRUPT_FIFO_OFLOW_BIT)) || fifoCount >= 1024) { 239 // reset so we can continue cleanly 240 mpu.resetFIFO(); 241 // fifoCount = mpu.getFIFOCount(); // will be zero after reset no need to ask 242 Serial.println(F("FIFO overflow!")); 243 244 // otherwise, check for DMP data ready interrupt (this should happen frequently) 245 } else if (mpuIntStatus & _BV(MPU6050_INTERRUPT_DMP_INT_BIT)) { 246 247 // read a packet from FIFO 248 while(fifoCount >= packetSize){ // Lets catch up to NOW, someone is using the dreaded delay()! 249 mpu.getFIFOBytes(fifoBuffer, packetSize); 250 // track FIFO count here in case there is > 1 packet available 251 // (this lets us immediately read more without waiting for an interrupt) 252 fifoCount -= packetSize; 253 } 254 #ifdef OUTPUT_READABLE_QUATERNION 255 // display quaternion values in easy matrix form: w x y z 256 mpu.dmpGetQuaternion(&q, fifoBuffer); 257 Serial.print("quat\ "); 258 Serial.print(q.w); 259 Serial.print("\ "); 260 Serial.print(q.x); 261 Serial.print("\ "); 262 Serial.print(q.y); 263 Serial.print("\ "); 264 Serial.println(q.z); 265 #endif 266 267 #ifdef OUTPUT_READABLE_EULER 268 // display Euler angles in degrees 269 mpu.dmpGetQuaternion(&q, fifoBuffer); 270 mpu.dmpGetEuler(euler, &q); 271 Serial.print("euler\ "); 272 Serial.print(euler[0] * 180/M_PI); 273 Serial.print("\ "); 274 Serial.print(euler[1] * 180/M_PI); 275 Serial.print("\ "); 276 Serial.println(euler[2] * 180/M_PI); 277 #endif 278 279 #ifdef OUTPUT_READABLE_YAWPITCHROLL 280 // display Euler angles in degrees 281 mpu.dmpGetQuaternion(&q, fifoBuffer); 282 mpu.dmpGetGravity(&gravity, &q); 283 mpu.dmpGetYawPitchRoll(ypr, &q, &gravity); 284 Serial.print("ypr\ "); 285 Serial.print(ypr[0] * 180/M_PI); 286 Serial.print("\ "); 287 Serial.print(ypr[1] * 180/M_PI); 288 Serial.print("\ "); 289 Serial.println(ypr[2] * 180/M_PI); 290 #endif 291 292 #ifdef OUTPUT_READABLE_REALACCEL 293 // display real acceleration, adjusted to remove gravity 294 mpu.dmpGetQuaternion(&q, fifoBuffer); 295 mpu.dmpGetAccel(&aa, fifoBuffer); 296 mpu.dmpGetGravity(&gravity, &q); 297 mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity); 298 Serial.print("areal\ "); 299 Serial.print(aaReal.x); 300 Serial.print("\ "); 301 Serial.print(aaReal.y); 302 Serial.print("\ "); 303 Serial.println(aaReal.z); 304 #endif 305 306 #ifdef OUTPUT_READABLE_WORLDACCEL 307 // display initial world-frame acceleration, adjusted to remove gravity 308 // and rotated based on known orientation from quaternion 309 mpu.dmpGetQuaternion(&q, fifoBuffer); 310 mpu.dmpGetAccel(&aa, fifoBuffer); 311 mpu.dmpGetGravity(&gravity, &q); 312 mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity); 313 mpu.dmpGetLinearAccelInWorld(&aaWorld, &aaReal, &q); 314 Serial.print("aworld\ "); 315 Serial.print(aaWorld.x); 316 Serial.print("\ "); 317 Serial.print(aaWorld.y); 318 Serial.print("\ "); 319 Serial.println(aaWorld.z); 320 #endif 321 322 #ifdef OUTPUT_TEAPOT 323 // display quaternion values in InvenSense Teapot demo format: 324 teapotPacket[2] = fifoBuffer[0]; 325 teapotPacket[3] = fifoBuffer[1]; 326 teapotPacket[4] = fifoBuffer[4]; 327 teapotPacket[5] = fifoBuffer[5]; 328 teapotPacket[6] = fifoBuffer[8]; 329 teapotPacket[7] = fifoBuffer[9]; 330 teapotPacket[8] = fifoBuffer[12]; 331 teapotPacket[9] = fifoBuffer[13]; 332 Serial.write(teapotPacket, 14); 333 teapotPacket[11]++; // packetCount, loops at 0xFF on purpose 334 #endif 335 336 // blink LED to indicate activity 337 blinkState = !blinkState; 338 digitalWrite(LED_PIN, blinkState); 339 } 340}
Downloadable files
untitled
untitled
Comments
Only logged in users can leave comments