Devices & Components
1
Arduino Uno Rev3
1
RGB Diffused Common Cathode
1
Dk motor shield
3
9V battery (generic)
25
Jumper wires (generic)
1
Buzzer
1
Breadboard (generic)
1
SG90 Micro-servo motor
1
Ultrasonic Sensor - HC-SR04 (Generic)
2
DC motor (generic)
Hardware & Tools
1
Hot glue gun (generic)
Software & Tools
1
Arduino Web Editor
Project description
Code
CODE
arduino
copy and paste from the below
1#include <AFMotor.h> 2#include <Servo.h> // Add Servo Motor library. 3#define BuzzPIN A0 // Assign PIN A0 as BuzzPIN (Connect Arduino UNO "A0" PIN with Buzzer "+" PIN). 4#define TrigPIN A1 // PIN A1 as TrigPIN (Connect Arduino UNO "A1" PIN with Ultrasonic Sonar Sensor "Trig" PIN). 5#define EchoPIN A2 // Assign PIN A2 as EchoPIN (Connect Arduino UNO "A2" PIN with Ultrasonic Sonar Sensor "Trig" PIN). 6#define LEDBPIN A3 // Assign PIN A3 as LEDBPIN (Connect Arduino UNO "A3" PIN with RGB Diffused Common Cathode "LEDB" PIN). 7#define LEDGPIN A4 // Assign PIN A4 as LEDGPIN (Connect Arduino UNO "A4" PIN with RGB Diffused Common Cathode "LEDG" PIN). 8#define LEDRPIN A5 // Assign PIN A5 as LEDRPIN (Connect Arduino UNO "A5" PIN with RGB Diffused Common Cathode "LEDR" PIN). 9#define DCMROFF 25 // This sets Offset to allow differences between the two DC traction Motors. 10AF_DCMotor M1 (1, MOTOR12_64KHZ); // Create DCMotor #1 using M1 output, Set to 64kHz PWM frequency. 11AF_DCMotor M2 (2, MOTOR12_64KHZ); // Create DCMotor #2 using M2 output, Set to 64kHz PWM frequency. 12Servo SER1; // Create Servo object to control Servo. 13int Search (void) { // Integer type variable declaration. 14 float Duration = 0.0; // Float type variable declaration. 15 float CM = 0.0; // Float type variable declaration. 16 digitalWrite (TrigPIN, LOW); // TrigPIN output as 0V (Logic low level). 17 delayMicroseconds (2); // Delay for 2us, Send 10 us high pulse to Ultrasonic Sonar Sensor "TrigPIN". 18 digitalWrite (TrigPIN, HIGH); // TrigPIN output as 5V (Logic high level). 19 delayMicroseconds (10); // Delay for 10us. 20 digitalWrite (TrigPIN, LOW); // TrigPIN output as 0V (Logic low level). 21 Duration = pulseIn (EchoPIN, HIGH); // Start counting time, Upto again EchoPIN back to logic "High Level" and puting the "Time" into variable called "Duration". 22 CM = (Duration / 58.8); // Convert Distance into CM. 23 return CM; // Return to CM. 24} 25int RightDistance, LeftDistance; // Distances on either side. 26float Distance = 0.00; // Float type variable declaration. 27void setup () { // Setup loop. 28 pinMode (BuzzPIN, OUTPUT); // Declare BuzzPIN as "Output PIN". 29 pinMode (TrigPIN, OUTPUT); // Declare TrigPIN as "Output PIN". 30 pinMode (EchoPIN, INPUT); // Declare EchoPIN as "Output PIN". 31 pinMode (LEDBPIN, OUTPUT); // Declare LEDBPIN as "Output PIN". 32 pinMode (LEDGPIN, OUTPUT); // Declare LEDGPIN as "Output PIN". 33 pinMode (LEDRPIN, OUTPUT); // Declare LEDRPIN as "Output PIN". 34 SER1.attach (10); // Attaches the Servo on pin 10 (SER1 on the Adafruit Motor Shield for Arduino kit to the Servo object). 35} 36void loop () { // Main loop. 37 SER1.write (80); // Tells the Servo to position at 80 degrees (Facing forward). 38 delay (100); // Delay for 0.1s. 39 Distance = Search (); // Measuring the Distance in CM. 40 if (Distance < 30) { // If obstacle found in 30cm. 41 digitalWrite (BuzzPIN, HIGH); // BuzzPIN output as 5V (Logic high level). 42 digitalWrite (LEDBPIN, LOW); // LEDBPIN output as 0V (Logic low level). 43 digitalWrite (LEDGPIN, LOW); // LEDGPIN output as 0V (Logic low level). 44 digitalWrite (LEDRPIN, HIGH); // LEDRPIN output as 5V (Logic high level). 45 M1.setSpeed (100); // Speed down. 46 M2.setSpeed (100); // Speed down. 47 ChangePath (); // If forward is blocked Change direction. 48 } 49 else if ((Distance >= 30) && (Distance < 60)) { // If obstacle found between 30cm to 60cm. 50 digitalWrite (BuzzPIN, LOW); // BuzzPIN output as 0V (Logic low level). 51 digitalWrite (LEDBPIN, HIGH); // LEDBPIN output as 5V (Logic high level). 52 digitalWrite (LEDGPIN, LOW); // LEDGPIN output as 0V (Logic low level). 53 digitalWrite (LEDRPIN, LOW); // LEDRPIN output as 0V (Logic low level). 54 M1.setSpeed (150); // Speed increase slightly. 55 M2.setSpeed (150); // Speed increase slightly. 56 Forward (); // Robot move to Forward direction. 57 } 58 else if ((Distance >= 60) && (Distance < 90)) { // If obstacle found between 60cm to 90cm. 59 digitalWrite (BuzzPIN, LOW); // BuzzPIN output as 0V (Logic low level). 60 digitalWrite (LEDBPIN, LOW); // LEDBPIN output as 0V (Logic low level). 61 digitalWrite (LEDGPIN, HIGH); // LEDGPIN output as 5V (Logic high level). 62 digitalWrite (LEDRPIN, LOW); // LEDRPIN output as 0V (Logic low level). 63 M1.setSpeed (200); // Speed up. 64 M2.setSpeed (200); // Speed up. 65 Forward (); // Robot move to Forward direction. 66 } 67 else { // If obstacle cannot be found in 90cm. 68 digitalWrite (BuzzPIN, LOW); // BuzzPIN output as 0V (Logic low level). 69 digitalWrite (LEDBPIN, HIGH); // LEDBPIN output as 5V (Logic high level). 70 digitalWrite (LEDGPIN, HIGH); // LEDGPIN output as 5V (Logic high level). 71 digitalWrite (LEDRPIN, HIGH); // LEDRPIN output as 5V (Logic high level). 72 M1.setSpeed (250); // Speed increase fully. 73 M2.setSpeed (250); // Speed increase fully. 74 Forward (); // Robot move to Forward direction. 75 } 76} 77void ChangePath () { // Path Change loop. 78 Stop (); // Robot Stop. 79 Backward (); // Robot run Backward direction. 80 Stop (); // Robot Stop. 81 SER1.write (12); // Check Distance to the Right. 82 delay (500); // Delay for 0.5s. 83 RightDistance = Search (); // Set Right Distance. 84 delay (500); // Delay for 0.5s. 85 SER1.write (160); // Check Distance to the Left. 86 delay (1000); // Delay for 1s. 87 LeftDistance = Search (); // Set Left Distance. 88 delay (500); // Delay for 0.5s. 89 SER1.write (80); // Return to center. 90 delay (500); // Delay for 0.5s. 91 CompareDistance (); // Find the longest distance. 92} 93void CompareDistance () { // Distance Compare loop. 94 if (RightDistance > LeftDistance) { // If Right is less obstructed. 95 TurnRight (); // Robot Turn into Right direction. 96 } 97 else if (LeftDistance > RightDistance) { // If Left is less obstructed. 98 TurnLeft (); // Robot Turn into Left direction. 99 } 100 else { // If both are equally obstructed. 101 TurnAround (); // Robot Turn Around. 102 } 103} 104void Forward () { // Forward loop. 105 M1.run (FORWARD); // Turn DCMotor #1 to Forward. 106 M2.run (FORWARD); // Turn DCMotor #1 to Forward. 107} 108void Backward () { // Backward loop. 109 M1.run (BACKWARD); // Turn DCMotor #1 to Backward. 110 M2.run (BACKWARD); // Turn DCMotor #2 to Backward. 111 delay (500); // Delay for 1s. 112} 113void TurnRight () { // Right Turn loop. 114 M1.run (BACKWARD); // Turn DCMotor #1 to Backward. 115 M2.run (FORWARD); // Turn DCMotor #2 to Forward. 116 M1.setSpeed (100 + DCMROFF); // Calibrate the Speed of DCMotor #1. 117 delay (300); // Delay for 0.7s. 118} 119void TurnLeft () { // Left Turn loop. 120 M1.run (FORWARD); // Turn DCMotor #1 to Forward. 121 M2.run (BACKWARD); // Turn DCMotor #2 to Backward. 122 M2.setSpeed (100 + DCMROFF); // Calibrate the Speed of DCMotor #2. 123 delay (300); // Delay for 0.7s. 124} 125void TurnAround () { // Trun Around loop. 126 M1.run (FORWARD); // Turn DCMotor #1 to Forward. 127 M2.run (BACKWARD); // Turn DCMotor #2 to Backward. 128 M2.setSpeed (100 + DCMROFF); // Calibrate the Speed of DCMotor #2. 129 delay (700); // Delay for 2.1s. 130} 131void Stop () { // Stop loop. 132 M1.run (RELEASE); // Release DCMotor #1. 133 M2.run (RELEASE); // Release DCMotor #2. 134 delay (100); // Delay for 0.1s. 135}
CODE
arduino
copy and paste from the below
1#include <AFMotor.h> 2#include <Servo.h> // Add Servo Motor library. 3#define 4 BuzzPIN A0 // Assign PIN A0 as BuzzPIN (Connect Arduino UNO "A0" PIN with Buzzer 5 "+" PIN). 6#define TrigPIN A1 // PIN A1 as TrigPIN (Connect Arduino UNO "A1" 7 PIN with Ultrasonic Sonar Sensor "Trig" PIN). 8#define EchoPIN A2 // Assign 9 PIN A2 as EchoPIN (Connect Arduino UNO "A2" PIN with Ultrasonic Sonar Sensor "Trig" 10 PIN). 11#define LEDBPIN A3 // Assign PIN A3 as LEDBPIN (Connect Arduino UNO "A3" 12 PIN with RGB Diffused Common Cathode "LEDB" PIN). 13#define LEDGPIN A4 // Assign 14 PIN A4 as LEDGPIN (Connect Arduino UNO "A4" PIN with RGB Diffused Common Cathode 15 "LEDG" PIN). 16#define LEDRPIN A5 // Assign PIN A5 as LEDRPIN (Connect Arduino 17 UNO "A5" PIN with RGB Diffused Common Cathode "LEDR" PIN). 18#define DCMROFF 19 25 // This sets Offset to allow differences between the two DC traction Motors. 20AF_DCMotor 21 M1 (1, MOTOR12_64KHZ); // Create DCMotor #1 using M1 output, Set to 64kHz PWM frequency. 22AF_DCMotor 23 M2 (2, MOTOR12_64KHZ); // Create DCMotor #2 using M2 output, Set to 64kHz PWM frequency. 24Servo 25 SER1; // Create Servo object to control Servo. 26int Search (void) { // 27 Integer type variable declaration. 28 float Duration = 0.0; // Float 29 type variable declaration. 30 float CM = 0.0; // Float type 31 variable declaration. 32 digitalWrite (TrigPIN, LOW); // TrigPIN output 33 as 0V (Logic low level). 34 delayMicroseconds (2); // Delay for 2us, 35 Send 10 us high pulse to Ultrasonic Sonar Sensor "TrigPIN". 36 digitalWrite 37 (TrigPIN, HIGH); // TrigPIN output as 5V (Logic high level). 38 delayMicroseconds 39 (10); // Delay for 10us. 40 digitalWrite (TrigPIN, LOW); // 41 TrigPIN output as 0V (Logic low level). 42 Duration = pulseIn (EchoPIN, HIGH); 43 // Start counting time, Upto again EchoPIN back to logic "High Level" and puting 44 the "Time" into variable called "Duration". 45 CM = (Duration / 58.8); // 46 Convert Distance into CM. 47 return CM; // Return to 48 CM. 49} 50int RightDistance, LeftDistance; // Distances on either side. 51float 52 Distance = 0.00; // Float type variable declaration. 53void setup () 54 { // Setup loop. 55 pinMode (BuzzPIN, OUTPUT); // Declare BuzzPIN 56 as "Output PIN". 57 pinMode (TrigPIN, OUTPUT); // Declare TrigPIN as "Output 58 PIN". 59 pinMode (EchoPIN, INPUT); // Declare EchoPIN as "Output PIN". 60 61 pinMode (LEDBPIN, OUTPUT); // Declare LEDBPIN as "Output PIN". 62 pinMode 63 (LEDGPIN, OUTPUT); // Declare LEDGPIN as "Output PIN". 64 pinMode (LEDRPIN, 65 OUTPUT); // Declare LEDRPIN as "Output PIN". 66 SER1.attach (10); // 67 Attaches the Servo on pin 10 (SER1 on the Adafruit Motor Shield for Arduino kit 68 to the Servo object). 69} 70void loop () { // 71 Main loop. 72 SER1.write (80); // Tells the Servo 73 to position at 80 degrees (Facing forward). 74 delay (100); // 75 Delay for 0.1s. 76 Distance = Search (); // Measuring 77 the Distance in CM. 78 if (Distance < 30) { // If obstacle 79 found in 30cm. 80 digitalWrite (BuzzPIN, HIGH); // BuzzPIN output 81 as 5V (Logic high level). 82 digitalWrite (LEDBPIN, LOW); // 83 LEDBPIN output as 0V (Logic low level). 84 digitalWrite (LEDGPIN, LOW); // 85 LEDGPIN output as 0V (Logic low level). 86 digitalWrite (LEDRPIN, HIGH); // 87 LEDRPIN output as 5V (Logic high level). 88 M1.setSpeed (100); // 89 Speed down. 90 M2.setSpeed (100); // Speed down. 91 92 ChangePath (); // If forward is blocked Change 93 direction. 94 } 95 else if ((Distance >= 30) && (Distance < 60)) { // If obstacle 96 found between 30cm to 60cm. 97 digitalWrite (BuzzPIN, LOW); // 98 BuzzPIN output as 0V (Logic low level). 99 digitalWrite (LEDBPIN, HIGH); // 100 LEDBPIN output as 5V (Logic high level). 101 digitalWrite (LEDGPIN, LOW); // 102 LEDGPIN output as 0V (Logic low level). 103 digitalWrite (LEDRPIN, LOW); // 104 LEDRPIN output as 0V (Logic low level). 105 M1.setSpeed (150); // 106 Speed increase slightly. 107 M2.setSpeed (150); // 108 Speed increase slightly. 109 Forward (); // 110 Robot move to Forward direction. 111 } 112 else if ((Distance >= 60) && (Distance 113 < 90)) { // If obstacle found between 60cm to 90cm. 114 digitalWrite (BuzzPIN, 115 LOW); // BuzzPIN output as 0V (Logic low level). 116 digitalWrite 117 (LEDBPIN, LOW); // LEDBPIN output as 0V (Logic low level). 118 119 digitalWrite (LEDGPIN, HIGH); // LEDGPIN output as 5V (Logic 120 high level). 121 digitalWrite (LEDRPIN, LOW); // LEDRPIN output 122 as 0V (Logic low level). 123 M1.setSpeed (200); // 124 Speed up. 125 M2.setSpeed (200); // Speed up. 126 127 Forward (); // Robot move to Forward direction. 128 129 } 130 else { // If obstacle cannot be 131 found in 90cm. 132 digitalWrite (BuzzPIN, LOW); // BuzzPIN output 133 as 0V (Logic low level). 134 digitalWrite (LEDBPIN, HIGH); // 135 LEDBPIN output as 5V (Logic high level). 136 digitalWrite (LEDGPIN, HIGH); // 137 LEDGPIN output as 5V (Logic high level). 138 digitalWrite (LEDRPIN, HIGH); // 139 LEDRPIN output as 5V (Logic high level). 140 M1.setSpeed (250); // 141 Speed increase fully. 142 M2.setSpeed (250); // Speed 143 increase fully. 144 Forward (); // Robot move 145 to Forward direction. 146 } 147} 148void ChangePath () { // Path Change 149 loop. 150 Stop (); // Robot Stop. 151 Backward (); // 152 Robot run Backward direction. 153 Stop (); // Robot Stop. 154 155 SER1.write (12); // Check Distance to the Right. 156 delay (500); // 157 Delay for 0.5s. 158 RightDistance = Search (); // Set Right Distance. 159 delay 160 (500); // Delay for 0.5s. 161 SER1.write (160); // Check 162 Distance to the Left. 163 delay (1000); // Delay for 1s. 164 LeftDistance 165 = Search (); // Set Left Distance. 166 delay (500); // Delay for 167 0.5s. 168 SER1.write (80); // Return to center. 169 delay (500); // 170 Delay for 0.5s. 171 CompareDistance (); // Find the longest distance. 172} 173void 174 CompareDistance () { // Distance Compare loop. 175 if (RightDistance 176 > LeftDistance) { // If Right is less obstructed. 177 TurnRight (); // 178 Robot Turn into Right direction. 179 } 180 else if (LeftDistance > RightDistance) 181 { // If Left is less obstructed. 182 TurnLeft (); // 183 Robot Turn into Left direction. 184 } 185 else { // 186 If both are equally obstructed. 187 TurnAround (); // 188 Robot Turn Around. 189 } 190} 191void Forward () { // Forward loop. 192 M1.run 193 (FORWARD); // Turn DCMotor #1 to Forward. 194 M2.run (FORWARD); // Turn DCMotor 195 #1 to Forward. 196} 197void Backward () { // Backward loop. 198 M1.run (BACKWARD); 199 // Turn DCMotor #1 to Backward. 200 M2.run (BACKWARD); // Turn DCMotor #2 to 201 Backward. 202 delay (500); // Delay for 1s. 203} 204void TurnRight () { // 205 Right Turn loop. 206 M1.run (BACKWARD); // Turn DCMotor #1 to Backward. 207 208 M2.run (FORWARD); // Turn DCMotor #2 to Forward. 209 M1.setSpeed (100 210 + DCMROFF); // Calibrate the Speed of DCMotor #1. 211 delay (300); // 212 Delay for 0.7s. 213} 214void TurnLeft () { // Left Turn loop. 215 M1.run 216 (FORWARD); // Turn DCMotor #1 to Forward. 217 M2.run (BACKWARD); // 218 Turn DCMotor #2 to Backward. 219 M2.setSpeed (100 + DCMROFF); // Calibrate the 220 Speed of DCMotor #2. 221 delay (300); // Delay for 0.7s. 222} 223void 224 TurnAround () { // Trun Around loop. 225 M1.run (FORWARD); // 226 Turn DCMotor #1 to Forward. 227 M2.run (BACKWARD); // Turn DCMotor #2 228 to Backward. 229 M2.setSpeed (100 + DCMROFF); // Calibrate the Speed of DCMotor 230 #2. 231 delay (700); // Delay for 2.1s. 232} 233void Stop () { // 234 Stop loop. 235 M1.run (RELEASE); // Release DCMotor #1. 236 M2.run (RELEASE); 237 // Release DCMotor #2. 238 delay (100); // Delay for 0.1s. 239}
Downloadable files
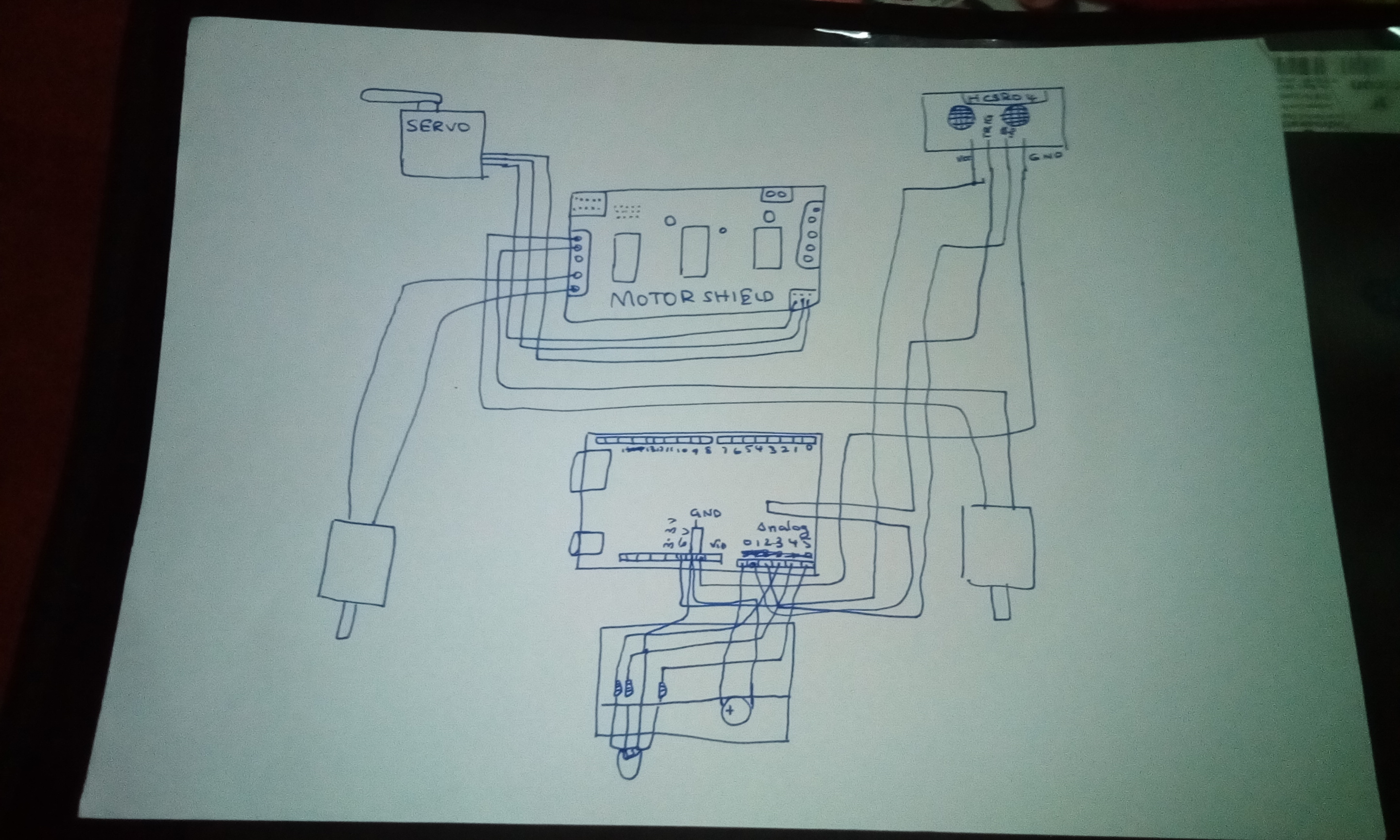
CIRCUIT
See the picture and connect the following
CIRCUIT
Comments
Only logged in users can leave comments