Microscope Manager
Device that manages the USB camera microscope: Make easy focus with DVD stepper motor and light the object with different colors and intens.
Devices & Components
Dual H-Bridge motor drivers L293D
RGB Diffused Common Cathode
Arduino Pro Mini 328 - 5V/16MHz
General Purpose Transistor NPN
Linear Regulator with Adjustable Output
Project description
Code
Microscope
arduino
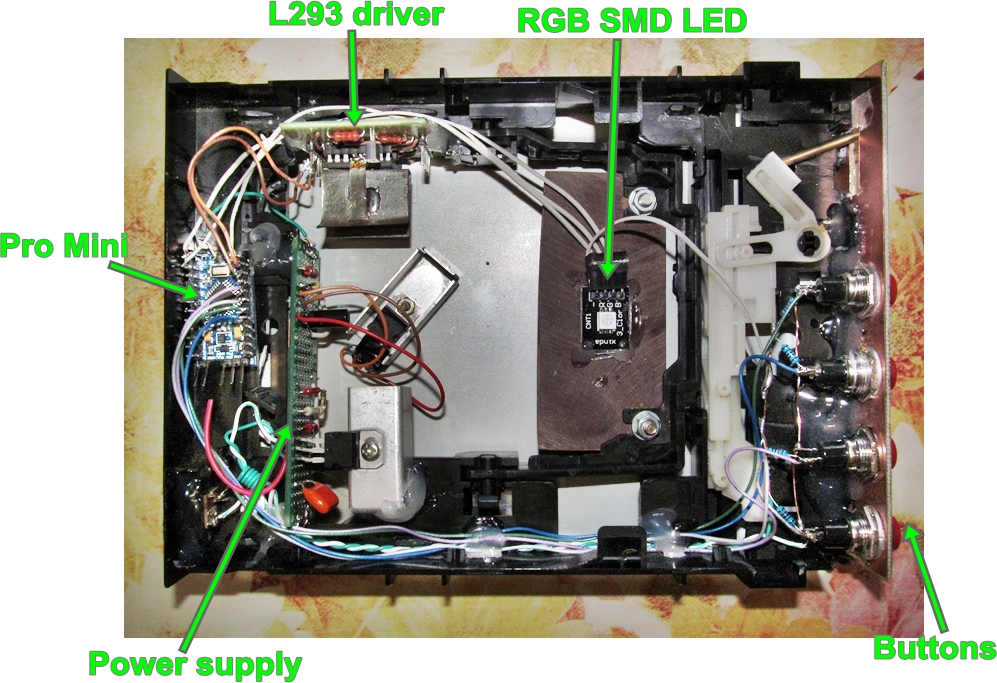
Two buttons comand "Focus" of the microscope. 1 button changes color and 1 changes brightness of the light for the object. Stepper motor driver is connected to pins 7 and 8; RGB LEDs connected to pins 11, 10, 9; LED comand buttons are connected to pins 2 and 3; and stepper motor comand buttons are connected to pins 4 and 5
Microscope
arduino
Two buttons comand "Focus" of the microscope. 1 button changes color and 1 changes brightness of the light for the object. Stepper motor driver is connected to pins 7 and 8; RGB LEDs connected to pins 11, 10, 9; LED comand buttons are connected to pins 2 and 3; and stepper motor comand buttons are connected to pins 4 and 5
Downloadable files
Breadboard scheme
Breadboard scheme

Documentation
Inside the box
Inside the box
Power stabilizer
Power stabilizer
Inside the box
Inside the box
Power stabilizer
Power stabilizer
Comments
Only logged in users can leave comments