Make Touchless ANY THING using ultrasonic sensor module
In this condition of COVid-19 we should avoid to touch like Doorbell so in this project to make anything Touchless/NON-contact
Devices & Components
1
Arduino Uno Rev3
1
Jumper wires (generic)
1
Relay Module (Generic)
1
Ultrasonic Sensor - HC-SR04 (Generic)
1
Breadboard (generic)
Project description
Code
CODE
c_cpp
CODE
c_cpp
Downloadable files
Schematics of this projects
Schematics of this projects

Schematics of this projects
Schematics of this projects
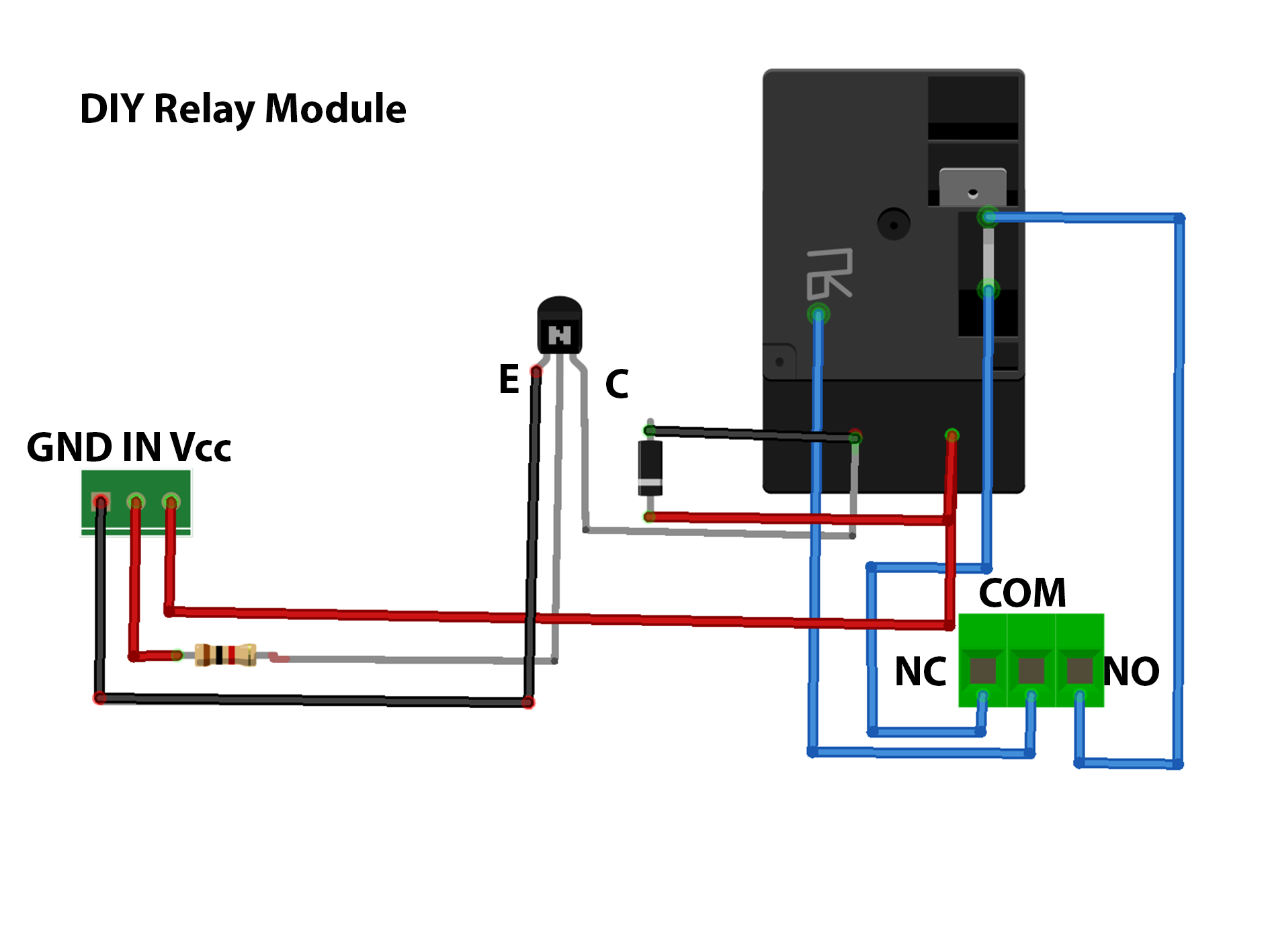
Schematics of relay module
if you do not have a relay module so don't worrie you can make your own by this Schematics
Schematics of relay module
Comments
Only logged in users can leave comments