The Arduino Radar
This project basically functions by using an ultrasonic sensor, the Arduino and the Processing app.
Components and supplies
1
Ultrasonic Sensor - HC-SR04 (Generic)
1
Arduino UNO
Apps and platforms
1
Processing
1
Arduino IDE
Project description
Code
Arduino Code
csharp
1#include <Servo.h> 2/* 3 code for arduino bord ultrasonic radar system. 4*/ 5 6Servo leftRightServo; // set a variable to map the servo 7int leftRightPos = 0; // set a variable to store the servo position 8const int numReadings = 10; // set a variable for the number of readings to take 9int index = 0; // the index of the current reading 10int total = 0; // the total of all readings 11int average = 0; // the average 12int echoPin = 6; // the SRF05's echo pin 13int initPin = 7; // the SRF05's init pin 14unsigned long pulseTime = 0; // variable for reading the pulse 15unsigned long distance = 0; // variable for storing distance 16 17/* setup the pins, servo and serial port */ 18void setup() { 19 leftRightServo.attach(9); 20 // make the init pin an output: 21 pinMode(initPin, OUTPUT); 22 // make the echo pin an input: 23 pinMode(echoPin, INPUT); 24 // initialize the serial port: 25 Serial.begin(9600); 26} 27 28/* begin rotating the servo and getting sensor values */ 29void loop() { 30 for (leftRightPos = 0; leftRightPos < 180; leftRightPos++) { // going left to right. 31 leftRightServo.write(leftRightPos); 32 for (index = 0; index <= numReadings; index++) { // take x number of readings from the sensor and average them 33 digitalWrite(initPin, LOW); 34 delayMicroseconds(50); 35 digitalWrite(initPin, HIGH); // send signal 36 delayMicroseconds(50); // wait 50 microseconds for it to return 37 digitalWrite(initPin, LOW); // close signal 38 pulseTime = pulseIn(echoPin, HIGH); // calculate time for signal to return 39 distance = pulseTime / 58; // convert to centimetres 40 total = total + distance; // update total 41 delay(10); 42 } 43 average = total / numReadings; // create average reading 44 45 if (index >= numReadings) { // reset the counts when at the last item of the array 46 index = 0; 47 total = 0; 48 } 49 Serial.print("X"); // print leading X to mark the following value as degrees 50 Serial.print(leftRightPos); // current servo position 51 Serial.print("V"); // preceeding character to separate values 52 Serial.println(average); // average of sensor readings 53 } 54 /* 55 start going right to left after we got to 180 degrees 56 same code as above 57 */ 58 for (leftRightPos = 180; leftRightPos > 0; leftRightPos--) { // going right to left 59 leftRightServo.write(leftRightPos); 60 for (index = 0; index <= numReadings; index++) { 61 digitalWrite(initPin, LOW); 62 delayMicroseconds(50); 63 digitalWrite(initPin, HIGH); 64 delayMicroseconds(50); 65 digitalWrite(initPin, LOW); 66 pulseTime = pulseIn(echoPin, HIGH); 67 distance = pulseTime / 58; 68 total = total + distance; 69 delay(10); 70 } 71 average = total / numReadings; 72 if (index >= numReadings) { 73 index = 0; 74 total = 0; 75 } 76 Serial.print("X"); 77 Serial.print(leftRightPos); 78 Serial.print("V"); 79 Serial.println(average); 80 } 81} 82
Processing Code
python
1import processing.serial.*; // import serial library 2Serial arduinoport; // declare a serial port 3float x, y; // variable to store x and y co-ordinates for vertices 4int radius = 350; // set the radius of objects 5int w = 300; // set an arbitary width value 6int degree = 0; // servo position in degrees 7int value = 0; // value from sensor 8int motion = 0; // value to store which way the servo is panning 9int[] newValue = new int[181]; // create an array to store each new sensor value for each servo position 10int[] oldValue = new int[181]; // create an array to store the previous values. 11PFont myFont; // setup fonts in Processing 12int radarDist = 0; // set value to configure Radar distance labels 13int firstRun = 0; // value to ignore triggering motion on the first 2 servo sweeps 14/* create background and serial buffer */ 15void setup(){ 16// setup the background size, colour and font. 17size(750, 450); 18background (0); // 0 = black 19myFont = createFont("verdana", 12); 20textFont(myFont); 21// setup the serial port and buffer 22arduinoport = new Serial(this, Serial.list()[0], 9600); 23} 24/* draw the screen */ 25void draw(){ 26fill(0); // set the following shapes to be black 27noStroke(); // set the following shapes to have no outline 28ellipse(radius, radius, 750, 750); // draw a circle with a width/ height = 750 with its center position (x and y) set by the radius 29rectMode(CENTER); // set the following rectangle to be drawn around its center 30rect(350,402,800,100); // draw rectangle (x, y, width, height) 31if (degree >= 179) { // if at the far right then set motion = 1/ true we're about to go right to left 32motion = 1; // this changes the animation to run right to left 33} 34if (degree <= 1) { // if servo at 0 degrees then we're about to go left to right 35motion = 0; // this sets the animation to run left to right 36} 37/* setup the radar sweep */ 38/* 39We use trigonmetry to create points around a circle. 40So the radius plus the cosine of the servo position converted to radians 41Since radians 0 start at 90 degrees we add 180 to make it start from the left 42Adding +1 (i) each time through the loops to move 1 degree matching the one degree of servo movement 43cos is for the x left to right value and sin calculates the y value 44since its a circle we plot our lines and vertices around the start point for everything will always be the center. 45*/ 46strokeWeight(7); // set the thickness of the lines 47if (motion == 0) { // if going left to right 48for (int i = 0; i <= 20; i++) { // draw 20 lines with fading colour each 1 degree further round than the last 49stroke(0, (10*i), 0); // set the stroke colour (Red, Green, Blue) base it on the the value of i 50line(radius, radius, radius + cos(radians(degree+(180+i)))*w, radius + sin(radians(degree+(180+i)))*w); // line(start x, start y, end x, end y) 51} 52} else { // if going right to left 53for (int i = 20; i >= 0; i--) { // draw 20 lines with fading colour 54stroke(0,200-(10*i), 0); // using standard RGB values, each between 0 and 255 55line(radius, radius, radius + cos(radians(degree+(180+i)))*w, radius + sin(radians(degree+(180+i)))*w); 56} 57} 58/* Setup the shapes made from the sensor values */ 59noStroke(); // no outline 60/* first sweep */ 61fill(0,50,0); // set the fill colour of the shape (Red, Green, Blue) 62beginShape(); // start drawing shape 63for (int i = 0; i < 180; i++) { // for each degree in the array 64x = radius + cos(radians((180+i)))*((oldValue[i])); // create x coordinate 65y = radius + sin(radians((180+i)))*((oldValue[i])); // create y coordinate 66vertex(x, y); // plot vertices 67} 68endShape(); // end shape 69/* second sweep */ 70fill(0,110,0); 71beginShape(); 72for (int i = 0; i < 180; i++) { 73x = radius + cos(radians((180+i)))*(newValue[i]); 74y = radius + sin(radians((180+i)))*(newValue[i]); 75vertex(x, y); 76} 77endShape(); 78/* average */ 79fill(0,170,0); 80beginShape(); 81for (int i = 0; i < 180; i++) { 82x = radius + cos(radians((180+i)))*((newValue[i]+oldValue[i])/2); // create average 83y = radius + sin(radians((180+i)))*((newValue[i]+oldValue[i])/2); 84vertex(x, y); 85} 86endShape(); 87/* if after first 2 sweeps, highlight motion with red circle*/ 88if (firstRun >= 360) { 89stroke(150,0,0); 90strokeWeight(1); 91noFill(); 92for (int i = 0; i < 180; i++) { 93if (oldValue[i] - newValue[i] > 35 || newValue[i] - oldValue[i] > 35) { 94x = radius + cos(radians((180+i)))*(newValue[i]); 95y = radius + sin(radians((180+i)))*(newValue[i]); 96ellipse(x, y, 10, 10); 97} 98} 99} 100/* set the radar distance rings and out put their values, 50, 100, 150 etc.. */ 101for (int i = 0; i <=6; i++){ 102noFill(); 103strokeWeight(1); 104stroke(0, 255-(30*i), 0); 105ellipse(radius, radius, (100*i), (100*i)); 106fill(0, 100, 0); 107noStroke(); 108text(Integer.toString(radarDist+50), 380, (305-radarDist), 50, 50); 109radarDist+=50; 110} 111radarDist = 0; 112/* draw the grid lines on the radar every 30 degrees and write their values 180, 210, 240 etc.. */ 113for (int i = 0; i <= 6; i++) { 114strokeWeight(1); 115stroke(0, 55, 0); 116line(radius, radius, radius + cos(radians(180+(30*i)))*w, radius + sin(radians(180+(30*i)))*w); 117fill(0, 55, 0); 118noStroke(); 119if (180+(30*i) >= 300) { 120text(Integer.toString(180+(30*i)), (radius+10) + cos(radians(180+(30*i)))*(w+10), (radius+10) + sin(radians(180+(30*i)))*(w+10), 25,50); 121} else { 122text(Integer.toString(180+(30*i)), radius + cos(radians(180+(30*i)))*w, radius + sin(radians(180+(30*i)))*w, 60,40); 123} 124} 125/* Write information text and values. */ 126noStroke(); 127fill(0); 128rect(350,402,800,100); 129fill(0, 100, 0); 130text("Degrees: "+Integer.toString(degree), 100, 380, 100, 50); // use Integet.toString to convert numeric to string as text() only outputs strings 131text("Distance: "+Integer.toString(value), 100, 400, 100, 50); // text(string, x, y, width, height) 132text("Radar screen code ", 540, 380, 250, 50); 133fill(0); 134rect(70,60,150,100); 135fill(0, 100, 0); 136text("Screen Key:", 100, 50, 150, 50); 137fill(0,50,0); 138rect(30,53,10,10); 139text("First sweep", 115, 70, 150, 50); 140fill(0,110,0); 141rect(30,73,10,10); 142text("Second sweep", 115, 90, 150, 50); 143fill(0,170,0); 144rect(30,93,10,10); 145text("Average", 115, 110, 150, 50); 146noFill(); 147stroke(150,0,0); 148strokeWeight(1); 149ellipse(29, 113, 10, 10); 150fill(150,0,0); 151text("Motion", 115, 130, 150, 50); 152} 153/* get values from serial port */ 154void serialEvent (Serial arduinoport) { 155String xString = arduinoport.readStringUntil('\n'); // read the serial port until a new line 156if (xString != null) { // if theres data in between the new lines 157xString = trim(xString); // get rid of any whitespace just in case 158String getX = xString.substring(1, xString.indexOf("V")); // get the value of the servo position 159String getV = xString.substring(xString.indexOf("V")+1, xString.length()); // get the value of the sensor reading 160degree = Integer.parseInt(getX); // set the values to variables 161value = Integer.parseInt(getV); 162oldValue[degree] = newValue[degree]; // store the values in the arrays. 163newValue[degree] = value; 164/* sets a counter to allow for the first 2 sweeps of the servo */ 165firstRun++; 166if (firstRun > 360) { 167firstRun = 360; // keep the value at 360 168} 169} 170} 171
Processing Code
python
1import processing.serial.*; // import serial library 2Serial arduinoport; 3 // declare a serial port 4float x, y; // 5 variable to store x and y co-ordinates for vertices 6int radius = 350; // 7 set the radius of objects 8int w = 300; // set an arbitary 9 width value 10int degree = 0; // servo position in degrees 11int 12 value = 0; // value from sensor 13int motion = 0; // 14 value to store which way the servo is panning 15int[] newValue = new int[181]; 16 // create an array to store each new sensor value for each servo position 17int[] 18 oldValue = new int[181]; // create an array to store the previous values. 19PFont 20 myFont; // setup fonts in Processing 21int radarDist = 0; // 22 set value to configure Radar distance labels 23int firstRun = 0; // 24 value to ignore triggering motion on the first 2 servo sweeps 25/* create background 26 and serial buffer */ 27void setup(){ 28// setup the background size, colour and 29 font. 30size(750, 450); 31background (0); // 0 = black 32myFont = createFont("verdana", 33 12); 34textFont(myFont); 35// setup the serial port and buffer 36arduinoport 37 = new Serial(this, Serial.list()[0], 9600); 38} 39/* draw the screen */ 40void 41 draw(){ 42fill(0); // set the following shapes to 43 be black 44noStroke(); // set the following shapes to 45 have no outline 46ellipse(radius, radius, 750, 750); // draw a circle with a 47 width/ height = 750 with its center position (x and y) set by the radius 48rectMode(CENTER); 49 // set the following rectangle to be drawn around its center 50rect(350,402,800,100); 51 // draw rectangle (x, y, width, height) 52if (degree >= 179) { 53 // if at the far right then set motion = 1/ true we're about to 54 go right to left 55motion = 1; // this changes the animation 56 to run right to left 57} 58if (degree <= 1) { // if servo at 59 0 degrees then we're about to go left to right 60motion = 0; // 61 this sets the animation to run left to right 62} 63/* setup the radar sweep */ 64/* 65 66We use trigonmetry to create points around a circle. 67So the radius plus the 68 cosine of the servo position converted to radians 69Since radians 0 start at 90 70 degrees we add 180 to make it start from the left 71Adding +1 (i) each time through 72 the loops to move 1 degree matching the one degree of servo movement 73cos is for 74 the x left to right value and sin calculates the y value 75since its a circle we 76 plot our lines and vertices around the start point for everything will always be 77 the center. 78*/ 79strokeWeight(7); // set the thickness 80 of the lines 81if (motion == 0) { // if going left to right 82for 83 (int i = 0; i <= 20; i++) { // draw 20 lines with fading colour each 1 degree 84 further round than the last 85stroke(0, (10*i), 0); // set the stroke 86 colour (Red, Green, Blue) base it on the the value of i 87line(radius, radius, 88 radius + cos(radians(degree+(180+i)))*w, radius + sin(radians(degree+(180+i)))*w); 89 // line(start x, start y, end x, end y) 90} 91} else { // 92 if going right to left 93for (int i = 20; i >= 0; i--) { // draw 20 lines with 94 fading colour 95stroke(0,200-(10*i), 0); // using standard RGB values, 96 each between 0 and 255 97line(radius, radius, radius + cos(radians(degree+(180+i)))*w, 98 radius + sin(radians(degree+(180+i)))*w); 99} 100} 101/* Setup the shapes made 102 from the sensor values */ 103noStroke(); // no outline 104/* 105 first sweep */ 106fill(0,50,0); // set the fill colour of 107 the shape (Red, Green, Blue) 108beginShape(); // start drawing 109 shape 110for (int i = 0; i < 180; i++) { // for each degree in the array 111x 112 = radius + cos(radians((180+i)))*((oldValue[i])); // create x coordinate 113y = 114 radius + sin(radians((180+i)))*((oldValue[i])); // create y coordinate 115vertex(x, 116 y); // plot vertices 117} 118endShape(); // 119 end shape 120/* second sweep */ 121fill(0,110,0); 122beginShape(); 123for (int i 124 = 0; i < 180; i++) { 125x = radius + cos(radians((180+i)))*(newValue[i]); 126y = 127 radius + sin(radians((180+i)))*(newValue[i]); 128vertex(x, y); 129} 130endShape(); 131/* 132 average */ 133fill(0,170,0); 134beginShape(); 135for (int i = 0; i < 180; i++) { 136x 137 = radius + cos(radians((180+i)))*((newValue[i]+oldValue[i])/2); // create average 138y 139 = radius + sin(radians((180+i)))*((newValue[i]+oldValue[i])/2); 140vertex(x, y); 141} 142endShape(); 143/* 144 if after first 2 sweeps, highlight motion with red circle*/ 145if (firstRun >= 360) 146 { 147stroke(150,0,0); 148strokeWeight(1); 149noFill(); 150for (int i = 0; i < 180; 151 i++) { 152if (oldValue[i] - newValue[i] > 35 || newValue[i] - oldValue[i] > 35) 153 { 154x = radius + cos(radians((180+i)))*(newValue[i]); 155y = radius + sin(radians((180+i)))*(newValue[i]); 156ellipse(x, 157 y, 10, 10); 158} 159} 160} 161/* set the radar distance rings and out put their 162 values, 50, 100, 150 etc.. */ 163for (int i = 0; i <=6; i++){ 164noFill(); 165strokeWeight(1); 166stroke(0, 167 255-(30*i), 0); 168ellipse(radius, radius, (100*i), (100*i)); 169fill(0, 100, 0); 170noStroke(); 171text(Integer.toString(radarDist+50), 172 380, (305-radarDist), 50, 50); 173radarDist+=50; 174} 175radarDist = 0; 176/* draw 177 the grid lines on the radar every 30 degrees and write their values 180, 210, 240 178 etc.. */ 179for (int i = 0; i <= 6; i++) { 180strokeWeight(1); 181stroke(0, 55, 182 0); 183line(radius, radius, radius + cos(radians(180+(30*i)))*w, radius + sin(radians(180+(30*i)))*w); 184fill(0, 185 55, 0); 186noStroke(); 187if (180+(30*i) >= 300) { 188text(Integer.toString(180+(30*i)), 189 (radius+10) + cos(radians(180+(30*i)))*(w+10), (radius+10) + sin(radians(180+(30*i)))*(w+10), 190 25,50); 191} else { 192text(Integer.toString(180+(30*i)), radius + cos(radians(180+(30*i)))*w, 193 radius + sin(radians(180+(30*i)))*w, 60,40); 194} 195} 196/* Write information text 197 and values. */ 198noStroke(); 199fill(0); 200rect(350,402,800,100); 201fill(0, 100, 202 0); 203text("Degrees: "+Integer.toString(degree), 100, 380, 100, 50); // 204 use Integet.toString to convert numeric to string as text() only outputs strings 205text("Distance: 206 "+Integer.toString(value), 100, 400, 100, 50); // text(string, x, y, width, 207 height) 208text("Radar screen code ", 540, 380, 250, 50); 209fill(0); 210rect(70,60,150,100); 211fill(0, 212 100, 0); 213text("Screen Key:", 100, 50, 150, 50); 214fill(0,50,0); 215rect(30,53,10,10); 216text("First 217 sweep", 115, 70, 150, 50); 218fill(0,110,0); 219rect(30,73,10,10); 220text("Second 221 sweep", 115, 90, 150, 50); 222fill(0,170,0); 223rect(30,93,10,10); 224text("Average", 225 115, 110, 150, 50); 226noFill(); 227stroke(150,0,0); 228strokeWeight(1); 229ellipse(29, 230 113, 10, 10); 231fill(150,0,0); 232text("Motion", 115, 130, 150, 50); 233} 234/* 235 get values from serial port */ 236void serialEvent (Serial arduinoport) { 237String 238 xString = arduinoport.readStringUntil('\ 239'); // read the serial port until a new 240 line 241if (xString != null) { // if theres data in between the new lines 242xString 243 = trim(xString); // get rid of any whitespace just in case 244String getX = xString.substring(1, 245 xString.indexOf("V")); // get the value of the servo position 246String getV = 247 xString.substring(xString.indexOf("V")+1, xString.length()); // get the value 248 of the sensor reading 249degree = Integer.parseInt(getX); // set the values to variables 250value 251 = Integer.parseInt(getV); 252oldValue[degree] = newValue[degree]; // store the values 253 in the arrays. 254newValue[degree] = value; 255/* sets a counter to allow for 256 the first 2 sweeps of the servo */ 257firstRun++; 258if (firstRun > 360) { 259firstRun 260 = 360; // keep the value at 360 261} 262} 263} 264
Arduino Code
csharp
1#include <Servo.h> 2/* 3 code for arduino bord ultrasonic radar system. 4*/ 5 6Servo 7 leftRightServo; // set a variable to map the servo 8int leftRightPos = 9 0; // set a variable to store the servo position 10const int numReadings 11 = 10; // set a variable for the number of readings to take 12int index = 0; // 13 the index of the current reading 14int total = 0; // the total of 15 all readings 16int average = 0; // the average 17int echoPin = 6; 18 // the SRF05's echo pin 19int initPin = 7; // the SRF05's 20 init pin 21unsigned long pulseTime = 0; // variable for reading the pulse 22unsigned 23 long distance = 0; // variable for storing distance 24 25/* setup the pins, 26 servo and serial port */ 27void setup() { 28 leftRightServo.attach(9); 29 // 30 make the init pin an output: 31 pinMode(initPin, OUTPUT); 32 // make the echo 33 pin an input: 34 pinMode(echoPin, INPUT); 35 // initialize the serial port: 36 37 Serial.begin(9600); 38} 39 40/* begin rotating the servo and getting sensor 41 values */ 42void loop() { 43 for (leftRightPos = 0; leftRightPos < 180; leftRightPos++) 44 { // going left to right. 45 leftRightServo.write(leftRightPos); 46 for 47 (index = 0; index <= numReadings; index++) { // take x number of readings 48 from the sensor and average them 49 digitalWrite(initPin, LOW); 50 delayMicroseconds(50); 51 52 digitalWrite(initPin, HIGH); // send signal 53 54 delayMicroseconds(50); // wait 50 microseconds 55 for it to return 56 digitalWrite(initPin, LOW); // 57 close signal 58 pulseTime = pulseIn(echoPin, HIGH); // 59 calculate time for signal to return 60 distance = pulseTime / 58; // 61 convert to centimetres 62 total = total + distance; // 63 update total 64 delay(10); 65 } 66 average = total / numReadings; 67 // create average reading 68 69 if (index >= numReadings) 70 { // reset the counts when at the last item of the 71 array 72 index = 0; 73 total = 0; 74 } 75 Serial.print("X"); 76 // print leading X to mark the following 77 value as degrees 78 Serial.print(leftRightPos); // 79 current servo position 80 Serial.print("V"); // 81 preceeding character to separate values 82 Serial.println(average); // 83 average of sensor readings 84 } 85 /* 86 start going right to left after 87 we got to 180 degrees 88 same code as above 89 */ 90 for (leftRightPos = 91 180; leftRightPos > 0; leftRightPos--) { // going right to left 92 leftRightServo.write(leftRightPos); 93 94 for (index = 0; index <= numReadings; index++) { 95 digitalWrite(initPin, 96 LOW); 97 delayMicroseconds(50); 98 digitalWrite(initPin, HIGH); 99 100 delayMicroseconds(50); 101 digitalWrite(initPin, LOW); 102 pulseTime 103 = pulseIn(echoPin, HIGH); 104 distance = pulseTime / 58; 105 total = total 106 + distance; 107 delay(10); 108 } 109 average = total / numReadings; 110 111 if (index >= numReadings) { 112 index = 0; 113 total = 0; 114 } 115 116 Serial.print("X"); 117 Serial.print(leftRightPos); 118 Serial.print("V"); 119 120 Serial.println(average); 121 } 122} 123
Downloadable files
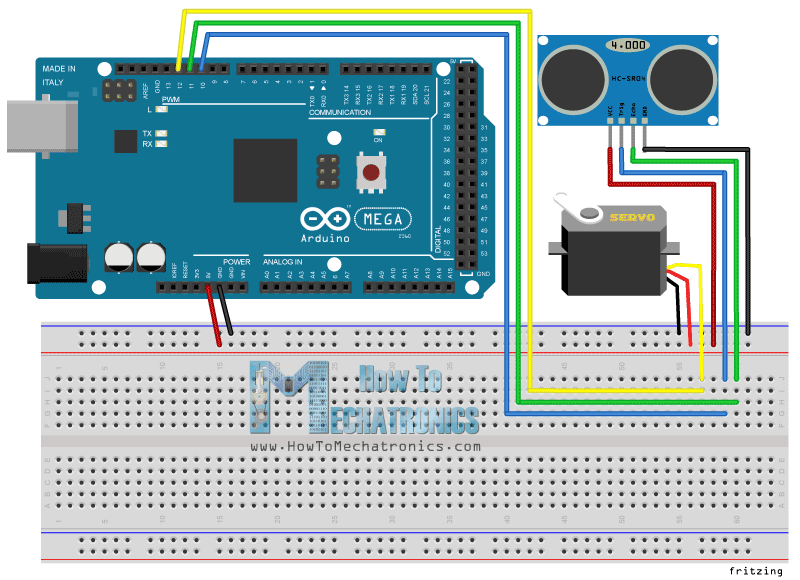
Please do not use the given diagram wirings. This is only as a demonstration.
Please do not use the given diagram wirings. This is only as a demonstration.
Please do not use the given diagram wirings. This is only as a demonstration.
Please do not use the given diagram wirings. This is only as a demonstration.
Documentation
ultrasonic_sensor_yUKZ11v0h4.pde
ultrasonic_sensor_yUKZ11v0h4.pde
Comments
Only logged in users can leave comments